Schneider Electric TSXCSY84 / 164 Module SERCOS®, PL7 Junior/Pro Métiers Automates Premium Commande de mouvements Mode d'emploi
PDF
Documento
PL7 Junior/Pro
Métiers Automates Premium
Commande de mouvements Module
SERCOS® TSX CSY 84 / 164
Manuel de mise en oeuvre métiers
35009561.01
07/2008 fre
www.schneider-electric.com
2
Structure de la documentation
Structure de la documentation
Présentation
Ce manuel se compose de 8 tomes :
z
z
z
z
z
z
z
z
35009561.01 07/2008
Tome 1
z Communs fonctions métiers
z Métier Tout ou Rien
z Mise en oeuvre AS-i
z Métier Dialogue opérateur
Tome 2
z Métier Comptage
Tome 3
z Métier Commande d’axes
Tome 4
z Métier Commande d’axes pas à pas
Tome 5
z Métier Came électronique
Tome 6
z Métier SERCOS®
Tome 7
z Métier Analogique
z Métier PID Control
z Métier Pesage
Tome 8
z Métier Régulation
3
Structure de la documentation
4
35009561.01 07/2008
Table des matières
A propos de ce manuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Partie I L’offre SERCOS® dans les automates Premium. . . . . . 15
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Chapitre 1
Architecture SERCOS® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation de l’architecture SERCOS® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Evolution des modules TSX CSY •4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limitations des services PL7 en fonction des versions des modules . . . . . . . . .
Chapitre 2
Méthodologie de mise en oeuvre . . . . . . . . . . . . . . . . . . . . . . . 27
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mise en oeuvre d’un axe indépendant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mise en oeuvre d’un groupe d’axes coordonnés ou suiveurs . . . . . . . . . . . . . . .
Chapitre 3
27
28
30
32
Exemple d’initiation : module TSX CSY 84 . . . . . . . . . . . . . . . 33
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Description de l’exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Description de la trajectoire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Description des commandes en mode manuel . . . . . . . . . . . . . . . . . . . . . . . . . .
Pré-requis et méthodologie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Configuration du variateur de vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Configuration du module TSX CSY 84 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Symbolisation des variables E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Symbolisation des variables Mémoires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programmation du traitement préliminaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programmation du Grafcet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programmation des transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programmation des actions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Programmation du traitement postérieur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Transfert du programme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Réglage des paramètres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35009561.01 07/2008
17
18
20
22
25
33
34
36
37
38
39
40
43
44
45
46
47
49
52
56
57
5
Présentation du mode Mise au point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Partie II Commande de mouvement commune aux modules
TSX CSY 84 / 164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Chapitre 4
Présentation fonctionnelle des modules TSX CSY 84 / 164 . 63
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Fonctions des modules TSX CSY 84 / 164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Fonction "SERCOS®" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Fonction "axe réel". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Fonction "axe imaginaire" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Fonction "axe à mesure externe". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Notion de groupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Fonction "groupe d’axes coordonnés" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Fonction "groupe d’axes suiveurs". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Fonction "profil de came" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Chapitre 5
Configuration du module TSX CSY 84 . . . . . . . . . . . . . . . . . . . 79
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Présymbolisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Configuration du module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Configuration des voies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Configuration de la fonction SERCOS® (voie 0) . . . . . . . . . . . . . . . . . . . . . . . . . 84
Configuration d’un axe indépendant (voies 1 à 12) . . . . . . . . . . . . . . . . . . . . . . . 85
Configuration d’un axe à mesure externe (voies 13 à 16) . . . . . . . . . . . . . . . . . . 90
Configuration d’un groupe d’axes coordonnés (voies 17 à 20) . . . . . . . . . . . . . . 92
Configuration d’un groupe d’axes suiveurs (voies 21 à 24) . . . . . . . . . . . . . . . . . 93
Configuration d’un profil de came . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Chapitre 6
6.1
6
Programmation des modules TSX CSY 84 / 164 . . . . . . . . . . . 99
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Bits d’état de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Bit RAMPING (%Ixy.i.0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Bit STEADY (%Ixy.i.1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Bit STOPPING (%Ixy.i.2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Bit PROFILE_END (%Ixy.i.3). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Bit IN_POSITION (%Ixy.i.4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Bit AXIS_HOMING (%Ixy.i.5). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Bit AXIS_HOMED (%Ixy.i.6) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Bit AXIS_NOT_FOLLOWING (%Ixy.i.7) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Bit HOLDING (%Ixy.i.8) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Bit RESUMING (%Ixy.i.9) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Bit DRIVE_ENABLED (%Ixy.i.10) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Bit DRIVE_DIAG (%Ixy.i.11) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
35009561.01 07/2008
6.2
6.3
6.4
35009561.01 07/2008
Bit DRIVE_WARNING (%Ixy.i.12). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit DRIVE_FAULT (%Ixy.i.13). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit DRIVE_DISABLED (%Ixy.i.14) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_SUMMARY_FAULT (%Ixy.i.15) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_COMM_OK (%Ixy.i.16) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_IS_LINKED (%Ixy.i.17). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_AT_TARGET (%Ixy.i.20) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BIt AXIS_POS_LIMIT (%Ixy.i.21) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_NEG_LIMIT (%Ixy.i.22) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_IN_COMMAND (%Ixy.i.18) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_WARNING (%Ixy.i.23) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit BIAS_REMAIN (%Ixy.i.24) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BIT AXIS_MANUAL_MODE (%Ixy.i.25) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit DRIVE_REALTIME_BIT1 (%Ixy.i.26). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit DRIVE_REALTIME_BIT2 (%Ixy.i.27). . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_HOLD (%Ixy.i.28) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_HALT (%Ixy.i.29) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_FASTSTOP (%Ixy.i.30) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit AXIS_READY (%Ixy.i.31). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bit CONF_OK (%Ixy.i.32) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonctions de commande de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonctions de commande de mouvement : Généralités. . . . . . . . . . . . . . . . . . .
Règles de gestion des bits ALLOW et CONTROL . . . . . . . . . . . . . . . . . . . . . .
Bits CommandeMouvement modifiables sur front. . . . . . . . . . . . . . . . . . . . . . .
Bits de commande modifiables sur changement d’état. . . . . . . . . . . . . . . . . . .
Bits et mots d'état . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mode manuel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction Set_Functional_Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction Home . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Prise d’origine avec la fonction Home . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction ForcedHomed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction Unhome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction SetPosition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonctions de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A propos des fonctions de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Type de données MoveType. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction MoveImmed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction MoveQueue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction GetMoveQueueLength . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction GetSpeedOverride et SetSpeedOverride . . . . . . . . . . . . . . . . . . . . . .
Fonction EnableRealTimeCtrlBit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction de mouvement à la désactivation de suivi . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
134
135
136
137
138
139
140
143
144
146
147
148
149
150
150
151
153
154
156
158
159
160
161
161
7
6.5
6.6
Chapitre 7
7.1
7.2
8
Description globale de la fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Fonction "MoveImmed" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Fonction "MoveQueue" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Fonctions de position/vitesse courante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
FonctionGetActualSpeed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
FonctionGetCommandSpeed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Service compteur de Modulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Fonction GetUnrolledPosition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Fonction GetUnrolledCommandedPosition . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Fonction GetCommandedPosition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Fonctions de suivi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
A propos des fonctions de suivi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Fonction "activation de suivi sur cible". . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
Fonction "Estimation du temps restant avant l’activation du suivi" . . . . . . . . . . 180
Arrêt de suivi (Unlink) du groupe suiveur déclenché par un trigger . . . . . . . . . . 182
Réglage des modules TSX CSY 84 / 164 . . . . . . . . . . . . . . . . 185
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
Réglage d’un module SERCOS(r) : Généralités . . . . . . . . . . . . . . . . . . . . . . . . 186
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
Description des écrans de réglage d’un module SERCOS® :Généralités. . . . . 187
Principes de réglage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Réglage des paramètres d’un axe réel, imaginaire ou à mesure externe . . . . . 190
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
Description de l’écran de réglage d’un module SERCOS® :
Axes réels ou imaginaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
Description de l’écran de réglage d’un module SERCOS® :
Axes à mesure externe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
Description de l’écran TRF_RECIPE pour les axes réels . . . . . . . . . . . . . . . . . 195
TRF_RECIPE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
TRF_RECIPE Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
Paramètre Vitesse : DefaultSpeed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
Paramètre Vitesse : SpeedLimit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
A propos des paramètres d’accélération/décélération. . . . . . . . . . . . . . . . . . . . 202
Paramètre Accélération/Déccélération : Accel. . . . . . . . . . . . . . . . . . . . . . . . . . 203
Paramètre Accélération/Déccélération : Decel . . . . . . . . . . . . . . . . . . . . . . . . . 204
Paramètre Accélération/Déccélération : AccelMax . . . . . . . . . . . . . . . . . . . . . . 205
Paramètre Accélération/Déccélération : DecelMax . . . . . . . . . . . . . . . . . . . . . . 206
Paramètre Accélération/Déccélération : AccelType. . . . . . . . . . . . . . . . . . . . . . 207
Donnée TypeAccélération . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
Paramètres résolution : GearRatio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
Paramètre Limite de position et Modulo : PositionLimit . . . . . . . . . . . . . . . . . . . 212
A propos du modulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
Paramètre Limite de position et Modulo : RolloverLimit. . . . . . . . . . . . . . . . . . . 216
35009561.01 07/2008
7.3
7.4
7.5
7.6
Chapitre 8
35009561.01 07/2008
Paramètre Limite de position et Modulo : EnableRollover . . . . . . . . . . . . . . . .
A propos de la fenêtre au point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre Limite de position : InPositionBand . . . . . . . . . . . . . . . . . . . . . . . . .
A propos du mode d’activation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre Limite de position : EnableMode . . . . . . . . . . . . . . . . . . . . . . . . . . .
Comportement sur dévalidation d’un axe . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètres d’un groupe d’axes suiveurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Description de l’écran de réglage d’un module SERCOS® :
Axes suiveurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A propos d'un groupe d'axes suiveurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Donnée ModeSuiveur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : FollowerMode . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : FollowerConfig . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : FollowerRatio . . . . . . . . . . . . . . . . . . . . . . . .
A propos de l'offset maître . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : MasterOffset . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : MasterTriggerPosition. . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : FollowerBias . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un groupe suiveur : AbsFollowerBias . . . . . . . . . . . . . . . . . . . . . .
Propagation des arrêts dans un groupe suiveur . . . . . . . . . . . . . . . . . . . . . . . .
Fonction d’alignement des pentes d’arrêt d’urgence. . . . . . . . . . . . . . . . . . . . .
Réglage d’un profil de came . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A propos d'un profil de came. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un profil de came : Length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un profil de came : La fonction LookUpFollowerPosition. . . . . . .
Paramètre d’un profil de came : Coord . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un profil de came : InterpType . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre d’un profil de came : ProfileId . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Description de l’écran TRF_RECIPE pour les profils de came . . . . . . . . . . . . .
Instruction TRF_RECIPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètres de l’anneau Sercos® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Description de l’écran de réglage d’un module SERCOS® :
Anneau SERCOS® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Graphique de réglage de la puissance optique. . . . . . . . . . . . . . . . . . . . . . . . .
Paramètre de l’anneau Sercos® : OpticalPower. . . . . . . . . . . . . . . . . . . . . . . .
Fonctions de lecture/écriture des IDN SERCOS® . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètres Variateurs : IDN_S et IDN_P . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètres Variateurs : IDN_US etIDN_UP . . . . . . . . . . . . . . . . . . . . . . . . . . .
Numéros d'identification (IDN) SERCOS standard . . . . . . . . . . . . . . . . . . . . . .
IDN des télégrammes personnalisés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
217
218
219
220
222
224
225
225
226
228
231
232
233
235
238
239
241
243
244
246
247
249
249
250
251
252
253
255
256
257
259
261
261
262
263
264
265
265
266
268
271
274
Mise au point des modules TSX CSY 84 / 164 . . . . . . . . . . . . 275
9
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
Description de l’écran de mise au point : Généralités . . . . . . . . . . . . . . . . . . . . 276
Interface utilisateur de l’écran de mise au point. . . . . . . . . . . . . . . . . . . . . . . . . 279
Mise au point : Validation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
Mise au point : Diagnostic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
Mise au point : Mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Mise au point : Envoi de commande (mode Auto) . . . . . . . . . . . . . . . . . . . . . . . 287
Mise au point : Commande manuelle (mode Manuel) . . . . . . . . . . . . . . . . . . . . 288
Mise au point : Référence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
Mise au point : Suivi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
Mise au point : Variateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
Mise au point : Position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
Diagnostic du module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
Diagnostic de la voie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
Chapitre 9
9.1
9.2
9.3
9.4
9.5
10
Diagnostic et maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
Diagnostic de la phase SERCOS® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
A propos de la norme des phases SERCOS® . . . . . . . . . . . . . . . . . . . . . . . . . 297
Fonction GetActualPhase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
Fonction GetCommandedPhase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
Lecture des informations courantes du bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
Fonction GetSercosAddress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
Fonction GetNumberOfDrivesInRing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
Fonction IsLoopUp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Identification de l’axe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
Fonction GetNumberInSet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
Informations de défaut et d’état . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
Objets à échange implicite. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306
Défauts accessibles par la commande GetMotionFault. . . . . . . . . . . . . . . . . . . 307
Fonction GetMotionFault . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
Défauts accessibles par la commande GetMotionWarning . . . . . . . . . . . . . . . . 311
Fonction GetMotionWarning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
Défauts et avertissements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
Défauts module accessibles par lecture explicite . . . . . . . . . . . . . . . . . . . . . . . 316
Défauts voie accessibles par lecture explicite . . . . . . . . . . . . . . . . . . . . . . . . . . 317
Liste d’erreurs de configuration et de réglage . . . . . . . . . . . . . . . . . . . . . . . . . . 318
Registres en défauts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
Liste des codes d’erreur d’une commande WRITE_CMD . . . . . . . . . . . . . . . . . 324
Commande WRITE_CMD : Erreurs de programmation. . . . . . . . . . . . . . . . . . . 325
Commande WRITE_CMD : Erreurs de communication. . . . . . . . . . . . . . . . . . . 327
Commande WRITE_CMD : Erreurs système . . . . . . . . . . . . . . . . . . . . . . . . . . 328
35009561.01 07/2008
9.6
Chapitre 10
10.1
10.2
Chapitre 11
11.1
Commande WRITE_CMD : Avertissements système . . . . . . . . . . . . . . . . . . . .
Défauts d’écriture explicite d’une commande TRF_RECIPE . . . . . . . . . . . . . .
Modes de marche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Logigrammes des défauts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Défauts variateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Performances du TSX CSY 84 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Performances du TSX CSY 84 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
330
331
332
333
335
337
337
Interface langage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interface PL7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interface langage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Gestion des paramètres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
WRITE_PARAM et READ_PARAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SAVE_PARAM et RESTORE_PARAM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
WRITE_CMD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
WRITE_CMD Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
READ_STS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TRF_RECIPE et MOD_PARAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Liste des variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Variables d’entrée échangées de manière implicite . . . . . . . . . . . . . . . . . . . . .
Variables de sortie échangées de manière implicite . . . . . . . . . . . . . . . . . . . . .
Paramètres de réglage de la fonction SERCOS® . . . . . . . . . . . . . . . . . . . . . .
Paramètres de réglage d’un axe indépendant . . . . . . . . . . . . . . . . . . . . . . . . .
Paramètres de réglage d’un groupe d’axes suiveurs . . . . . . . . . . . . . . . . . . . .
Mots constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
341
342
342
343
345
347
348
349
351
353
354
355
355
356
359
362
363
366
370
Annexes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Liste des fonctions accessibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonctions accessibles pour la voie 0 SERCOS® . . . . . . . . . . . . . . . . . . . . . . .
Fonctions accessibles pour un axe réel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonctions accessibles pour un axe imaginaire . . . . . . . . . . . . . . . . . . . . . . . . .
Fonctions accessibles pour un axe à mesure externe . . . . . . . . . . . . . . . . . . .
Fonctions accessibles pour un groupe d’axes coordonnés. . . . . . . . . . . . . . . .
Fonctions accessibles pour un groupe d’axes suiveurs . . . . . . . . . . . . . . . . . .
Fonctions accessibles pour un profil de came . . . . . . . . . . . . . . . . . . . . . . . . .
371
372
372
373
375
379
382
384
386
388
Partie III Les fonctions spécifiques au TSX CSY 164. . . . . . . . . 389
Présentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389
Chapitre 12
Compatibilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
Compatibilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
35009561.01 07/2008
11
Chapitre 13
Configuration du module TSX CSY 164 . . . . . . . . . . . . . . . . . 393
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
Configuration du module TSX CSY 164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
Configuration des voies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
Chapitre 14
Fonctions spécifiques au TSX CSY 164 . . . . . . . . . . . . . . . . 397
Présentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397
Reconfiguration dynamique des groupes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398
Fonction de surveillance des écarts de position entre axes . . . . . . . . . . . . . . . 401
Chapitre 15
Performances du TSX CSY 164 . . . . . . . . . . . . . . . . . . . . . . . 407
Performances du module TSX CSY 164 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
Index
12
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411
35009561.01 07/2008
A propos de ce manuel
Présentation
Objectif du
document
Ce manuel traite de la mise en oeuvre logicielle de la commande de mouvements
du module SERCOS® TSX CSY 84 / 164.
Ce manuel est partagé en trois partie distincts :
z
z
z
Partie I: cette partie est commune aux deux modules TSX CSY 84 et
TSX CSY164, et traite de l’offre SERCOS® dans les automates Premium,
Partie II : cette partie est commune aux deux modules TSX CSY 84 et
TSX CSY164, et traite des commandes de mouvement de ces modules,
Partie III : cette partie est spécifique au module TSX CSY 164.
Note : tout ce qui s’applique au montage du module TSX CSY 84 est valable pour
le module TSX CSY 164.
Champ
d'application
Document à
consulter
Commentaires
utilisateur
35009561.01 07/2008
La mise à jour de cette documentation prend en compte la fonction "Commande
manuelle" en mode mise au point.
Titre
Référence
Manuel de mise en oeuvre matérielle
TSX DM 57 xx F
Envoyez vos commentaires à l'adresse e-mail techpub@schneider-electric.com
13
A propos de ce manuel
14
35009561.01 07/2008
L’offre SERCOS® dans les
automates Premium
I
Présentation
Objet de
l’intercalaire
Cet intercalaire présente de manière succincte l’architecture SERCOS® et décrit la
méthodologie pour mettre en oeuvre la commande de mouvement SERCOS® dans
les automates Premium.
Note : dans cet intercalaire, tout ce qui s’applique au montage du TSX CSY 84 est
valable pour le TSX CSY 164. De plus, le TSX CSY 84 est prit comme exemple.
Contenu de cette
partie
35009561.01 07/2008
Cette partie contient les chapitres suivants :
Chapitre
Titre du chapitre
Page
1
Architecture SERCOS®
17
2
Méthodologie de mise en oeuvre
27
3
Exemple d’initiation : module TSX CSY 84
33
15
L’offre SERCOS® dans les automates Premium
16
35009561.01 07/2008
Architecture SERCOS®
1
Présentation
Objet du chapitre
Ce chapitre présente de manière succincte la liaison numérique entre un maître et
des esclaves, définie par la norme EN 61491 "Liaison des données sérielles pour la
communication en temps réel entre unités de commande et dispositifs
d’entraînement".
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Introduction
18
Présentation de l’architecture SERCOS®
20
Evolution des modules TSX CSY •4
22
Limitations des services PL7 en fonction des versions des modules
25
17
Architecture SERCOS
Introduction
Liaison
numérique
La liaison numérique entre un module de commande d’axes (maître) et des
variateurs de vitesse intelligents (esclaves) est définie par la norme Européenne EN
61491, concernant les équipements électriques des machines industrielles.
L’utilisation d’une architecture distribuée permet de raccorder les entrées/sorties
application (codeur de position, arrêt d’urgence, ...) directement sur les variateurs
de vitesse, ce qui limite les coûts de câblage.
La liaison par fibre optique permet des échanges à grande vitesse (2 ou 4 MHz) et
assure une immunité aux parasites.
Données
échangées
Identification des
objets échangés
18
Les données échangées via la liaison numérique sont de 2 types :
des données cycliques échangées entre le maître et les esclaves (commande de
position, ...) ou entre les esclaves et le maître (mesure de position, ...).
L’échange de données cycliques, entre le maître et chaque esclave, est limité à
8 objets en lecture et 8 objets en écriture, tous les cycles SERCOS®.
z des données non cycliques : commandes complexes, écriture ou lecture de
paramètres, ...
Pour chaque cycle, ces échanges s’effectuent au moyen de 2 octets réservés en
lecture et 2 octets réservés en écriture. Plusieurs cycles sont donc nécessaires
pour échanger un objet (par exemple, pour effectuer la lecture d’un paramètre).
z
Tous les objets sont accessibles au travers d’un numéro d’identification : IDN.
La norme permet d’identifier 31768 objets, parmi lesquels elle en spécifie environ
300 (par exemple, IDN 40 = valeur de la vitesse).
Tous les objets comprennent les champs suivants : Nom (64 caractères au
maximum), attribut, unité, valeur maximale, valeur minimale, valeur.
35009561.01 07/2008
Architecture SERCOS
Modes de
marche
Les modes de marches du bus suivent les 5 phases suivantes :
Au démarrage
Phase
Mode de marche
Phase 0
Test du bus en anneau. Les variateurs de vitesse sont en mode répéteur.
Phase 1
Détermination des esclaves présents sur le bus.
Phase 2
Configuration système des variateurs de vitesse.
Phase 3
Programmation des échanges cycliques.
Paramétrage des variateurs de vitesse.
En fonctionnement normal
Phase
Mode de marche
Phase 4
Echanges cycliques actifs.
Chaque variateur de vitesse servant de répéteur sur le bus, une coupure
d’alimentation, un défaut de communication, un défaut sur l’un des variateur de
vitesse ou la coupure du bus provoque le passage en phase 0.
Note : Certains paramètres (IDN) ne sont accessibles qu’en phase 3 (se reporter
à la norme EN 61491). Les fonctions GetActualPhase, GetCommandedPhase et
SetCommandedPhase permettent de connaître la phase en cours et de se
positionner en phase 3.
35009561.01 07/2008
19
Architecture SERCOS
Présentation de l’architecture SERCOS®
Synoptique
Le synoptique de l’architecture SERCOS® est le suivant
Module de commande d’axes
TSX CSY 84 / 164
Bus en anneau
Variateurs
de vitesse
Moteurs
PL7 Junior/Pro + UniLink
Présentation de
l’offre Premium
20
L’offre Premium se compose :
de la gamme des automate Premium (rack, alimentation, processeur, ...) :
TSX/PCX/PMX 57 version logicielle ≥ V3.3 minimum,
z de modules de commande d’axes TSX CSY 84 peuvant piloter jusqu’à 8
variateurs de vitesse, au travers du bus en anneau,
z de la gamme des variateurs de vitesse Lexium 17S (4 A à 56 A) : LXM 17S,
z de la gamme de moteurs : BPH...,
z du logiciel UniLink, qui permet de paramétrer et de régler les variateurs de
vitesse.
z du logiciel PL7 Junior/Pro version minimum SV 3.4 + complément fonctionnel
C ou SV > 3.4 pour le TSX CSY 84,
z du logiciel PL7 Junior/Pro version minimum SV 4.3 + Add-on Motion
TSX CSY 164 ou SV ≥ 4.4 pour le TSX CSY 164.
z
35009561.01 07/2008
Architecture SERCOS
Synoptique
fonctionnel
Le synoptique suivant présente les différentes fonctions réalisées par le module de
commande d’axes et par les variateurs de vitesse :
UniLink
PL7 Junior/Pro
Automate
TSX/PCX/PMX
57
Programme
application
TSX CSY 84 / 164
Bus X
Calcul de trajectoire
Interpolation
Variateur de
vitesse
Lexium 17S
Boucle de position
Moteur
BPH
Boucle de vitesse
Boucle courante
Conversion de
puissance
Bus en anneau
Vitesse
Position
Note : Il est possible d’utiliser un variateur de vitesse, autre que ceux proposés
dans la gamme Premium. Dans ce cas, il sera configuré par son logiciel de
configuration et non par UniLink.
Fonctions
réalisées par les
différents
modules
Le module de commande d’axes TSX CSY 84 / 164 réalise le calcul de trajectoire
et l’interpolation de plusieurs axes.
Le variateur de vitesse gère les boucles de position, de vitesse et de couple. Il
assure également la conversion de puissance afin de piloter le moteur. Les
informations du codeur sont envoyées au variateur de vitesse (position courante,
vitesse en cours).
Les échanges entre l’automate et le module de commande d’axes s’effectuent au
travers du bus X en fond de rack
Les échanges entre le module de commande d’axes et les variateurs utilisent le bus
en anneau SERCOS®.
35009561.01 07/2008
21
Architecture SERCOS
Evolution des modules TSX CSY •4
22
35009561.01 07/2008
Architecture SERCOS
Présentation
La version du module est affichée :
z sur l’étiquette se trouvant sur le côté du module,
z dans la zone module des écrans de mise au point en mode connecté.
CSY 84
V1.1
CSY 84
V1.2
CSY 84
V1.3
CSY 164
V1.0
CSY 164
V1.1
Possibilité de fermer la boucle
de position via un codeur
incrémental ou SSI sur les
variateurs Lexium 17S et
17HP (1)
(Non documenté)
X
X
X
X
X
Possibilité de commuter la
commande position en couple
(1) et (2)
(Non documenté)
X
X
X
X
X
Possibilité de commuter la
commande position en
commande vitesse (1) et (2)
(Non documenté)
X
X
X
X
X
Lire ou écrire les paramètres
du variateur
X
X
X
X
X
Boucle de position avec
codeur externe (1)
X
X
X
X
X
Mode Torque (1)
X
X
X
X
X
Mode Vitesse (1)
X
X
X
X
X
X
Mode Manuel (4)
Référence
TRF_RECIPE, p. 197
X
X
X
Mode manuel, p. 140
Comportement sur défaut ou
dévalidation d’un axe
indépendant
(FREEWHEEL_STOP) (3))
X
X
X
Paramètres de réglage d’un
axe indépendant, p. 363
Propagation des arrêts dans
un groupe suiveur
X
X
X
Paramètres de réglage d’un
groupe d’axes suiveurs,
p. 366
Fonction d’alignement des
pentes d’arrêts d’urgence
X
X
X
Fonction d’alignement des
pentes d’arrêt d’urgence,
p. 247
Choix du comportement
d’arrêt sur ordre de
verrouillage
X
X
X
Comportement sur
dévalidation d’un axe, p. 224
35009561.01 07/2008
23
Architecture SERCOS
CSY 84
V1.1
CSY 84
V1.2
CSY 84
V1.3
CSY 164
V1.0
CSY 164
V1.1
Référence
Arrêt d'un axe membre d'un
groupe suiveur à une position
absolue après un Unlink
X
X
Fonction "MoveQueue",
p. 165
Arrêt d'un axe membre d'un
groupe suiveur à une position
absolue
X
X
Fonction "MoveImmed",
p. 163
Fonction "activation de suivi
sur cible"
X
X
Fonction "activation de suivi
sur cible", p. 178
Service compteur de Modulo
X
X
Service compteur de Modulo,
p. 170
Passage des paramètres ACC
et DEC dans le MOVE
X
X
Arrêt de suivi (Unlink) du
groupe suiveur déclenché par
un trigger, p. 182
et
Fonction "MoveImmed",
p. 163
Arrêt de suivi (Unlink) du
groupe suiveur déclenché par
un trigger
X
X
Arrêt de suivi (Unlink) du
groupe suiveur déclenché par
un trigger, p. 182
Configuration dynamiques des
voies indépendantes
X
X
Configuration des voies,
p. 395
Reconfiguration dynamique
des groupes
X
X
Reconfiguration dynamique
des groupes, p. 398
Fonction de surveillance des
écarts entre axes
X
X
Fonction de surveillance des
écarts de position entre axes,
p. 401
(1) Nécessite une modification des fichiers des modules TSX CSY 84/164
(Sercos.cfg).
(2) Nécessite une version minimale pour les variateurs Lexium ( MHDS xxxxN 00 ≥
SV 1.3, MHDA xxxx ≥ SV 1.4 ) pas de restriction pour les Lexium HP et Lexium
option AS.
(3) Nécessite une version minimale pour les variateurs Lexium MHDx 5.51.
(4) Nécessite la version PL7 SV4.3 minimale pour obtenir les écrans de mise au
point.
24
35009561.01 07/2008
Architecture SERCOS
Limitations des services PL7 en fonction des versions des modules
Illustration
PL7 3.4 +
complément
fonctionel C
Configuration TSX CSY 84
PL7 4.1
PL7 4.2
PL7 4.3
PL7 4.3 +
Add-On
Motion
X
X
X
X
Ecrans de Mise au point TSX CSY 84
X
X
X
X
Ecrans de réglage TSX CSY 84
X
X
X
X
X
X
Ecrans de mode manuel TSX CSY 84
Configuration du TSX CSY 164
35009561.01 07/2008
X
PL7 4.0 +
Add-On
Motion
X
25
Architecture SERCOS
26
35009561.01 07/2008
Méthodologie de mise en oeuvre
2
Présentation
Objet du chapitre
Ce chapitre décrit la méthodologie globale pour mettre en oeuvre un mouvement
d’axe indépendant ou d’axes interpolés.
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Introduction
28
Mise en oeuvre d’un axe indépendant
30
Mise en oeuvre d’un groupe d’axes coordonnés ou suiveurs
32
27
Méthodologie de mise en oeuvre
Introduction
Fonctionnalités
du module
TSX CSY 84
Le module TSX CSY 84 permet de réaliser les fonctionnalités suivantes :
8 axes réels connectés à un variateur de vitesse (voies 1 à 8),
z 4 axes imaginaires (voies 9 à 12),
z 4 axes à entrée de mesure externe (voies 13 à 16),
z 4 groupes d’axes coordonnés (voies 17 à 20). Chaque groupe permet
l’interpolation linéaire de 2 à 8 axes,
z 4 groupes d’axes suiveurs (voies 21 à 24). Chaque groupe peut être composé au
maximum de 7 axes : 1 axe maître et 6 axes esclaves,
z
Note : Le module TSX CSY 84 propose également 7 profils de came (voies 25 à
31).
Fonctionnalités
du module
TSX CSY 164
Le module TSX CSY 164 permet de réaliser les fonctionnalités suivantes :
16 axes indépendant (voies 1 à 16),
Les voies 1 à 16 peuvent indifféremment supporter soit une fonction axe réel, soit
une fonction axe imaginaire, soit une fonction consigne externe,
z 4 groupes d’axes coordonnés (voies 17 à 20). Chaque groupe permet
l’interpolation linéaire de 2 à 8 axes,
z 4 groupes d’axes suiveurs (voies 21 à 24). Chaque groupe peut être composé au
maximum de 7 axes : 1 axe maître et 6 axes esclaves,
z 7 profils de came (voies 25 à 31).
z
Note : Le module TSX CSY 84 / 164 propose également 7 profils de came (voies
25 à 31).
Axe réel
Un axe réel est un axe physique qui pilote un variateur de vitesse au travers du bus
en anneau SERCOS®.
Axe imaginaire
Un axe imaginaire n’est pas un axe physique. Il peut être utilisé pour coordonner les
mouvements de plusieurs axes physiques. Par exemple, un axe imaginaire peut
être l’axe maître d’un groupe suiveurs.
Un axe imaginaire peut également être utilisé en phase de réglage ou de mise au
point pour simuler un axe réel maître indépendamment du procédé.
28
35009561.01 07/2008
Méthodologie de mise en oeuvre
Axe à mesure
externe
Un axe à mesure externe permet de remonter au module une information de
position externe. Typiquement le module TSX CSY 84 / 164 a besoin d’effectuer un
suivi de position à partir d’un codeur piloté par un mécanisme externe et raccordé
sur l’entrée de position auxiliaire du variateur de vitesse.
Groupe d’axes
coordonnés
Un groupe d’axes coordonnés se compose d’axes qui se déplacent en coordination
les uns des autres. Un des axes du groupe, défini comme le maître de la
coordination, servira de référence en vitesse pour le déplacement du groupe.
L’accélération et la vitesse des autres axes coordonnés seront calculés pour que
tous les axes effectuent leur déplacement en même temps.
Groupe d’axes
suiveurs
35009561.01 07/2008
Un groupe d’axes suiveurs se compose d’un axe maître et d’axes esclaves qui
suivent les mouvement de l’axe maître. Il existe 2 manière de suivre l’axe maître :
z en mode ratio : chaque axe esclave suit l’axe maître suivant un rapport défini en
configuration et appelé Rapport suiveur. Par exemple, la position de l’esclave est
égale à celle du maître multiplié par un rapport x,
z en mode came : les axes esclaves suivent l’axe maître suivant un profil de came.
Un profil de came permet de réaliser une came électronique, afin de simplifier la
programmation de mouvements complexes. Une table de points permet de définir
la position de l’esclave en fonction de celle du maître.
29
Méthodologie de mise en oeuvre
Mise en oeuvre d’un axe indépendant
Introduction
Un axe indépendant peut être soit un axe réel connecté à un variateur de vitesse,
soit un axe imaginaire, soit un axe à mesure externe.
Les groupes d’axes suiveurs ou coordonnés sont composés d’un ensemble d’axes
indépendants (donc réel, imaginaire ou à mesure externe).
Méthodologie de
mise en oeuvre
d’un axe réel
Avant de mettre en oeuvre un axe réel, il faut que la voie 0 soit valide (tous les bits
ALLOW de la voie 0 : %Qxy.0.18 et %Qxy.0.26 à %Qxy.0.31 sont à l’état 1).
La méthodologie de mise en oeuvre d’un axe réel s’effectue en 3 phases :
Phase 1 : configuration du variateur de vitesse, en utilisant le logiciel UniLink,
z Phase 2 : configuration du module TSX CSY 84 / 164, en utilisant l’éditeur de
configuration PL7 (déclaration du module et configuration des paramètres pour
tous les axes utilisés),
z Phase 3 : écriture du programme application, transfert de ce programme dans
l’automate et mise au point de l’application.
z
Note : La validation du variateur par le logiciel Unilink inhibe les commandes du
module vers le variateur. Aussi, est-il nécessaire de dévalider le variateur avant de
quitter le logiciel Unilink.
Méthodologie de
mise en oeuvre
d’un axe
imaginaire
Un axe imaginaire n’est pas connecté à un variateur de vitesse (ce n’est pas un axe
physique). En dehors des opérations liées au variateur de vitesse qui n’existe pas,
la mise en oeuvre d’un axe imaginaire s’effectue de la même manière que pour un
axe réel.
Méthodologie de
mise en oeuvre
d’une entrée de
mesure externe
Une entrée de mesure externe a beaucoup moins de fonctions que les autres types
d’axes indépendants. Sa mise en oeuvre est identique à celle d’un axe réel ou
imaginaire dans lequel seule l’information de position est à configurer. Toutes les
opérations liées au variateur de vitesse ou à la programmation d’un mouvement
n’existe donc pas.
30
35009561.01 07/2008
Méthodologie de mise en oeuvre
Synoptique
Début
Mode local (Conception)
Méthodologie de
mise en oeuvre
d’un axe réel
Déclaration du module
dans la configuration
automate
PL7 Junior/Pro
Editeur de
configuration
PL7 Junior/Pro
Configuration des
fonctions et paramétrage Editeur de
configuration
des axes utilisés
Programmation des
mouvements dans
l’application globale
UniLink
Configuration des
paramètres du variateur
de vitesse et du moteur
résolveur
PL7 Junior/Pro
Editeur de
programme
Mode connecté
PL7 Junior/Pro
Transfert de l’application
Mode Transfert
dans la mémoire de
l’automate
Phase 2
Réglage des paramètres PL7 Junior/Pro
au travers de codes
opératoires (paramètres
communs, module et
variateurs de vitesse)
Tests et mise au point
(variateurs de vitesse et
bus en anneau)
Mode connecté
Chargement des
paramètres des drives
dans l’automate.
Edition du dossier
35009561.01 07/2008
Exploitation
Phase 1
Réglage des paramètres
des variateurs de vitesse.
Paramètres sauvegardés
dans les variateurs ou
dans l’automate
PL7 Junior/Pro
Mode mise au point
UniLink
UniLink
Oscilloscope
PL7 Junior/Pro
Editeur de documentation
Phase 3
PL7 ou pupitre
de contrôle
Fin
31
Méthodologie de mise en oeuvre
Mise en oeuvre d’un groupe d’axes coordonnés ou suiveurs
Groupe d’axes
coordonnés
Les axes coordonnés sont des axes réels ou imaginaires. Mettre en oeuvre un
groupe d’axes coordonnés consiste donc à mettre en oeuvre les axes réels
(méthodologie décrite pages précédentes) puis le groupe.
Groupe d’axes
suiveurs
Dans un groupe d’axes suiveurs, l’axe maître peut être réel, imaginaire ou à mesure
externe et les axes esclaves peuvent être réels ou imaginaires. La mise en oeuvre
d’un groupe d’axes suiveurs revient donc à mettre en oeuvre les axes indépendants
qui composent ce groupe, suivant la méthodologie décrite aux pages précédentes,
puis le groupe.
32
35009561.01 07/2008
Exemple d’initiation :
module TSX CSY 84
3
Présentation
Objet du chapitre
Ce chapitre décrit un exemple de mise en oeuvre d’une application de commande
de mouvement, qui utilise l’offre SERCOS® des automates Premium.
Note : le module TSX CSY 84 est prit en exemple. Tout ce qui s’applique à la
configuration du module TSX CSY 84 est valable pour le module TSX CSY 164.
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
Sujet
Description de l’exemple
35009561.01 07/2008
Page
34
Description de la trajectoire
36
Description des commandes en mode manuel
37
Pré-requis et méthodologie
38
Configuration du variateur de vitesse
39
Configuration du module TSX CSY 84
40
Symbolisation des variables E/S
43
Symbolisation des variables Mémoires
44
Programmation du traitement préliminaire
45
Programmation du Grafcet
46
Programmation des transitions
47
Programmation des actions
49
Programmation du traitement postérieur
52
Transfert du programme
56
Réglage des paramètres
57
Présentation du mode Mise au point
59
33
Exemple d’initiation : module TSX CSY 84
Description de l’exemple
Introduction
Cet exemple est donné à titre didactique. Il vous permettra de suivre toutes les
phases de mise en oeuvre d’une commande d’axes TSX CSY 84, sans avoir besoin
pour cela de lire toute la documentation.
Dispositif de
transfert
Un dispositif de transfert assure l’évacuation des pièces en sortie d’usinage. Ce
dispositif se compose d’une pince pouvant se déplacer dans l’espace suivant un axe
(axes X, Y) parallèle au sol.
Dès qu’une pièce se présente sur le tapis A d’évacuation, la pince va automatiquement la chercher pour la déposer sur le tapis B ou sur le tapis C selon le type de
pièce. Ensuite, la pince retourne en position d’attente pour une future prise dès
qu’une nouvelle pièce usinée est détectée.
Illustration
C1
C3
Machine
d’usinage
C2
C4
Tapis A
Tapis B
Tapis C
34
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Entrées/Sorties
Grafcet de
l’application
Les entrées/sorties sont les suivantes :
C1
cellule de détection de présence de pièce usinée
C2
capteur d’identification du type de pièce
C3
capteur de détection pince ouverte / pince fermée
C4
cellule de détection bord de pièce (située dans la pince), raccordée à l’entrée
événement du coupleur
O/F
pince : commande d’ouverture / fermeture de la pince
Le Grafcet de l’application est le suivant :
0
1
Prise d’origine
Axes référencés
2
Déplacement à la position d’attente
Détection d’une pièce usinée
3
Déplacement vers le tapis A
Détection bord de pièce et pince à l’arrêt
4
Fermeture pince
5
Pièce type 1 et pince fermée
Déplacement sur tapis B
Pince à l’arrêt
6
Pièce type 2 et pince fermée
8
Déplacement vers le tapis C
Pince à l’arrêt
Ouverture pince
Pince ouverte
35009561.01 07/2008
35
Exemple d’initiation : module TSX CSY 84
Description de la trajectoire
Illustration de la
trajectoire
Le diagramme suivant décrit la trajectoire :
4
Y_LMAX
Tapis B
Tapis A
3
5
Position d’attente
2
7
6
Tapis C
1
X_LMIN
X_LMAX
Y_LMIN
Description
36
1
Prise d’origine à la vitesse Vp0
2
Déplacement à la vitesse Vret à la position d’attente (Xatt, Yatt) avec arrêt
3
Déplacement vers le tapis A (XA, YA) jusqu’à détection de la pièce usinée à la vitesse
VA
4
Déplacement à la vitesse VB sur le tapis B (XB, YB) avec arrêt
6
Déplacement à la vitesse VC sur le tapis C (XC, YC) avec arrêt
5, 7
Déplacement à la vitesse Vret à la position d’attente (Xatt, Yatt) avec arrêt
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Description des commandes en mode manuel
Face avant de
dialogue
opérateur
Les commandes suivantes regroupées sur une face avant, permettent de piloter le
mobile en manuel lorsque l’installation est en défaut. Les commandes et les voyants
sont gérés par des bits internes.
Manu
Sélection axe
Départ
cycle
Prise
d’origine
Arrêt
cycle
Arrière
Ouverture
pince
Description des
commandes
z
z
z
z
z
z
z
z
z
z
z
35009561.01 07/2008
Défaut
X Y
Auto
Acq.
Défaut
Avant
Arrêt
d’urgence
Fermeture
pince
Auto / Manu : commutateur de sélection du mode de fonctionnement.
Départ cycle : exécution du cycle automatique.
Arrêt cycle : arrêt du cycle automatique.
Sélection axe X / Y : sélection de l’axe à piloter en mode manuel.
Prise d’origine : prise d’origine manuelle sur l’axe sélectionné.
Avant / Arrière : commande de déplacement manuel dans le sens positif ou
négatif, de l’axe sélectionné.
Défaut : voyant regroupant l’ensemble des défauts matériels et application.
Acq. défaut : commande d’acquittement des défauts.
Arrêt d’urgence : arrêt immédiat du mobile quel que soit le mode sélectionné.
Ouverture pince : commande d’ouverture de la pince.
Fermeture pince : commande de fermeture de la pince.
37
Exemple d’initiation : module TSX CSY 84
Pré-requis et méthodologie
Pré-requis
Méthodologie
Afin de ne décrire que les fonctions spécifiques à la commande d’axes, on
supposera que les opérations suivantes sont déjà effectuées :
z pour TSX CSY 84 : que le logiciel PL7 de version minimum V4.3,
z Version TSX CSY 84 : V1.2 minimum (intégrant la fonction "Mode manuel"),
z le logiciel UniLink est installé,
z l’installation matérielle est réalisée.
La mise en oeuvre des modulse TSX CSY 84 nécessite :
la configuration du variateur de vitesse Lexium 17S, réalisée par le logiciel
UniLink,
z la configuration du module TSX CSY 84, réalisée par le logiciel PL7 .
z
38
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Configuration du variateur de vitesse
Connexion au
variateur de
vitesse
L’accès au logiciel UniLink visualise l’écran suivant :
COM1
COM2
Offline
Disconnect
Interfaces
Cliquer sur COM1 ou COM2 pour se connecter au variateur de vitesse (en fonction
du port série utilisé sur le terminal de programmation pour se raccorder au variateur
de vitesse).
Configuration du
moteur et de
l’adresse
SERCOS®
35009561.01 07/2008
Pour configurer le moteur et l’adresse SERCOS®, veuillez vous reporter au manuel
utilisateur du logiciel UniLink.
39
Exemple d’initiation : module TSX CSY 84
Configuration du module TSX CSY 84
Déclaration
logicielle de la
configuration
automate
Lancer le logiciel PL7, sélectionner la commande Fichier / Nouveau, choisir un
processeur Premium et cocher l’option Grafcet.
A partir du Navigateur Application, accéder à l’éditeur de configuration. Pour cela :
z ouvrir le dossier Station (double cliquer sur l’icône ou cliquer sur son attache),
z ouvrir le dossier Configuration (double cliquer sur l’icône ou cliquer sur son
attache),
z double cliquer sur l’icône Configuration matérielle.
Sélectionner ensuite chaque constituant de la configuration automate. Les choix
suivants ont été faits dans cette application :
z rack 0 et rack 1 : TSX RKY 8E,
z processeur : TSX P57 453,
z modules d’alimentation : TSX PSY 5500 pour le rack 0,
z module de commande d’axes : TSX CSY 84 (V1.2 minimum) à la position 4 du
rack 0.
Illustration de l’écran de configuration :
Configuration
TSX 57453 V5.1...
XMWI
XTI..
4
1
0
P
S
Y
5
5
0
0
T
S
X
5
7
4
5
3
5
6
C
S
Y
8
4
1
Le temps de cycle du processeur doit être supérieur à 8 ms (2 x Temps de cycle du
module).
40
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Configuration
des axes
Le tableau ci-dessous décrit la marche à suivre pour configurer des axes :
Etape Action
1
Double cliquer sur le module TSX CSY 84 (position 4 du rack 0), afin d’afficher
l’écran de configuration.
2
Sélectionner dans la zone de niveau voie : 0 Réseau, puis la fonction Bus SERCOS
®.
3
Saisir les valeurs des paramètres :
TSX CSY 84 [RACK0 POSITION 4]
Configuration
Désignation : MOD.CDE AXE 8 VOIES N4
Symbole :
Voie :
Fonction :
Bus SERCOS ®
0 Réseau
Voies configurées : 0, 1, 2, 17
Tâche :
MAST
Paramètres constructeur
Temps de cycle : 4000 µs
Puissance optique :66
%
4
Sélectionner dans la zone de niveau voie : 1 Réel, puis la fonction Axe réel.
5
Saisir les valeurs des paramètres :
TSX CSY 84 [RACK0 POSITION 4]
Configuration
Désignation : MOD.CDE AXE 8 VOIES N4
Symbole :
Voie :
Fonction :
Axe réel
1 Réel
Voies configurées : 0, 1, 2, 17
Butées
Contrôle de position
Position max.
3.402823e+038
Position min.
-3.402823e+038
Vitesse max.
6.000000e+003
Accélération max 5.000000e+006
Décélération max 5.000000e+005
Ctrl. de position en validation
Actif
Tolérance
0.000000e+000
6
35009561.01 07/2008
Tâche :
MAST
Unités
Type
Position
Vitesse
Accélération
Linéaire
µm
mm/min
µm/s²
Facteur d’échelle
Numérateur 1.000000e+000
Dénominateur 1.000000e+000
Mouvement
Modulo
Modulo max. 3.402823e+038
Modulo min. -3.402823e+038
Fenêtre au point 1.000000e+003
5.000000e+005
Accélération
Décélération
5.000000e+005
Type d’accélération
Rectangle 100 %
Répéter l’étape 3,pour la saisie des paramètres du deuxième axe (2 Réel).
41
Exemple d’initiation : module TSX CSY 84
Etape Action
7
Sélectionner dans la zone de niveau voie : 17 Coordonés, puis la fonction Groupe
d’axes coordonnés.
8
Saisir les valeurs des paramètres :
TSX CSY 84 [RACK0 POSITION 4]
Configuration
Désignation : MOD.CDE AXE 8 VOIES N4
Symbole :
Voie :
Fonction :
Groupe d’axes coordonnés
17 Coordonnés
Voies configurées : 0, 1, 2, 17
Tâche :
MAST
Fct.spéciale
Axes
X
1
Y
2
Z
N
A
N
B
N
C
N
D
N
E
N
Active
Numéro de fonction0
Adresse table %K. 0
9
Valider la saisie par la commande Edition / Valider ou par l’icône
10
Au niveau de l’écran de base de l’éditeur de configuration, valider la configuration
par la commande Edition / Valider ou par l’icône :
Note : La vitesse max. (VMax) est donnée pour un moteur 6000 tours/min, avec
un déplacement de 1 mm / tour.
42
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Symbolisation des variables E/S
Saisie des
symboles
L’accès à la saisie des symboles s’effectue par un double clic dans le Navigateur
Application, successivement sur les icônes Variables et E/S.
Variables
Paramètres E/S
Repère
%I4.0
%I4.0.1
%I4.0.2
%I4.0.3
%I4.0.4
%I4.0.5
%I4.0.6
%I4.0.7
%I4.0.8
%I4.0.9
%I4.0.10
%I4.0.11
%I4.0.12
%I4.0.13
%I4.0.14
%I4.0.15
%I4.0.16
%I4.0.17
%I4.0.18
%I4.0.19
%I4.0.20
%I4.0.21
%I4.0.22
%I4.0.23
%I4.0.24
%I4.0.25
%I4.0.26
%I4.0.27
%I4.0.28
%I4.0.29
%I4.0.30
%I4.0.31
%I4.0.32
%I4.0.33
%I4.0.34
%IW4.0
%IW4.0.1
%IW4.0.2
%Q4.0
%Q4.0.1
%Q4.0.2
Symboles des
variables
internes
35009561.01 07/2008
Adr 4 : TSX CSY 84
Type
Symbole
EBOOL Sercos_ramping
EBOOL Sercos_steady
EBOOL Sercos_stopping
EBOOL Sercos_profile_end
EBOOL Sercos_in_position
EBOOL Sercos_axis_homing
EBOOL Sercos_axis_homed
EBOOL Sercos_axis_not_following
EBOOL Sercos_holding
EBOOL Sercos_resuming
EBOOL Sercos_drive_enable
EBOOL Sercos_drive_diag
EBOOL Sercos_drive_warning
EBOOL Sercos_drive_fault
EBOOL Sercos_drive_disabled
EBOOL Sercos_axis_summary_fault
EBOOL Sercos_axis_comm_ok
EBOOL Sercos_axis_is_linked
EBOOL
EBOOL
EBOOL Sercos_axis_at_target
EBOOL Sercos_axis_pos_limit
EBOOL Sercos_axis_neg_limit
EBOOL
EBOOL
EBOOL
EBOOL Sercos_drive_realtime_bit1
EBOOL Sercos_drive_realtime_bit2
EBOOL Sercos_axis_hold
EBOOL Sercos_axis_halt
EBOOL Sercos_axis_faststop
EBOOL Sercos_axis_ready
EBOOL Sercos_conf_ok
EBOOL
EBOOL
WORD
WORD
WORD Sercos_param_rpt
EBOOL
EBOOL
EBOOL Sercos_control_acquire
Zone de saisie
Commentaire
Le mouvement accélère ou décélère
Le mouvement a une vitesse uniforme
Le mouvement décélère vers un arrêt
Le mouvement est terminé
La posiion de l’axe est dans la fenêtre au point
L’axe effectue une prise d’origine
La prise d’origine est effectuée correctement
Le variateur ignore le profil de mouvement du contrôleur
L’axe suspend le mouvement
L’axe est en cours de reprise de mouvement
Le variateur est activé
Modification d’un bit de diagnostic SERCOS classe 3
Modification d’un bit de diagnostic SERCOS classe 2
Modification d’un bit de diagnostic SERCOS classe 1
Le variateur est désactivé
Défaut variateur, de communication ou de mouvement
Communication contrôleur / variateur active
L’axe appartient à un groupe d’axe
La position de l’axe est dans la fenêtre au point de la posi
La position de l’axe a atteint la butée logicielle positive
La position de l’axe a atteint la butée logicielle négative
Bit1 temps réel du variateur
Bit2 temps réel du variateur
Maintien du mouvement de l’axe
Arret du mouvement de l’axe
Arret rapide du mouvement de l’axe
La position de l’axe est ok
La position de l’axe a été configuré
Rapport des paramètres
Validation globale des axes
Les variables internes suivantes sont symbolisées :
Repère
Symbole
%MF102
Vit_atteindre
%MF104
Vit_manu
Commentaire
43
Exemple d’initiation : module TSX CSY 84
Symbolisation des variables Mémoires
Saisie des
symboles
44
L’accès à la saisie des symboles s’effectue par un double clic dans le Navigateur
Application, successivement sur les icônes Variables et Mémoire :
Repère
Symbole
%M0
Presence_piece
%M1
Capteur_2
Capteur d’identification de pièce (0 = type 2;
1 = type 1)
%M2
Capteur_3
Capteur pince ouverte / pince fermée
%M3
Auto_manu
Commutateur choix du mode (0 = auto;
1 = manu)
%M4
Depart_cycle
%M5
Arret_cycle
%M6
Selection_x_y
%M7
Po_manu
%M8
Avant
%M9
Arriere
%M10
Acq_defaut
Commentaire
Sélection de l’axe en manu pour déplacement ou PO (1
= x; 0 = y)
%M11
Type_def
%M12
Valid_axes
%M13
Ouv_pince
%M14
Fermeture_pince
%M20
Pince
Commande actionneur ouverture / fermeture pince
%M21
Defaut
Signalisation des défauts
Validation des axes
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Programmation du traitement préliminaire
MAST - Prl
! (* initialisation du graphe *)
IF NOT %M4 OR %S1 THEN SET %S21;END_IF;
!(* initialisation des valeurs de déplacement *)
%MF50:=%MF52:=1000.0; (* position d'attente *)
%MF54:=20000.0; (* déplacement vers tapis b axe x *)
%MF56:=15000.0; (* déplacement vers tapis b axe y *)
%MF58:=20000.0;(* déplacement vers tapis c axe x *)
%MF60:=5000.0;(* déplacement vers tapis c axe y *)
%MF102:=500.0;(* vitesse auto *)
%MF104:=2000.0;(* vitesse manu *)
%MF106:=1000.0;(* vitesse prise origine *)
!(* initialisation des voies 0_1_2 *)
%Q4.0.26:=NOT %S0;
35009561.01 07/2008
45
Exemple d’initiation : module TSX CSY 84
Programmation du Grafcet
CHART - PAGE 0
Grafcet
4
(*INIT*)
0
5
(*fermeture pince*)
1
11
(*validation groupe*)
12
(*validation
groupe*)
2
6
(*move coordonné
vers tapis b*)
10
(*move coordonné
vers tapis c*)
14
(*dévalidation
groupe*)
(*départ cycle*)
(*validation axes x et y*)
(*axes validés*)
(*prise origine axes x et y*)
7
(*axes référencés*)
(*déplacement pos attente
axe indépendant*)
15
3
13
4
7
(*dévalidation
groupe*)
(*détection d’une pièce usinée*)
(*déplacement tapis a*)
15
(*pince ouverte*)
(*détection bord de pièce*)
5
46
(*ouverture pince*)
3
(*ouverture pince*)
(*pince ouverte*)
3
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Programmation des transitions
Transition 0 -> 1
z
%X(0) -> %X(1)
! (*dcy et mode auto et pas de défaut*)
%M4 AND NOT %M3 AND NOT %I4.1.15 AND NOT %I4.2.15
Transition 1 -> 2
z
%X(1) -> %X(2)
! (*validé et in_command*)
%I4.1.10 AND %I4.2.10 AND %I4.1.18 AND %I4.2.18
Transition 2 -> 3
z
%X(2) -> %X(3)
! (*variateurs referencés*)
%I4.1.6 AND %I4.2.6
! (*controle des échanges*)
AND(%M4.1.19=0)AND(%M4.2.19=0)AND NOT %MW4.1:X1 AND NOT
%MW4.2:X1
Transition 3 -> 4
z
%X(3) -> %X(4)
! (*vérification => fin d’instruction et en position*)
%I4.1.3 AND %I4.2.3 AND %I4.1.4 AND %I4.2.4
! (*presence piece*)
AND %M0
! (*controle echanges*)
AND(%M4.1.19=0)AND(%M4.2.19=0)AND NOT %MW4.1:X1 AND NOT
%MW4.2:X1
Transition 4 -> 5
z
%X(4) -> %X(5)
! (*vérification => fin d’instruction et en position*)
%I4.1.3 AND %I4.2.3 AND %I4.1.4 AND %I4.2.4
(*controle échanges*)
AND (%MW4.1.3=0) AND (%MW4.2.3=0) AND NOT %MW4.1:X1
AND NOT %MW4.2:X1
Transition 5 -> 11
z
%X(5) -> %X(11)
! (*identification pièce usinée*)
%M1 AND %M20
Transition 11 -> 6
z
%X(11) -> %X(6)
! (*groupe coordoné validé et in command ?*)
%I4.17.10 AND %I4.17.18
35009561.01 07/2008
47
Exemple d’initiation : module TSX CSY 84
Transition 6 -> 13
z
%X(6) -> %X(13)
! (*vérification => fin d’instruction et en position*)
%I4.1.3 AND %I4.2.3 AND %I4.1.4 AND %I4.2.4
(*controle des échanges*)
AND (%MW4.17.19=0) AND NOT %MW4.17:X1
Transition 13 -> 7
z
%X(13) -> %X(7)
! (*vérification => ch17 in command*)
NOT %I4.17.18
Transition 7 -> 3
z
%X(7) -> %X(3)
! (*pinces ouvertes ?*)
NOT %M2 AND %X7.T>100
Transition 5 -> 12
z
%X(5) -> %X(12)
! (*identification pièce usinée*)
%M2 AND %M20
Transition 12 ->
10
z
%X(12) -> %X(10)
! (*groupe coordoné validé et in command ?*)
%I4.17.10 AND %I4.17.18
Transition 10 ->
14
z
%X(10) -> %X(14)
! (*vérification => fin d’instruction et en position*)
%I4.1.3 AND %I4.2.3 AND %I4.1.4 AND %I4.2.4
(*controle des échanges*)
AND (%MW4.17.19=0) AND NOT %MW4.17:X1
Transition 14 ->
15
z
%X(14) -> %X(15)
! (*vérification => ch17 in command*)
NOT %I4.17.18
Transition 15 -> 3
z
%X(15) -> %X(3)
! (*pinces ouvertes ?*)
NOT %M2 AND %X15.T>100
48
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Programmation des actions
Etape 1
z
%X1 P1
! (*validation voies et variateurs axes 1 et 2*)
SET %Q4.1.10; SET %Q4.1.2; SET %Q4.2.10; SET %Q4.2.2;
Etape 2
z
%X2 P1
! (*prise d’origine voie 2*)
%MW4.2.26 := 6034; (***Prise d'origine***)
%MD4.2.27 := 0; (***Param 1***)
%MD4.2.29 := 0; (***Param 2 ***)
%MF4.2.31 := 1.0; (***1 => sens positif, -1 sens négatif***)
%MF4.2.33 := %MF106; (***vitesse***)
WRITE_CMD %CH4.2;
! (*prise d’origine voie 1*)
%MW4.1.26 := 6034; (***Prise d'origine***)
%MD4.1.27 := 0; (***Param 1***)
%MD4.1.29 := 0; (***Param 2***)
%MF4.1.31 := 1.0; (***1 => sens positif, -1 => sens négatif***)
%MF4.1.33 := %MF106; (***vitesse***)
WRITE_CMD %CH4.1;
Etape 3
z
%X3 P1
! (*voie 2 déplacement absolu*)
%MW4.2.26 := 513; (***Move Immed***)
(***Move type : -1 defaut, 0 ABS_MOVE, 1 INCR_MOVE, 2 CONT_MOVE, 3
ABS_MOVE_POS, 4 ABS_MOVE_NEG***)
%MD4.2.27 := 0;
%MD4.2.29 := 0; (***Param_2***)
%MF4.2.31 := %MF50; (Direction / Cont 1.0, Position / abs***)
%MF4.2.33 := 1000.0; (***Vitesse***)
WRITE_CMD %CH4.2;
! (*voie 1 déplacement absolu*)
%MW4.1.26 := 513; (***Move Immed***)
(***Move type : -1 defaut, 0 ABS_MOVE, 1 INCR_MOVE, 2 CONT_MOVE, 3
ABS_MOVE_POS, 4 ABS_MOVE_NEG***)
%MD4.1.27 := 0;
%MD4.1.29 := 0; (***Param_2***)
%MF4.1.31 := %MF52; (Direction / Cont 1.0, Position / abs***)
%MF4.1.33 := 1000.0; (***Vitesse***)
WRITE_CMD %CH4.1;
35009561.01 07/2008
49
Exemple d’initiation : module TSX CSY 84
Etape 4
z
%X4 P1
! (*voie 1 déplacement absolu*)
%MW4.1.26 := 513; (***Move Immed***)
(***Move type : -1 defaut, 0 ABS_MOVE, 1 INCR_MOVE, 2 CONT_MOVE, 3
ABS_MOVE_POS, 4 ABS_MOVE_NEG***)
%MD4.1.27 := 0;
%MD4.1.29 := 0; (***Param_2***)
%MF4.1.31 := 0.0; (Direction / Cont 1.0, Position / abs***)
%MF.1.33 := %MF102; (***Vitesse***)
WRITE_CMD %CH.1;
! (*voie 2 déplacement absolu*)
%MW4.2.26 := 513; (***Move Immed***)
(***Move type : -1 defaut, 0 ABS_MOVE, 1 INCR_MOVE, 2 CONT_MOVE, 3
ABS_MOVE_POS, 4 ABS_MOVE_NEG***)
%MD4.2.27 := 0;
%MD4.2.29 := 0; (***Param_2***)
%MF4.2.31 := 1000.0; (Direction / Cont 1.0, Position / abs***)
%MF4.2.33 := %MF102; (***Vitesse***)
WRITE_CMD %CH4.2;
Etape 5
z
%X5 P1
! (*fermeture de la pince*)
SET %M20;
Etape 6
z
%X6 P1
! (*voie 17 déplacement absolu*)
%MW4.17.26 := 513; (***Move Immed***)
(*Move type: -1 defaut, 0 ABS_MOVE, 1 INCR_MOVE, 2 CONT_MOVE, 3
ABS_MOVE_POS, 4 ABS_MOVE_NEG*)
%MD4.17.27 := 0;
%MD4.17.29 := 0; (***Param_2***)
%MF4.17.31 := %MF54; (*Position*)
%MF4.17.33 := %MF56; (*Vitesse*)
%MF4.17.35 := %MF102; (*Position*)
%MF4.17.37 := %MF102; (*Vitesse*)
WRITE_CMD %CH4.17;
Etape 7
z
%X7 P1
(*ouverture de la pince*)
RESET %M20;
50
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Etape 10
z
%X10 P1
! (*voie 17 déplacement absolu*)
%MW4.17.26 := 513; (*Move Immed*)
(*Move type : -1 defaut, 0 ABS_MOVE, 1 INCR_MOVE, 2 CONT_MOVE, 3
ABS_MOVE_POS, 4 ABS_MOVE_NEG*)
%MD4.17.27 := 0;
%MD4.17.29 := 0; (*Param_2*)
%MF4.17.31 := %MF58; (*Position *)
%MF4.17.33 := %MF60; (*Vitesse*)
%MF4.17.35 := %MF102; (*Position *)
%MF4.17.37 := %MF102; (*Vitesse*)
WRITE_CMD %CH4.17;
Etape 11
z
%X11 P1
(*enable et in command groupe coordonné*)
SET %Q4.17.2;SET %Q4.17.10;
Etape 12
z
%X12 P1
(*enable et in command groupe coordonné*)
SET %Q4.17.2;SET %Q4.17.10;
Etape 13
z
%X13 P1
(*not in command groupe coordonné*)
RESET %Q4.17.18;
Etape 14
z
%X14 P1
(*not in command groupe coordonné*)
RESET %Q4.17.18;
Etape15
z
%X15 P1
(*ouverture de la pince*)
RESET %M20;
35009561.01 07/2008
51
Exemple d’initiation : module TSX CSY 84
Programmation du traitement postérieur
52
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
MAST - POST
! (*gestion RESET des defauts *)
IF %M10 THEN SET %Q4.0.15;RESET %M10;
ELSE RESET %Q4.0.15;
END_IF;
%M21:=%I4.1.15 OR %I4.2.15;
IF %M21 THEN RESET %M4;END_IF;
! (* initialisation du G7 ET gestion du mode MANU / AUTO disponible depuis
SV1.2 *)
IF RE %M3 AND NOT %MW4.1:X1 AND NOT %MW4.2:X2
THEN SET %S21;
%MW4.1.26:=2572;(*** selection Mode manuel ***)
%MD4.1.27:=1;(*** selection Mode manuel ***)
WRITE_CMD %CH4.1;
%MW4.2.26:=2572;(*** selection Mode manuel ***)
%MD4.2.27:=1;(*** selection Mode manuel ***)
WRITE_CMD %CH4.2;SET %M3;
END_IF;
IF FE %M3 AND NOT %MW4.1:X1 AND NOT %MW4.2:X2
THEN
%MW4.1.26:=2572;(*** selection Mode manuel ***)
%MD4.1.27:=0;(*** selection Mode AUTOMATIQUE ***)
WRITE_CMD %CH4.1;
%MW4.2.26:=2572;(*** selection Mode AUTOMATIQUE ***)
%MD4.2.27:=0;(*** selection Mode manuel ***)
WRITE_CMD %CH4.2;RESET %M3;
END_IF;
IF NOT %M3
THEN JUMP %L10;
END_IF;
! (* ----------------- gestion du mode manuel -----------------*)
(************* mode manuel de la voie x positif **************)
IF %M8 AND %M6 AND %I4.2.25 AND %I4.1.25
THEN SET %Q4.1.4;
ELSE RESET %Q4.1.4
;END_IF;
35009561.01 07/2008
53
Exemple d’initiation : module TSX CSY 84
(************** mode manuel de la voie x negatif *************)
IF %M9 AND %M6 AND %I4.2.25 AND %I4.1.25
THEN SET %Q4.1.5;
ELSE RESET %Q4.1.5;
END_IF;
(*************** mode manuel de la voie y positif ************)
IF %M8 AND NOT %M6 AND %I4.2.25 AND %I4.1.25
THEN SET %Q4.2.4;
ELSE RESET %Q4.2.4;
END_IF;
(*************** mode manuel de la voie y negatif ************)
IF RE %M9 AND NOT %M6 AND %I4.2.25 AND %I4.1.25
THEN SET %Q4.2.5;
ELSE RESET %Q4.2.5;
END_IF;
(************* PO manuel de la voie x **************)
IF RE %M7 AND %M6 AND NOT %MW4.1:X1
THEN
%MW4.1.26:=6034;(*** Prise origine ***)
%MD4.1.27:=0;(*** param 1 ***)
%MD4.1.29:=0;(*** Param 2 ***)
%MF4.1.31:=1.0;(*** Direction ***)
%MF4.1.33:=%MF106;(*** Speed ***)
WRITE_CMD %CH4.1;
END_IF;
(************** PO manuel de la voie y *************)
IF RE %M7 AND NOT %M6 AND NOT %MW4.2:X2
THEN
%MW4.2.26:=6034;(*** Prise origine ***)
%MD4.2.27:=0;(*** Param 1 ***)
%MD4.2.29:=0;(*** Param 2 ***)
%MF4.2.31:=1.0;(*** Direction ***)
%MF4.2.33:=%MF106;(*** Speed ***)
WRITE_CMD %CH4.2;
END_IF;
! (* -------------- arret du cycle en cours --------------*)
%L10:IF %M5 THEN
RESET %Q4.1.29;
RESET %Q4.2.29;
ELSE
SET%Q4.1.29;
SET %Q4.2.29;
RESET %M5;
END_IF;
54
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
! (* -------------- lecture du type de défaut -----------------------------*)
IF %M11 THEN
%MW4.1.26:=5510;
WRITE_CMD %CH4.1;
%MW4.2.26:=5510;
WRITE_CMD %CH4.2;
RESET %M11;
END_IF;
! (* -------------- Devalidation des voies --------------------------------*)
(* devalidation du drive VOIE 1 et 2 *)
IF %M100
THEN
RESET %Q4.1.26;
RESET %Q4.2.26;
RESET %M100;
ELSE SET %Q4.1.26;
SET %Q4.2.26;
END_IF;
!
%L100:
35009561.01 07/2008
55
Exemple d’initiation : module TSX CSY 84
Transfert du programme
Procédure pour
transférer un
programme
Après avoir configuré votre application et saisi votre programme, vous devez
transférer ceux-ci dans la mémoire du processeur automate, en suivant la
procédure suivante :
Etape
56
Action
1
Connectez le terminal à l’automate par la commande AP → Connecter.
2
Activez la commande AP → Transférer.
3
Choisir l’option Console -> automate.
4
Validez le transfert.
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Réglage des paramètres
Introduction
35009561.01 07/2008
En cas de besoin, il peut être intéressant de pouvoir ajuster les paramètres de
configuration.
Pour cela, plusieurs méthodes sont envisageables :
z vous pouvez retouner en mode local et modifier les paramètres directement dans
l’écran de configuration,
z PL7 vous permet également de modifier les paramètres en mode connecté soit
en utilisant :
z les écrans de réglage (méthode développée ci-dessous),
z les fonctions associées aux paramètres de réglage via l’application.
57
Exemple d’initiation : module TSX CSY 84
Procédure de
réglage via les
écrans PL7
Pour effectuer le réglage des paramètres, vous devez réaliser les opérations
suivantes :
Etape Action
1
Accédez à l’’écran de configuration matérielle de l’application.
2
Effectuez un double clic sur le module CSY 84. Vous pouvez également sélectionner
le module et exécuter la commande Edition → Ouvrir le module.
3
Activez la commande Vue → Réglage pour accéder à l’écran de réglage (exemple :
voie 1)
Réglage
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
Axe réel
1 Réel
Voies configurées : 0, 1, 2, 17
Butées
Unités
Contrôle de position
Type
Position max.
3.402823e+038
Position min.
-3.402823e+038 Position
Vitesse max.
6.000000e+003 Vitesse
Tâche :
MAST
Linéaire
µm
µm/s
µm/s²
Accélération max 5.000000e+006 Accélération
Décélération max 5.000000e+006 Facteur d’échelle
Ctrl. de position en validation
Actif
Numérateur 1.000000e+000
Tolérance
0.000000e+000 Dénominateur 1.000000e+000
Mouvement
Modulo
Modulo max.
Modulo min.
Fenêtre au
point
Accélération
Décélération
3.402823e+038
-3.402823e+038
1.000000e+003
5.000000e+005
5.000000e+005
Type d’accélération
Rectangle 100 %
Transférer les paramètres du variateur de vitesse
Sens du transfert
Automate -> Variateur de vitesse
Variateur de vitesse -> Automate
Paramétres
Résultats
Tranfert des paramétres du variateur de vitesse
dans la mémoire automate :
Erreur transfert :
Adresse table
Longueur
4
Transférer
%MW
100
22
Longueur de la table lue : 0
200
Saisissez les modifications éventuelles.
5
Validez les saisies par la commande Edition → Valider ou cliquez sur l’icône
Restauration/
sauvegarde des
paramètres
58
Ce service est disponible pour la voie Réseau, les axes réels, imaginaires et à
mesure externe ainsi que les axes suiveurs. Pour plus d’informations sur ce service,
Reportez au manuel Bases métier, intercalaire Communs métier, Fonctions
RESTORE_PARAM et SAVE_PARAM.
35009561.01 07/2008
Exemple d’initiation : module TSX CSY 84
Présentation du mode Mise au point
Introduction
L’application réalisée puis transférée, il est souvent nécessaire d’effectuer sa mise
au point.
PL7 vous guide dans cette mise au point à l’aide d’outils tels que :
z les écrans de mise au point qui :
z comporte de nombreux indicateurs sur l’état de l’application
z donnent accès au changement d’état de certaines variables
Note : La fonction mise au point nécessite d’être en mode connecté.
Procédure de
mise au point
Vous pouvez effectuer la mise au point du programme en procédant de la manière
suivante :
Etape
35009561.01 07/2008
Action
1
Mettez l’automate en RUN.
2
Affichez l’écran de mise au point du module TSX CSY 84 / 164.
Remarque : Vous pouvez visualiser simultanément un éditeur langage afin de
suivre l’évolution de l’application.
3
Lancez l’exécution du programme.
59
Exemple d’initiation : module TSX CSY 84
60
35009561.01 07/2008
Commande de mouvement
commune aux modules
TSX CSY 84 / 164
II
Présentation
Objet de
l’intercalaire
Cet intercalaire présente les modules TSX CSY 84 / 164 et décrit la mise en oeuvre
d’une commande de mouvement avec ces modules.
Note : dans cet intercalaire, tout ce qui s’applique au montage du TSX CSY 84 est
valable pour le TSX CSY 164. De plus, le TSX CSY 84 est prit comme exemple.
Contenu de cette
partie
35009561.01 07/2008
Cette partie contient les chapitres suivants :
Chapitre
Titre du chapitre
Page
4
Présentation fonctionnelle des modules TSX CSY 84 / 164
63
5
Configuration du module TSX CSY 84
79
6
Programmation des modules TSX CSY 84 / 164
99
7
Réglage des modules TSX CSY 84 / 164
185
8
Mise au point des modules TSX CSY 84 / 164
275
9
Diagnostic et maintenance
295
10
Interface langage
341
11
Annexes
371
61
Commande de mouvement commune aux modules TSX CSY 84 / 164
62
35009561.01 07/2008
Présentation fonctionnelle des
modules TSX CSY 84 / 164
4
Présentation
Objet du chapitre
Ce chapitre décrit les fonctionnalités des modules TSX CSY 84 / 164 et les fonctions
qu’ils permettent de réaliser.
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Fonctions des modules TSX CSY 84 / 164
64
Fonction "SERCOS®"
66
Fonction "axe réel"
67
Fonction "axe imaginaire"
68
Fonction "axe à mesure externe"
69
Notion de groupe
70
Fonction "groupe d’axes coordonnés"
72
Fonction "groupe d’axes suiveurs"
75
Fonction "profil de came"
77
63
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonctions des modules TSX CSY 84 / 164
Présentation du
module
TSX CSY 84
z
Présentation du
module TSX CSY
164
z
Echanges d’une
commande
Le module TSX CSY 84 supporte 5 types de fonctions métier :
Fonction SERCOS®, réalisée par la voie 0 (anneau SERCOS®),
z Fonction Axes indépendants réalisée par les voies 1 à 16,
z Axe réel réalisée par les voies 1 à 8,
z Axe imaginaire réalisée par les voies 9 à 12,
z Axe à mesure externe réalisée par les voies 13 à 16,
z Fonction Groupes d’axes coordonnés, réalisée par les voie 17 à 20,
z Fonction Groupe d’axes suiveurs, réalisée par les voies 21 à 24,
z Fonction Profil de came, réalisée par les voies 25 à 31.
Le module TSX CSY 164 supporte 5 types de fonctions métier :
Fonction SERCOS®, réalisée par la voie 0 (anneau SERCOS®),
z Fonction Axes indépendants (axes réels, imaginaires, à mesure externe),
réalisée par les voies 1 à 16,
z Fonction Groupes d’axes coordonnés, réalisée par les voie 17 à 20,
z Fonction Groupe d’axes suiveurs, réalisée par les voies 21 à 24,
z Fonction Profil de came, réalisée par les voies 25 à 31.
Pour chacune des fonctions métier (Anneau SERCOS®, Axe indépendant, Groupe
coordonné, Groupe suiveur et Profil de came), les échanges s’effectuent au rythme
de 1 commande par voie tous les 2 cycles de la tâche automate MAST.
Les 32 bits de commande suivants permettent d’autoriser et de valider les
commandes :
z 16 bits CONTROL, actifs sur front montant (%Qxy.i.0 à %Qxy.i.15),
z 16 bits ALLOW, actifs sur front descendant (%Qxy.i.16 à %Qxy.i.31).
Optimisation des
performances
Les échanges implicites (%I, %Q) sont réalisés pour l’ensemble des voies, à chaque
cycle de la tâche MAST. Dans le but d’optimiser les performances, il est
recommandé quand c’est possible, de privilégier les échanges implicites (%Q),
par rapport aux échanges explicites (WRITE_CMD).
Important
Les modules TSX CSY 84 et TSX CSY 164 sont obligatoirement configurés en
tâche MAST.
64
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Représentation
graphique des
échanges
Sur le TSX CSY 84, les échanges d’une commande WRITE_CMD s’effectuent
suivant le principe suivant :
Processeur
Tâche MAST
Module TSX CSY 84 / 164
32 voies
Tâche
Interprétation des
commandes
Bus en
anneau
WRITE_CMD(1,...)
WRITE_CMD(2,...)
Voie 1
32 registres (1)
Voie 2
Voie n
16 registres
MoveQueue (2)
Tâche Calcul de trajectoire et Interpolation
Voie 0
WRITE_CMD(0,...)
Temps
de
cycle
= 4 ms
(1) 32 registres (1 par voie)
(2) 16 registres de 32 commandes (8 réels, 4 imaginaires, 4 groupes d’axes
coordonnés)
35009561.01 07/2008
65
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "SERCOS®"
Présentation
La fonction SERCOS® est réalisée par la voie 0 des modules TSX CSY 84 / 164.
Elle consiste à gérer le bus en anneau. A la mise sous tension ou lors de la
fermeture du bus, le module de commande d’axes effectue l’auto-apprentissage du
bus.
Voie 0
La voie 0 est configurée avec des paramètres par défaut. La modification des
paramètres s’effectue soit :
z
z
Services
accessibles
66
à l’aide des écrans de configuration ou de réglage,
via l’application au moyen d’échanges explicites.
La voie 0 permet d’utiliser les services suivants (Voir Interface PL7, p. 342) :
READ_PARAM,
z WRITE_PARAM,
z WRITE_CMD,
z SAVE_PARAM,
z RESTORE_PARAM,
z READ_STS.
z
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "axe réel"
Présentation
La fonction "axe réel" est réalisée par les voies 1 à 8 du module TSX CSY 84 et par
les voies 1 à 16 du module TSX CSY 164.
Cette fonction permet de piloter les variateurs de vitesse, au travers du bus en
anneau pour créer les axes physiques (jusqu’à 8 axes physiques possibles).
Note : les paramètres du module de commande d’axes et ceux des variateurs de
vitesse sont gérés séparément au travers de PL7 et Unilink. Ainsi, si l’utilisateur
change la valeur d’un paramètre utilisé par le module et par le variateur de vitesse,
en utilisant le configurateur Unilink, celui-ci n’est pas mis à jour dans le module de
commande d’axes. Après une telle opération, l’utilisateur doit donc effectuer le
réglage du paramètre dans le module, en utilisant PL7.
Pour plus d’informations sur la gestion des paramètres, (Voir Gestion des
paramètres, p. 345).
Note : le variateur correspondant à l’axe réel 1 doit être situé à l’adresse 1 de
l’anneau SERCOS(r).
Services
accessibles
35009561.01 07/2008
Les voies 1 à 8 permettent d’utiliser les services suivants (Voir Interface PL7, p. 342)
:
z READ_PARAM,
z WRITE_PARAM,
z WRITE_CMD,
z SAVE_PARAM,
z RESTORE_PARAM,
z READ_STS,
z TRF_RECIPE.
67
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "axe imaginaire"
Présentation
La fonction "axe imaginaire" est réalisée par les voies 9 à 12 du module
TSX CSY 84 et par les voies 1 à 16 du module TSX CSY 164.
Un axe imaginaire n’est pas un axe physique, mais il peut être utilisé pour
coordonner le mouvement de plusieurs axes physiques ou bien être l’axe maître
d’un groupe d’axes suiveurs. Il peut également être utilisé pour tester un système
sans que l’axe se déplace.
Services
accessibles
Les voies 9 à 12 (du module TSX CSY 84) et 1à 16 (du module TSX CSY 164)
permettent d’utiliser les services suivants (Voir Interface PL7, p. 342) :
z
z
z
z
z
z
68
READ_PARAM,
WRITE_PARAM,
WRITE_CMD,
SAVE_PARAM,
RESTORE_PARAM,
READ_STS.
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "axe à mesure externe"
Présentation
La Fonction "axe à mesure externe" est réalisée par les voies 13 à 16 du module
TSX CSY 84 et par les voies 1 à 16 du module TSX CSY 164.
L’axe à mesure externe permet de prendre en compte une information de position
délivrée par un système externe.
Le dessin suivant présente la différence entre un axe réel et un axe à mesure
externe, vue du variateur de vitesse dans le cas du module TSX CSY 84 :
Voies 1...8
Module
TSX CSY 84
Bus SERCOS®
Moteur
Boucle de position
Boucle de vitessse
Boucle courante
Conversion de
puissance
Variateur de vitesse
Codeur
externe
Moteur
Position auxiliaire
Voies 13...16
Axe à mesure externe
Mesure externe
La mesure externe est accessible, selon la configuration, au travers de :
z
z
l’objet langage (échange implicite) %QDxy.i.0 (REMOTE_POSITION),
l’entrée auxiliaire d’un variateur.
Note : pour les voies Mesure externe supportées par un axe réel, la signalisation
d’un défaut s’effectue sur la voie axe réel correspondante.
Services
accessibles
Les voies 13 à 16 ( du module TSX CSY 84) et les voies 1à 16 ( du module
TSX CSY 164) permettent d’utiliser les services suivants (Voir Interface PL7,
p. 342) :
z
z
z
z
z
z
35009561.01 07/2008
READ_PARAM,
WRITE_PARAM,
WRITE_CMD,
SAVE_PARAM,
RESTORE_PARAM,
READ_STS.
69
Présentation fonctionnelle des modules TSX CSY 84 / 164
Notion de groupe
Présentation
Les modules TSX CSY 84/164 utilisent la notion de groupe pour commander les
axes. Toutes actions sur un groupe d'axes, implique une action identique sur les
axes membres du groupe.
Groupe
Mouvement
Tous les GroupeMouvements possèdent leur propre interface
CommandeMouvement.
z
z
z
l'interface CommandeMouvement d'un axe individuel agit toujours sur cet axe.
l'interface CommandeMouvement du Bus SERCOS® agit sur tous les axes
GroupeMouvement de la chaîne.
l'interface CommandeMouvement des Groupes Coordonnés ou des Groupes
Suiveur agit uniquement si le GroupeMouvement est sous contrôle (Get).
Le positionnement de bits de contrôle dans ces registres entraîne l'action
correspondante sur un ensemble d'axes plutôt que sur un seul axe.
Le GroupeMouvement examine l'interface CommandeMouvement à chaque cycle
d'horloge SERCOS®. Les changements ultérieurs d'un bit de contrôle doivent être
séparés d'au moins un cycle d'horloge SERCOS®. En général, il faut examiner le
registre d'EtatMouvement d'un GroupeMouvement pour déterminer si l'action d'un
bit de contrôle s'est déroulée correctement.
70
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Exemple de
configuration sur
le module
TSX CSY 84
Supposons que les groupes suivants ont été définis à la configuration
Voie 0
Groupe SERCOS®
Voie 17
Voie 21
Voie 1
Voie 3
Groupe d’axes coordonnés
z
z
z
Voie 2
Groupe d’axes suiveurs
Voie 0 : groupe SERCOS®
Voie 21 : groupe d'axes suiveurs 21, composé des axes réels 1 et 2,
Voie 17 : groupe d'axes coordonnés 17, composé des axes réels 1 et 3.
Toute action sur la voie Réseau (Voie 0) est répercutée sur les groupes 17 et 21,
ainsi que sur les axes réels 1, 2 et 3.
Toute action sur le groupe d'axes suiveurs (voie 21) est répercutée sur les axes
réels 1 et 2.
Toute action sur le groupe d'axes coordonnés (voie 17) est répercutée sur les axes
réels 1 et 3.
Note : cette règle impose, pour l'utilisation d'un axe réel, la mise à 1 des bits
d'autorisation du groupe SERCOS® (voie 0).
35009561.01 07/2008
71
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "groupe d’axes coordonnés"
Présentation
La fonction "groupe d’axes coordonnés" est réalisée par les voies 17 à 20 des
modules TSX CSY 84 / 164.
Un groupe d’axes coordonnés est un ensemble d’axes physiques (8 au maximum)
dont les mouvements sont coordonnés entre eux. Un des axes du groupe est défini
comme le maître de la coordination.
La position de chacun des axes est définie par la commande de mouvement. La
vitesse de référence pour le déplacement du groupe coordonné est celle du maître
de la coordination. L’accélération et la vitesse des autres axes sont calculées pour
que tous les axes commencent et finissent leur mouvement en même temps.
Note : il est obligatoire de référencer tous les axes utilisés par un groupe
coordonné avant de valider ce dernier et d’effectuer des déplacements
coordonnés
Note : lors de la configuration des axes dans des groupes suiveurs, il est
recommandé d’associer un seul groupe à un axe donné.
ATTENTION
Un défaut d’un axe membre doit être acquitté au niveau du groupe
(CLEAR_FAULT).
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
72
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Vitesse de
référence
La vitesse de référence pour le déplacement d’un groupe d’axes coordonnés doit
être calculée par rapport à l’axe le plus contraignant; l’algorithme réduit la vitesse
des axes les plus performants.
Par exemple dans le cas d’un système à 2 axes
Vx
Vx
V’x
X0
X1
X’1
Vy
V
Axe plus
Vy
X0
Y0
Y0
X’1
Y1
Y1
V = (V’x2 + Vy2)1/2
35009561.01 07/2008
73
Présentation fonctionnelle des modules TSX CSY 84 / 164
Vitesse
tangentielle
La vitesse tangentielle est calculée par rapport à la projection sur l’axe X de la
première vitesse définie dans l’instruction WRITE_CMD (MOVE). S’il n’y a pas de
contraintes mécaniques, saisir la vitesse maximale pour les autres vitesses.
Exemple dans le cas d’un système à 2 axes
B
YB
Vy
Vtg
Vtg = (Vx² + Vy²)1/2
YA
A
XA
Vx
XB
Le mobile doit se déplacer du point A (XA, YA) au point B (XB, YB) à une vitesse
tangentielle Vtg qui se projette sur X et Y respectivement en Vx et Vy.
A partir de la valeur Vx (axe plus contraignant) saisie dans l’instruction
WRITE_CMD (MOVE), l’interpolateur calcule la vitesse Vy puis Vtg.
Services
accessibles
Les voies 17 à 20 permettent d’utiliser les services suivants (Voir Interface PL7,
p. 342) :
z
z
z
74
WRITE_CMD,
READ_STS,
MOD_PARAM (voir Reconfiguration dynamique des groupes, p. 398),
uniquement sur le module TSX CSY 164.
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "groupe d’axes suiveurs"
Présentation
La fonction "groupe d’axes suiveurs" est réalisée par les voies 21 à 24 des modules
TSX CSY 84 / 164.
Un groupe d’axes suiveurs se compose d’axes esclaves (6 au maximum) qui suivent
le mouvement d’un axe maître.
Il existe deux manière de suivre un axe maître :
z en mode ratio : les axes esclaves suivent l’axe maître suivant un rapport défini en
configuration et appelé Rapport suiveur (la position de l’esclave est égale à celle
du maître : consigne ou mesure, multipliée par le rapport),
z en mode came : les axes esclaves suivent l’axe maître suivant un profil de came
(table de points qui donne la position de l’esclave en fonction de celle du maître
: consigne ou mesure).
L’axe maître peut être un axe réel, imaginaire ou une consigne externe. Les axes
esclaves sont des axes réels ou imaginaires.
Note : lors de la configuration des axes dans des groupes suiveurs, il est
recommandé d’associer un seul groupe à un axe donné.
ATTENTION
Dans un groupe suiveur, un axe esclave d’un maître n’applique pas les
contrôles définis dans les paramètres de vitesse et d’accélération
maximum.
Il suit sans contrainte la loi de vitesse du maître.
Un défaut d’un axe membre doit être acquitté au niveau du groupe
(CLEAR_FAULT).
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
35009561.01 07/2008
75
Présentation fonctionnelle des modules TSX CSY 84 / 164
Mode ratio
Le ratio est défini par la saisie d’un numérateur et d’un dénominateur. Le mode ratio
(engrenage) permet la gestion des commutations (mesure, consigne), des offsets
(Bias), des conditions de démarrage et d’arrêt du suiveur.
MAITRE
Consigne
Mesure
Ratio
N/D
ESCLAVE
Consigne
Mesure
Suivi sur arrêt et
bias
Ces fonctionnalités permettent de rajouter un mouvement ou un offset automatique
à la consigne de l’esclave. Ceci permet d’anticiper un mouvement avec l’activation
du suivi ou de continuer un mouvement après la désactivation du suivi.
Générateur de
mouvements
C
Consigne esclave
P
MAITRE
Commande de position
de l’axe suiveur
F
B
Offset automatique
BIAS
P=F+C+B
Services
accessibles
Les voies 21 à 24 permettent d’utiliser les services suivants (Voir Interface PL7,
p. 342 :
z
z
z
z
z
z
z
76
READ_PARAM,
WRITE_PARAM,
WRITE_CMD (sauf Move),
SAVE_PARAM,
RESTORE_PARAM,
READ_STS,
MOD_PARAM (voir Reconfiguration dynamique des groupes, p. 398),
uniquement sur le module TSX CSY 164.
35009561.01 07/2008
Présentation fonctionnelle des modules TSX CSY 84 / 164
Fonction "profil de came"
Présentation
La fonction "profil de came" est réalisée par les voies 25 à 31 des modules
TSX CSY 84 / 164.
Les profils de came sont utilisés par les groupes d’axes suiveurs pour réaliser un
suivi de l’axe maître suivant une table de points, appelée profil de came.
Un profil de came est une table de points de 2 colonnes :
z une colonne qui définit la position du maître du groupe d’axes suiveurs
(généralement un axe imaginaire),
z une colonne qui définit la position de l’esclave, associée à celle du maître.
L’interpolation entre 2 points consécutifs permet de déduire les positions qui ne sont
pas données par la table. L’interpolation peut être linéaire ou cubique.
Les positions du maître doivent être croissante. Par exemple, elles ne peuvent pas
aller de 360 degrés à 0 degré, ce qui correspondrait à des positions décroissantes.
Schéma du profil
de came
La représentation schématique d’un axe suiveur piloté par un profil de came est la
suivante :
MAITRE
Consigne
Mesure
Offset
35009561.01 07/2008
ESCLAVE
MAITRE
Consigne
ESCLAVE 1
Mesure
Came
77
Présentation fonctionnelle des modules TSX CSY 84 / 164
Came
La came peut être réalisée :
soit par une table interne au module de commande d’axes, définie par la
première valeur de la table et un incrément fixe,
z soit par une table externe au module de commande d’axes (contenue dans
l’automate), définie une adresse %KF.
z
Illustration
Table
interne
Table
externe
1ère
valeur
Index
ESCLAVE
MAITRE
Consigne
esclave
%KF
Came
Interpolation
Si l’entrée de la came correspond à une valeur comprise entre 2 points consécutifs,
la consigne de l’esclave est calculée par interpolation linéaire ou cubique (définie en
configuration)
Position esclave
Interpolation
linéaire ou
cubique
Consigne
esclave
Interpolation
cubique
Consigne
esclave
Interpolation
linéaire
Came
Position maître
Services
accessibles
Les voies 25 à 31 permettent d’utiliser les services suivants (Voir Interface PL7,
p. 342) :
z
z
z
78
WRITE_CMD,
READ_STS,
TRF_RECIPE.
35009561.01 07/2008
Configuration du module
TSX CSY 84
5
Présentation
Objet du chapitre
Ce chapitre décrit les écrans de configuration du module TSX CSY 84 et des
différentes fonctions qu’il permet de réaliser : Fonctions "SERCOS®," "axe réel",
"axe imaginaire", ...
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Présymbolisation
80
Configuration du module
81
Configuration des voies
83
Configuration de la fonction SERCOS® (voie 0)
84
Configuration d’un axe indépendant (voies 1 à 12)
85
Configuration d’un axe à mesure externe (voies 13 à 16)
90
Configuration d’un groupe d’axes coordonnés (voies 17 à 20)
92
Configuration d’un groupe d’axes suiveurs (voies 21 à 24)
93
Configuration d’un profil de came
96
79
Configuration du module TSX CSY 84
Présymbolisation
Rappel
L’éditeur de Variables permet de symboliser de manière automatique les objets
langage associés aux modules TSX CSY 84 / 164. L’utilisateur définit un symbole
générique de la voie %CHxy.i et tous les symboles des objets associés à cette voie
sont alors générés automatiquement.
Syntaxe des
symboles
La syntaxe des symboles générés automatiquement est la suivante :
Préfixe_utilisateur_Suffixe_constructeur
Préfixe_utilisateur : symbole générique donné par l’utilisateur à la voie %CHxy.i
(12 caractères au maximum).
z Suffixe_constructeur : partie du symbole correspondant à l’objet langage
associé à la voie et donné par le système (20 caractères au maximum).
z
Commentaire
80
En plus du symbole, le système génère automatiquement un commentaire
constructeur qui rappelle succinctement le rôle de l’objet.
35009561.01 07/2008
Configuration du module TSX CSY 84
Configuration du module
Introduction
Le mode Configuration permet de définir les caractéristiques de fonctionnement
pour chaque voie du module TSX CSY 84.
Ce mode est accessible en mode local.
Le module TSX CSY 84 occupe deux positions dans le rack. Aussi est-il nécessaire
pour que ce module soit proposé, de sélectionner la position la plus à droite des
deux emplacements prévus pour recevoir le module.
Ajout du module
La boîte de dialogue suivante permet d’ajouter le module TSX CSY 84 à la
configuration :
Ajouter un module
Famille:
Module:
Analogique
1.5
Communication 1.5
Comptage
1.5
Déport BusX 1.0
Mouvement
1.5
Pesage
1.7
Produits Tiers 1.0
Simulation
1.0
Tout ou Rien
1.5
TSX CAY 22
TSX CAY 33
TSX CAY 42
TSX CAY 21
TSX CAY 41
TSX CFY 11
TSX CFY 21
TSX CSY 84
TSX CSY 164
MOD.CDE AXE 2 VOIES
MOD.CDE AXE 3 VOIES
MOD.CDE AXE 4 VOIES
MOD.CDE AXE 2 VOIES
MOD.CDE AXE 4 VOIES
MOD.MOT.PAS A PAS 1 VOIE
MOD.MOT.PAS A PAS 2 VOIES
8 AXIS N4 MOTION.CONT
16 AXIS N4 MOTION.CONT
OK
Annuler
Pour cela :
z sélectionner Mouvement dans le champ Famille,
z sélectionner la référence du module (TSX CSY 84) dans le champ Module,
z valider par OK.
Déclaration du
module
Pour indiquer que le module est déclaré dans la configuration du rack, les positions
occupées par le module sont tramées et contiennent sa référence.
0
0
P
S
Y
T
S
X
2
6
0
0
5
7
3
0
3
L
o
o
p
s
o
o
C
o
m
m
3
4
C
S
Y
8
4
1
35009561.01 07/2008
81
Configuration du module TSX CSY 84
Suppression
d’un module
Voies métier
Pour supprimer un module de sa position :
cliquer sur celui-ci pour le sélectionner,
z appuyer sur la touche <Suppr>, ce qui affiche une boîte de dialogue,
z confirmer la suppression du module.
z
On appelle voie métier toutes les voies d’un module intelligent (module de
comptage, module de commande d’axes, ...). Les 32 voies du module TSX CSY 84
sont des voies métier.
Le nombre maximal de voies métier qu’il est possible d’implanter dans une
configuration est de :
z TSX P57 103/153 : 8 voies métier,
z TSX P57 203/2623/253/2823 / TPCX P57 203 : 24 voies métier,
z TSX P57 303/3623/353 / TPCX 57 353 : 32 voies métier,
z TSX P57 453/4823 : 64 voies métier.
Accès à l’écran
de configuration
du module
Pour accéder à l’écran de configuration du module, cliquer deux fois sur sa
représentation graphique (CSY 84) ou :
z sélectionner le module (en cliquant sur celui-ci),
z activer la commande Ouvrir le module du menu déroulant Services.
Ecran de
configuration
L’écran de configuration du module est le suivant :
1
2
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
3
4
Symbole :
Voie :
Fonction :
Bus SERCOS
0 SERCOS
Voies configurées : 0, 1, 9, 14, 17, 22, 24, 25
Tâche :
MAST
Description de l’écran de configuration
82
Zone
Description
1
Ce bandeau rappelle la référence catalogue du module et son adresse
géographique dans l’automate (numéro de rack et position dans le rack).
2
Cette zone de commande indique le mode en cours. Seul le mode Configuration
est accessible.
3
Cette zone de niveau "module" contient l’intitulé court du module.
4
Cette zone de niveau "voie" permet de choisir la voie à configurer et rappelle la
fonction associée, ainsi que la tâche dans laquelle les objets à échange
implicite sont échangés (toujours MAST).
Cette zone rappelle les numéros des voies configurées.
35009561.01 07/2008
Configuration du module TSX CSY 84
Configuration des voies
Introduction
Configurer une voie consiste à définir les paramètres de la fonction métier associée
à cette voie :
z Voie 0 : fonction SERCOS®,
z voies 1 à 12 : axe indépendant (axe réel ou imaginaire),
z voies 13 à 16 : axe à mesure externe,
z voies 17 à 20 : groupe d'axes coordonnés,
z voies 21 à 24 : Groupes d'axes suiveurs
z voies 25 à 31 : Profil de came
Contrôle de la
configuration
Lors de la validation de la saisie des paramètres, un contrôle de configuration est
effectué. En cas de non-cohérence (exemple : Accélération max. < Accélération
min.), un message d'erreur affiche le type d'erreur. De plus, les paramètres
concernés sont affichés en rouge à l'écran.
35009561.01 07/2008
83
Configuration du module TSX CSY 84
Configuration de la fonction SERCOS® (voie 0)
Introduction
La voie 0 qui gère le bus SERCOS® est configurée par défaut. L’écran de
configuration permet de saisir la puissance optique et rappelle la valeur des
paramètres du bus.
Ecran de
configuration
L’écran de configuration de la fonction SERCOS® sur les modules
TSX CSY 84 / 164 est le suivant :
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
0 Réseau
Voies configurées : 0
Fonction :
Bus SERCOS®
Paramètres constructeur
4000
Temps de cycle
66
Puissance optique
Description des
paramètres
84
Tâche :
MAST
µs
%
Les paramètres du bus SERCOS® sont définis dans la zone Paramètres
constructeur :
Paramètres
Description
Temps de cycle
Temps de cycle du bus SERCOS® : 2 ou 4 ms. Par défaut 4 ms. La
nouvelle valeur sera prise en compte après un passage en phase
SERCOS® 0 (ouverture de l’anneau SERCOS® ou fonction
SetCommandedPhase) puis un nouveau passage en phase 4.
Puissance optique
Réglage de la puissance optique, nécessaire au premier segment
(compris entre le module TSX CSY 84 ou TSX CSY164 et le premier
variateur de vitesse). Cette puissance (en pourcentage) doit être
fonction de la longueur du segment (par défaut 66%).
35009561.01 07/2008
Configuration du module TSX CSY 84
Configuration d’un axe indépendant (voies 1 à 12)
Introduction
Un axe indépendant est soit un axe réel (voies 1 à 8), soit un axe imaginaire (voies
9 à 12). La configuration d’un axe réel va permettre de piloter un axe physique (qui
utilise un variateur de vitesse). Dans ce cas, il est nécessaire d’assurer une certaine
cohérence entre les paramètres saisis dans l’écran de configuration du module
TSX CSY 84 et ceux définis lors de la configuration du variateur de vitesse.
Un axe imaginaire peut par exemple servir d’axe maître dans un groupe d’axes
suiveurs. Tous les paramètres d’un tel axe sont définis dans les écrans de
configuration du module de commande d’axes.
Ecran de
configuration
L’écran de configuration d’un axe indépendant est le suivant. Il propose 5 zones de
saisie des paramètres : Butées, Contrôle de position en validation, Unités,
Facteur d’échelle et Mouvement.
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
1 Réel
Axe réel
Voies configurées : 0, 1, 14, 15, 17, 22, 27
Butées
Contrôle de position
Position max.
3.000000e+002
Position min.
-3.000000e+002
Vitesse max.
1.000000e+005
Accélération max 1.000000e+005
Décélération max 1.000000e+004
Ctrl. de position en validation
Actif
Tolérance
0.000000e+000
35009561.01 07/2008
Tâche :
MAST
Unités
Type
Linéaire
Position
Vitesse
mm
mm/s
mm/s²
Accélération
Facteur d’échelle
Numérateur 1.000000e+000
Dénominateur 1.000000e+000
Mouvement
Modulo
Modulo max.
Modulo min.
2.000000e+001
-2.000000e+001
Fenêtre au point 7.000000e+000
Accélération
1.000000e+000
Décélération
1.000000e+000
Type d’accélération
Trapèze 125 %
85
Configuration du module TSX CSY 84
Paramètres de la
zone Butées
Description
Paramètres
Description
Contrôle de
position
Dans le cas d’une machine bornée, cette case à cocher permet d’activer
le contrôle des butées (limites) de position. La position de l’axe est
comparée avec les butées de position définies en configuration.
Lorsque l’axe atteint l’une de ces butées, son mouvement est arrêté et
un défaut est généré.
Dans le cas d’un axe infini, cette case ne doit pas être cochée.
Position max.
Butée de position maximale. Cette valeur est saisie en flottant.
Position min.
Butée de position minimale. Cette valeur est saisie en flottant.
Vitesse max.
Vitesse maximale autorisée. Cette valeur est indépendante de celle
définie dans le variateur de vitesse (axe réel). Cette valeur est saisie en
flottant. Lorsque la vitesse maximale est configurée à la valeur 0, le
contrôle de vitesse n’est plus validé.
Accélération max.
Accélération maximale autorisée. Cette valeur est indépendante de
celle définie dans le variateur de vitesse (axe réel). Cette valeur est
saisie en flottant.
Décélération max. Décélération maximale autorisée. Cette valeur est indépendante de
celle définie dans le variateur de vitesse (axe réel). Cette valeur est
saisie en flottant.
Paramètres de la
zone Contrôle de
position en
validation
86
Description
Paramètres
Description
Actif
Cette case à cocher permet de valider le contrôle de position.
Lorsque l’axe est désactivé :
z si son déplacement est inférieur à la tôlérance, celui-ci revient à sa
position précédente, sur réactivation de l’axe
z si son déplacement est supérieur à la tôlérance, celui-ci reste à sa
nouvelle position, sur réactivation de l’axe.
Tolérance
Valeur de la fenêtre de contrôle. Cette valeur est saisie en flottant.
35009561.01 07/2008
Configuration du module TSX CSY 84
Paramètres de la
zone Unités
Descirption
Paramètres
Description
Type
Type d’unités physiques dans lesquelles sont exprimées les mesures de
position, de vitesse et d’accélération : Angulaires, Linéaires, Linéaires
anglais ou Points codeur.
Position
Unité de position.
z Angulaire : mrad, rad, deg, arcmin, tours,
z Linéaire : μm, mm, cm, m
z Linéaire anglais : in, ft, yd, mil
z Points codeur : points.
Vitesse
Unité de vitesse.
z Angulaire : mrad/s, rad/s, rad/mim, deg/s, deg/min, arcmin/s, tours/
s, tours/min
z Linéaire : μm/s, mm/s, mm/min, cm/s, cm/min, m/s, m/min
z Linéaire anglais : in/s, in/min, ft/s, ft/min, yd/min, mil/s
z Points codeur : points/ms, points/s, points/min
Accélération
Unité d’accélération.
z Angulaire : mrad/s2, rad/s2, deg/s2, arcmin/s2, tours/s2, tours/min/s
z Linéaire : μm/s2, mm/s2, cm/s2, m/s2, m/min2, g’s
z Linéaire anglais : in/s2, ft/s2, yd/min2, mil/s2
z Points codeur : points/ms2, points/s2
Paramètres de la
zone Facteur
d’échelle
35009561.01 07/2008
Description
Paramètre
Description
Numérateur
Numérateur du facteur d’échelle. Cette valeur est saisie en flottant.
Dénominateur
Dénominateur du facteur d’échelle. Cette valeur est saisie en flottant.
87
Configuration du module TSX CSY 84
Paramètres de la
zone Mouvement
Remise à
l’échelle
Description
Paramètre
Description
Modulo
Dans le cas d’un axe infini, cette case à cocher permet d’activer la
fonction modulo.
Modulo max.
Limite haute du modulo. Cette valeur est saisie en flottant.
Modulo min.
Limite basse du modulo. Cette valeur est saisie en flottant.
Fenêtre au point
Valeur de la fenêtre au point. Cette valeur est saisie en flottant.
Accélération
Valeur d’accélération définie pour un mouvement. Cette valeur est saisie
en flottant.
Décélération
Valeur de décélération définie pour un mouvement. Cette valeur est
saisie en flottant.
Type
d’accélération
Type d’accélération : Rectangle 100%, Trapèze 125%, Trapèze 150%,
Trapèze 175% ou Triangle 200%.
Pour un variateur dont la position est définie en unité angulaire : degrés, le module
effectue une remise à l’échelle, selon sa référence qui est en tours et sa vitesse en
tours/seconde.
Par exemple, si l’on configure l’axe en type angulaire avec un facteur d’échelle de
1/1 :
z unité de position en tours et unité de vitesse en tours/s : un mouvement
incrémental de position 1 et de vitesse 1 exécutera 1 tour en 1 seconde,
z unité de position en degrés et unité de vitesse en tours/min : un mouvement
incrémental de position 360 et de vitesse 60 exécutera 1 tour en 1 seconde.
Changement du
type d’unités
Lorsque l’on change de type d’unités par rapport au variateur qui reste en tours,
l’unité de référence du module est le mm (pour le type linéaire) et le inch (pour le
type linéaire anglais). Le module réalise une transformation égale à :
z 1 tour pour le variateur = 1 mm pour le module (type linéaire),
z 1 tour pour le variateur = 1 inch pour le module (type linéaire anglais).
Par exemple, si l’on configure l’axe en type linéaire avec un facteur d’échelle 1/ 1 :
z unité de position en mm et unité de vitesse en mm/s : un mouvement incrémental
de position 1 et de vitesse 1 exécutera 1 tour en 1 seconde,
z unité de position en mm et unité de vitesse en mm/s : un mouvement incrémental
de position 1000 et de vitesse 1000 exécutera 1 tour en 1 seconde (soit 1000 mm
en 1 seconde).
88
35009561.01 07/2008
Configuration du module TSX CSY 84
Utilisation du
facteur d’échelle
35009561.01 07/2008
Soit une application où l’axe fait avancer un tapis, tel que 1 tour de l’axe fait avancer
le tapis de 100 mm. Si l’on désire exprimer la position en mm :
z l’unité de position sera configurée en mm, la vitesse en mm/s, le numérateur du
facteur d’échelle sera égal à 100 et le dénominateur restera à 1,
z un mouvement incrémental de position 1000 et de vitesse 1000 exécutera un
déplacement du tapis de 1 m (soit 10 tours de l’axe) en 1 seconde (vitesse 1000
mm/s).
89
Configuration du module TSX CSY 84
Configuration d’un axe à mesure externe (voies 13 à 16)
Introduction
Une voie de mesure externe permet de remonter au module une information de
position externe. Configurer une mesure externe revient à configurer un axe réel ou
un axe imaginaire dans lequel seule l’information de position est valide.
Ecran de
configuration
L’écran de configuration d’une mesure externe est le suivant. Il propose 3 zones de
saisie des paramètres : Facteur d’échelle, Modulo et Unités ainsi qu’un champ de
choix d’adresse.
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
15 Mes. externe
Axe à mesure externe
Voies configurées : 0, 1, 9, 13, 20, 24, 28
Tâche :
MAST
Adresse Virtuel
Facteur d’échelle
1.000000e+000
Numérateur
Dénominateur 1.000000e+000
Adresse
Modulo
Actif
Maximun
Minimun
0.000000e+000
Unités
Position
µm
0.000000e+000
Ce champ permet de définir la provenance de l’information de position :
Virtuel : la position est écrite par le programme application dans le mot de sortie
%QDxy.i.0,
z 1 à 8 : la position est lue sur l’entrée de position auxiliaire de l’axe réel défini par
le choix du champ Adresse (1 à 8).
z
Paramètres de la
zone Facteur
d’échelle
90
Description
Paramètre
Description
Numérateur
Numérateur du facteur d’échelle. Cette valeur est saisie en flottant.
Dénominateur
Dénominateur du facteur d’échelle. Cette valeur est saisie en flottant.
35009561.01 07/2008
Configuration du module TSX CSY 84
Paramètres de la
zone Modulo
Paramètres de la
zone Unités
Unité interne
Description
Paramètre
Description
Actif
Dans le cas d’un axe infini, cette case à cocher permet d’activer
l’autorisation de franchissement du modulo.
Maximum
Limite haute du modulo. Cette valeur est saisie en flottant.
Minimum
Limite basse du modulo. Cette valeur est saisie en flottant.
Description
Paramètres
Description
Position
Unité de position : mm, mm, cm, m, in, ft, yd, mil, mrad, rad, deg,
arcmin, tours, points.
L’unité interne est le mm pour le type linéaire (métrique), le inch pour le type linéaire
anglais et le tour pour le type angulaire.
Choisir une unité en degrés signifie que pour un facteur d’échelle 1/1, un incrément
de 1 point du codeur fait évoluer la position de 360 degrés. Pour une unité en cm et
un facteur d’échelle 1/1, un incrément de 1 point du codeur fait évoluer la position
de 1/10 mm.
35009561.01 07/2008
91
Configuration du module TSX CSY 84
Configuration d’un groupe d’axes coordonnés (voies 17 à 20)
Introduction
Un groupe d’axes coordonnés est un ensemble d’axes réels ou imaginaires dont les
mouvements sont coordonnés entre eux. La configuration d’un groupe d’axes
coordonnés nécessite donc de configurer au préalable les axes indépendants qui
appartiennent au groupe.
Ecran de
configuration
L’écran de configuration d’un groupe d’axes coordonnés est le suivant. Il permet de
définir la liste des axes qui seront coordonnés entre eux (8 axes au maximum).
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
17 Coordonnés
Groupe d’axes coordonnés
Voies configurées : 0, 1, 14, 15, 17, 22, 27
Tâche :
MAST
Axe
X
1
Axe X à Axe E
Y
2
Z
5
A
N
B
N
C
N
D
N
E
N
Fct. spéciale
Active
Numéro de fonction
Adresse table %KF
0
0
Ces 8 champs permettent de choisir les axes qui sont coordonnés entre eux (axes
1 à 12). La valeur N indique que l’axe n’appartient pas à la coordination. L’axe
principal de la coordination est celui qui est défini dans le champ Axe X.
Attention : les axes doivent être configurés dans l’ordre. Par exemple, il est interdit
d’avoir Axe X à N et Axe Y à 1.
Le profil d’accélération des axes d’un groupe coordonné est rectangulaire par
défaut. Bien que chaque axe pris séparément puisse avoir un profil défini, il est
toutefois possible de changer le profil du groupe par la commande SetAccelType.
Paramètres de la
zone Fonction
spéciale
92
Description
Paramètre
Description
Active
Cette case à cocher permet de valider l’activation de fonctions
spéciales.
Numéro de fonction
Ce champ permet de saisir le numéro de la fonction spéciale à activer.
Adresse table %KF
Ce champ permet de saisir l’adresse de début de la table contenant
les paramètres associés à la fonction spéciale.
35009561.01 07/2008
Configuration du module TSX CSY 84
Configuration d’un groupe d’axes suiveurs (voies 21 à 24)
Introduction
Un groupe d’axes suiveurs est un ensemble d’axes, composé d’axes esclaves (6 au
maximum) qui suivent les mouvements d’un axe maître.
L’axe maître peut être un axe réel, un axe imaginaire ou une consigne externe. Les
axes esclaves sont des axes réels ou imaginaires.
Ecran de
configuration
L’écran de configuration d’un groupe d’axes suiveurs est le suivant. Il propose 7
zones qui permettent de configurer l’axe maître et les 6 axes esclaves possibles.
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
Tâche :
22 suiveur
Groupe d’axes suiveurs
MAST
Voies configurées : 0, 1, 9, 13, 15, 17, 20 ,24, 28
Maître
1
Esclave 1
Engrenage Came Ratio 1.000000e+000 1.000000e+000
2
Bias
Arrêt sur suivi
remains
Stop
Trigger 0.000000e+000
maître/déf
Mesure Consigne Démarrage Immediatly
Esclave 2
Bias
Arrêt sur suivi
Engrenage Came No 25
Offset 1.000000e+000
4
remains
Stop
Trigger 0.000000e+000
Mesure Consigne Démarrage Immediatly
maître/déf
Esclave 3
Bias
Arrêt
sur suivi
Came
Ratio
Engrenage
1.000000e+000
1.000000e+000
N
remains
Stop
Trigger 0.000000e+000
Mesure Consigne Démarrage Immediatly
maître/déf
Esclave 4
Bias
Arrêt sur suivi
Engrenage Came Ratio 1.000000e+000 1.000000e+000
N
remains
Stop
Trigger 0.000000e+000
Mesure Consigne Démarrage Immediatly
maître/déf
Esclave 5
Bias
Arrêt
sur suivi
Came
Ratio
Engrenage
1.000000e+000 1.000000e+000
N
remains
Stop
Immediatly
Trigger
Mesure Consigne Démarrage
0.000000e+000
maître/déf
Maître
Ce champ permet de définir le numéro de l’axe maître (axes 1 à 16). La valeur N
indique que l’axe maître n’est pas choisi.
Zones Esclave
Les 6 zones Esclave 1 à 6 sont identiques. Elles ne sont actives que lorsque le
numéro du maître est défini.
35009561.01 07/2008
93
Configuration du module TSX CSY 84
Paramètres
d’une zone
Esclave
94
Description
Paramètre
Description
Esclave 1 (à 6)
Permet de définir le numéro de l’axe esclave (axes 1 à 12).
Mesure
Lorsque ce bouton est coché, l’axe esclave suit la position mesurée de
l’axe maître. Ce bouton fonctionne en alterné avec le bouton Consigne.
Consigne
Lorsque ce bouton est coché, l’axe esclave suit la position de consigne
de l’axe maître. Ce bouton fonctionne en alterné avec le bouton
Mesure.
Engrenage
Lorsque ce bouton est coché, l’axe esclave suit l’axe maître en mode
Ratio; c’est-à-dire suivant un rapport déterminé par les champ Ratio.
Ce bouton fonctionne en alterné avec le bouton Came.
Came
Lorsque ce bouton est coché, l’axe esclave suit l’axe maître en mode
Came; c’est à dire suivant le profil de came dont le numéro est choisi
dans le champ No. Ce bouton fonctionne en alterné avec le bouton
Engrenage.
Ratio
En mode Ratio, ces 2 champs permettent de saisir le numérateur et le
dénominateur qui définissent le rapport entre l’axe maître et esclave.
Ces valeurs sont saisies en flottant.
Démarrage
Permet de choisir la condition de démarrage :
z immédiat,
z lorsque la position du maître augmentée de la valeur d’offset atteint
dans le sens positif, la valeur de seuil définie dans le champ Trigger,
z lorsque la position du maître plus la valeur d’offset atteint dans le
sens négatif, la valeur de seuil définie dans la champ Trigger,
z lorsque la position du maître plus la valeur d’offset est supérieure ou
égale à la valeur de seuil définie dans le champ Trigger,
z lorsque la position du maître plus la valeur d’offset est inférieure ou
égale à la valeur de seuil définie dans le champ Trigger.
No
En mode Came, ce champ permet de choisir le numéro du profil de
came (compris entre 25 et 31).
Offset
En mode Came, ce champ permet de saisir une valeur d’offset qui sera
ajoutée à la position du maître, afin de définir la position de l’esclave.
La position de l’esclave résultante sera donnée par l’index dans la table
du maître du profil de came. Cet index est égal à la position actuelle du
maître + offset. Par exemple, soit un profil de came défini de 0 à 1000
pour les coordonnés du maître. Pour démarrer le suivi pour une position
du maître égale à 100000, la valeur de l’offset devra être égale à 100000.0.
Cet offset permet par exemple de définir une fonction sinus et une
fonctions cosinus, à partir d’un même profil de came. Cette valeur est
saisie en flottant.
35009561.01 07/2008
Configuration du module TSX CSY 84
Paramètre
Description
Bias remains
(résiduel)
z un offset dynamique est rajouté de manière automatique à la
Lorsque cette case est cochée :
position du maître, afin de définir la position de l’esclave,
z les mouvements supplémentaires des esclaves ne sont pas arrêtés
sur suppression du lien avec le maître.
Trigger
Lorsque la condition de démarrage dépend de la position de l’axe
maître par rapport à un seuil, ce champ permet de saisir la valeur du
seuil. Cette valeur est saisie en flottant.
Le déclenchement aura lieu lorsque position actuelle du maître + offset
> (ou <, >, <) à la valeur du seuil (Trigger).
Arrêt sur suivi
Lorsque cette case est cochée, la validation du lien entre le maître et
l’esclave provoque l’arrêt d’un éventuel mouvement supplémentaire de
l’axe suiveur, suivant un profil de décélération déterminé
automatiquement.
Stop maître/déf.
Lorsque cette case est cochée, le maître s’arrête lors d’un défaut
d’écart de poursuite entre le maître et l’esclave.
Position d’un axe
suiveur
Lorsqu’un axe est suiveur, sa position dépend uniquement de celle de l’axe
maître qu’il suit. Les paramètres de configuration de l’axe (butées de position,
vitesse maximale, accélération maximale,...) sont ignorés. Pour garantir la
sécurité de l’application, configurer ces paramètres (de sécurité) dans le
variateur de vitesse.
Facteur d’échelle
Dans un groupe d’axes suiveurs, le facteur d’échelle est décorélé des unités
utilisées pour les axes, lorsque celles-ci sont de même type (Linéaire, Angulaire, ...).
Par exemple, si l’axe maître est configuré en m et l’axe esclave en cm (unités
différentes mais de même type : Linéaire) et si on utilise un facteur d’échelle 1/ 1,
cela signifie que si le maître parcourt 1 mm, l’esclave se déplacera également de 1
mm.
Si les unités du maître et de l’esclave sont de types différents, il faut convertir les
unités dans l’unité de référence du type d’unités (mm pour le type linéaire, inch pour
le type linéaire anglais, tour pour le type angulaire). Par exemple, si le maître est
configuré en m et l’esclave en tours (unités de types différents : Linéaire et
Angulaire) et si on veut que lorsque le maître se déplace de 1 m, l’esclave effectue
1 tour, il faudra définir le facteur d’échelle de la manière suivante :
z 1 m = 1000 mm (en unité de référence du type linéaire),
z 1 tour = 1 tour (en unité de référence du type angulaire),
donc le facteur d’échelle = 1000/1 (quand le maître fait 1000 mm, l’esclave fait 1
tour).
35009561.01 07/2008
95
Configuration du module TSX CSY 84
Configuration d’un profil de came
Introduction
Un profil de came permet de définir par une table de points, la position d’un axe
esclave, en fonction de celle de l’axe maître.
Modules
TSX CSY 84 / 164
Sur les modules TSX CSY 84 / 164, la configuration d’un profil de came se réalise
sur les voies 25 à 31.
Exemple de
configuration
L’écran de configuration d’un profil de came sur le module TSX CSY 84 propose 3
zones qui permettent de définir la table de points maître et esclave.
TSX CSY 84 [RACK0 POSITION 3]
Configuration
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
27 Profil came
Profil de came
Voies configurées : 0, 1, 14, 15, 17, 22, 27
Linéaire
Cubique
Nb. points
0
Tâche :
MAST
Incrément maître
Unité
Valeur de démarrage
Fixe
µm
Variable Incrément
0.000000e+000
Incrément esclave
Unité
Fixe
Adresse table %KF
µm
Variable
0
0.000000e+000
Paramètres de la table :
96
Paramètres
Description
Linéaire
Lorsque ce bouton est coché, l’interpolation entre 2 points consécutifs
du profil de came s’effectue de manière linéaire. Ce bouton fonctionne
en alterné avec le bouton Cubique.
Cubique
Lorsque ce bouton est coché, l’interpolation entre 2 points consécutifs
du profil de came s’effectue de manière cubique. Ce bouton fonctionne
en alterné avec le bouton Linéaire.
Nb. points
Ce champ permet de saisir le nombre de points utilisés pour définir le
profil de came.
35009561.01 07/2008
Configuration du module TSX CSY 84
Paramètres de la zone incrément maître :
Paramètres
Description
Unité
Permet de définir l’unité dans laquelle sont exprimés les incrément du
maître. L’unité choisie peut être une sous-unité de celle définie pour les
axes (par exemple, cm pour les axes et mm pour l’incrément).
Fixe
Lorsque ce bouton est coché, l’incrément entre 2 points consécutifs du
profil de came sera toujours le même. Ce bouton fonctionne en alterné
avec le bouton Variable.
Valeur de
démarrage
Dans le cas d’un incrément fixe, ce champ permet de saisir la valeur de
début du profil de came. Cette valeur est saisie en flottant.
Incrément
Dans le cas d’un incrément fixe, ce champ permet de définir la valeur
de l’incrément. Cette valeur est saisie en flottant.
Variable
Lorsque ce bouton est coché, l’incrément entre 2 points consécutifs du
profil de came est variable. La valeur des points est définie par une
table de mots constants %KF dont la longueur est égale au nombre de
points.
Adresse table %KF Dans le cas d’un incrément variable, ce champ permet de saisir
l’adresse de début de la table des points du maître.
Note : un profil de came est toujours circulaire. Il faut assurer l’égalité entre la
première et la dernière valeur de la table pour l’esclave.
Dans le cas d’un mouvement circulaire, la table décrira entièrement le modulo et
on rajoutera un point supplémentaire (modulo + 1) dont la valeur de l’esclave sera
la première valeur de la table.
Par exemple, pour modulo 360° les valeurs sont 0 à 359 et la table est la suivante
: Table (maître, esclave) : (0, x0); (1, x1); (2, x2); ...; (359, x359); (360, x0)
Dans le cas d’un mouvement linéaire et si la dernière valeur de la table pour
l’esclave n’est pas égale à la première valeur, on rajoutera des points supplémentaires (par exemple on répétera plusieurs fois le dernier point avec des valeurs
d’esclave qui tendront progressivement vers la première valeur de la table).
35009561.01 07/2008
97
Configuration du module TSX CSY 84
Paramètres de la zone incrément esclave :
Paramètres
Description
Unité
Permet de définir l’unité dans laquelle sont exprimés les incrément de
l’esclave. L’unité choisie peut être une sous-unité de celle définie pour
les axes (par exemple, cm pour les axes et mm pour l’incrément).
Fixe
Lorsque ce bouton est coché, l’incrément entre 2 points consécutifs du
profil de came sera toujours le même. Ce bouton fonctionne en alterné
avec le bouton Variable.
Valeur de
démarrage
Dans le cas d’un incrément fixe, ce champ permet de saisir la valeur de
début du profil de came. Cette valeur est saisie en flottant.
Incrément
Dans le cas d’un incrément fixe, ce champ permet de définir la valeur
de l’incrément. Cette valeur est saisie en flottant.
Variable
Lorsque ce bouton est coché, l’incrément entre 2 points consécutifs du
profil de came est variable. La valeur des points est définie par une
table de mots constants %KF dont la longueur est égale au nombre de
points.
Adresse table %KF Dans le cas d’un incrément variable, ce champ permet de saisir
l’adresse de début de la table des points de l’esclave.
98
35009561.01 07/2008
Programmation des modules
TSX CSY 84 / 164
6
Présentation
Objet du chapitre
Ce chapitre décrit les différentes fonctions associées au mouvement des axes.
Note : un programme TSX CSY 84 écrit en PL7 sera compatible avec le module
TSX CSY 164. Toutefois le portage d’une application écrite pour un TSX CSY 84
en une application pour le TSX CSY 164 s’effectue par une opération de
"reconfiguration" de l’application PL7.
Contenu de ce
chapitre
35009561.01 07/2008
Ce chapitre contient les sous-chapitres suivants :
Souschapitre
Sujet
Page
6.1
Bits d’état de mouvement
100
6.2
Fonctions de commande de mouvement
134
6.3
Fonctions de mouvement
150
6.4
Fonction de mouvement à la désactivation de suivi
161
6.5
Fonctions de position/vitesse courante
167
6.6
Fonctions de suivi
174
99
Programmation des modules TSX CSY 84 / 164
6.1
Bits d’état de mouvement
Présentation
Objet de ce
sous-chapitre
Cette section décrit les bits d’état de mouvement accessibles par échange implicite
(bits %Ixy.i.0 à %Ixy.i.31) ou par la fonction GetStatus.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Bit RAMPING (%Ixy.i.0)
100
Page
102
Bit STEADY (%Ixy.i.1)
103
Bit STOPPING (%Ixy.i.2)
104
Bit PROFILE_END (%Ixy.i.3)
105
Bit IN_POSITION (%Ixy.i.4)
106
Bit AXIS_HOMING (%Ixy.i.5)
107
Bit AXIS_HOMED (%Ixy.i.6)
108
Bit AXIS_NOT_FOLLOWING (%Ixy.i.7)
109
Bit HOLDING (%Ixy.i.8)
110
Bit RESUMING (%Ixy.i.9)
111
Bit DRIVE_ENABLED (%Ixy.i.10)
112
Bit DRIVE_DIAG (%Ixy.i.11)
113
Bit DRIVE_WARNING (%Ixy.i.12)
114
Bit DRIVE_FAULT (%Ixy.i.13)
115
Bit DRIVE_DISABLED (%Ixy.i.14)
116
Bit AXIS_SUMMARY_FAULT (%Ixy.i.15)
117
Bit AXIS_COMM_OK (%Ixy.i.16)
118
Bit AXIS_IS_LINKED (%Ixy.i.17)
119
Bit AXIS_AT_TARGET (%Ixy.i.20)
120
BIt AXIS_POS_LIMIT (%Ixy.i.21)
121
Bit AXIS_NEG_LIMIT (%Ixy.i.22)
122
Bit AXIS_IN_COMMAND (%Ixy.i.18)
123
Bit AXIS_WARNING (%Ixy.i.23)
124
Bit BIAS_REMAIN (%Ixy.i.24)
125
BIT AXIS_MANUAL_MODE (%Ixy.i.25)
126
Bit DRIVE_REALTIME_BIT1 (%Ixy.i.26)
127
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Sujet
35009561.01 07/2008
Page
Bit DRIVE_REALTIME_BIT2 (%Ixy.i.27)
128
Bit AXIS_HOLD (%Ixy.i.28)
129
Bit AXIS_HALT (%Ixy.i.29)
130
Bit AXIS_FASTSTOP (%Ixy.i.30)
131
Bit AXIS_READY (%Ixy.i.31)
132
Bit CONF_OK (%Ixy.i.32)
133
101
Programmation des modules TSX CSY 84 / 164
Bit RAMPING (%Ixy.i.0)
Description
Ce bit (état 1) indique que le profil de mouvement commandé est de type
accélération ou décélération.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Profil de type accélération ou décélération.
Application à la
fonction Groupe
d’axes
coordonnés
Profil de type accélération ou décélération.
Les bits RAMPING des axes membres (AXIS_IS_LINKED) sont également
positionnés à 1.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 si un ou plusieurs bits RAMPING des axes membres sont
positionnés à 1.
Application à la
fonction
SERCOS®
Ce bit est positionné à 1 si le bit RAMPING d’un axe est positionné à 1.
102
En mode ratio, un bit RAMPING d'un axe membre est positionné à 1 pendant que
le ratio de l'axe suiveur prend une nouvelle valeur.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit STEADY (%Ixy.i.1)
Description
Ce bit (état 1) indique que le profil de mouvement commande une vitesse uniforme.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Profil de type vitesse uniforme.
Application à la
fonction Groupe
d’axes
coordonnés
Profil de type vitesse uniforme.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 si tous les bits STEADY des axes membres sont
positionnés à 1.
Application à la
fonction
SERCOS®
Ce bit est positionné à 1 si tous les bits STEADY des axes sont positionnés à 1.
35009561.01 07/2008
Les bits STEADY des axes membres (AXIS_IS_LINKED) sont également
positionnés à 1.
Le bit STEADY reste à l’état 0, si le mouvement d’un esclave n’est que la recopie
de celui du maître (pas de mouvement supplémentaire).
103
Programmation des modules TSX CSY 84 / 164
Bit STOPPING (%Ixy.i.2)
Description
Ce bit (état 1) indique que le profil de mouvement commandé est de type
décélération avec arrêt du mouvement.
Il reste positionné à 1 jusqu'à ce que le bit IN_POSITION (%Ixy.i.4) soit positionné
à 1.
Le bit STOPPING est positionné à 0 lorsque le bit PROFILE_END (%Ixy.i.3) passe
à l’état 1.
Note : le bit STOPPING n’est pas positionné à l’état 1 dans le cas d’une
décélération due à la mise à 0 des bits ALLOW_MOVE ou ALLOW_RESUME.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Profil de mouvement de type décélération avec arrêt du mouvement.
Application à la
fonction Groupe
d’axes
coordonnés
Profil de mouvement de type décélération avec arrêt du mouvement.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 si un ou plusieurs bits STOPPING des axes membres sont
positionnés à 1.
Application à la
fonction
SERCOS®
Ce bit est positionné à 1 si le bit STOPPING d’un axe est positionné à 1.
104
Les bits STOPPING des axes membres (AXIS_IS_LINKED) sont également
positionnés à 1.
Les bits STOPPING ne vérifient pas si l'axe se stabilise, du fait qu'un axe membre
peut être en mouvement en réponse au mouvement de son maître.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit PROFILE_END (%Ixy.i.3)
Description
Ce bit (état 1) indique que le mouvement commandé a pris fin.
L'axe peut être encore en cours de stabilisation jusqu'à ce que le bit IN_POSITION
(%Ixy.i.4) soit positionné à 1 ou que le bit STOPPING (%Ixy.i.2) soit effacé.
PROFILE_END est positionné à 1 dès que l'axe est désactivé ou que l'arrêt est
effectif.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Le profil de mouvement a envoyé sa dernière commande vers le variateur asservi.
L'axe peut être en cours de stabilisation.
Application à la
fonction Groupe
d’axes
coordonnés
Le profil de mouvement du GroupeCoordonné a envoyé sa dernière commande à
tous les variateurs des axes membres.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 si tous les bits PROFILE_END des axes membres sont
positionnés à 1. Ceci ne signifie pas que les axes membres ne sont pas en
mouvement. Ils peuvent suivre le mouvement de leur axe maître.
Application à la
fonction
SERCOS®
Ce bit est positionné à 1 si tous les bits PROFILE_END des axes sont positionnés
à 1.
35009561.01 07/2008
Les bits PROFILE_END des axes membres (AXIS_IS_LINKED) sont également
positionnés à 1. Les axes membres peuvent être en cours de stabilisation.
105
Programmation des modules TSX CSY 84 / 164
Bit IN_POSITION (%Ixy.i.4)
Description
Ce bit (état 1) indique que la position de l’axe est dans la fenêtre au point et que le
bit STOPPING (%Ixy.i.2) est à 1.
IN_POSITION est positionné à 0 lorsque l'axe est désactivé ou que l'arrêt est
effectif.
Application à la
fonction Axe réel
La position de l'axe est dans la fenêtre au point (bit STOPPING à 1).
Application à la
fonction Axe
imaginaire
IN_POSITION est positionné à 1 dès que PROFILE_END (%Ixy.i.3) est positionné
à 1.
Application à la
fonction Groupe
d’axes
coordonnés
L’ensemble des axes sont dans la fenêtre au point (bits STOPPING à 1) et les
différents bits IN_POSITION des axes membres (AXIS_IS_LINKED) sont
positionnés à 1.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 :
z
z
si tous les bits IN_POSITION des axes membres sont positionnés à 1,
le suivi est désactivé.
Note : les bits IN_POSITION des axes membres sont positionnés à 0 lorsqu’ils
suivent le maître, celui-ci étant en mouvement ou non.
Application à la
fonction
SERCOS®
106
Ce bit est positionné à 1 si tous les bits IN_POSITION des axes sont positionnés à 1.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_HOMING (%Ixy.i.5)
Description
Ce bit (état 1) indique que l’axe effectue une fonction de type Prise d’origine (voir
Fonction Home, p. 144).
Application à la
fonction Axe réel
Fonction de type Prise d’origine.
Application à la
fonction
Axe imaginaire
Non significatif
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit AXIS_HOMING des axes membres
(AXIS_IS LINKED) est positionné à 1.
35009561.01 07/2008
107
Programmation des modules TSX CSY 84 / 164
Bit AXIS_HOMED (%Ixy.i.6)
Description
Ce bit (état 1) indique que la fonction Prise d’origine s'est exécutée correctement.
Application à la
fonction Axe réel
La position de l'axe est référencée à partir de l'origine.
Ce bit n'est pas positionné à 1 dans les cas suivants :
z
z
z
la fonction prise d’origine n'a jamais été exécutée ou elle a échoué,
le réseau SERCOS® tombe en panne ou le variateur détecte une panne du
système de recopie de position,
suite à la fonction Unhome.
Note : ce bit est positionné à 1 suite à la fonction ForcedHomed.
Application à la
fonction
Axe imaginaire
Non significatif
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit AXIS_HOMED des axes membres
(AXIS_IS_LINKED) est positionné à 1.
108
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_NOT_FOLLOWING (%Ixy.i.7)
Description
Ce bit (état 1) indique que le variateur ignore le profil de mouvement du contrôleur
pendant qu'il effectue une opération particulière (par exemple prise d'origine, arrêt
rapide ou arrêt).
Note : ce bit n'est pas disponible sur tous les variateurs SERCOS®.
Application à la
fonction Axe réel
Inhibition du contrôleur pendant que le variateur effectue une opération particulière.
Application à la
fonction
Axe imaginaire
Le bit est positionné à 1 si l'axe est désactivé; il est positionné à 0 dans le cas
contraire.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit AXIS_NOT_FOLLOWING des axes
membres est positionné à 1.
35009561.01 07/2008
109
Programmation des modules TSX CSY 84 / 164
Bit HOLDING (%Ixy.i.8)
Description
Ce bit (état 1) indique soit que l'axe est :
z
z
arrêté en pause,
en cours de décélération avec arrêt du mouvement.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Axe arrêté ou en cours d’arrêt vers une pause.
Application à la
fonction Groupe
d’axes
coordonnés
Les axes du groupe d’axes coordonnés sont arrêtés ou en cours d’arrêt de
mouvement.
Application aux
fonctions
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit HOLDING des axes membres est
positionné à 1.
110
Les bits HOLDING des axes membres (AXIS_IS_LINKED) sont également
positionnés à 1.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit RESUMING (%Ixy.i.9)
Description
Ce bit (état 1) indique que l'axe redémarre après une mise en pause. L'axe accélère
à nouveau pour s'adapter au profil du mouvement.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Démarrage de l’axe après une mise en pause.
Application à la
fonction Groupe
d’axes
coordonnés
Démarrage des Axes du groupe d’axes coordonnés après une mise en pause.
Application aux
fonctions
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit RESUMING des axes membres est
positionné à 1.
35009561.01 07/2008
Les bits RESUMING des axes membres (AXIS_IS_LINKED) sont également
positionnés à 1.
111
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_ENABLED (%Ixy.i.10)
Description
Ce bit (état 1) indique que le variateur est activé et que le moteur associé est
alimenté.
Note : si le bit AXIS_READY (%Ixy.i.31) est positionné à 1, il est possible qu'une
commande de mouvement soit en cours sur l'axe.
Application à la
fonction Axe réel
Variateur activé, moteur alimenté.
Application à la
fonction
Axe imaginaire
L'axe est activé suite à un front motant du bit CONTROL_ENABLE.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si tous les bits DRIVE_ENABLED des axes membres
(AXIS_IS_LINKED) sont positionnés à 1.
112
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_DIAG (%Ixy.i.11)
Description
Ce bit (état 1) indique une modification d'un bit de diagnostic SERCOS® de classe
3.
La variable IDN 0013 contient les informations en cours.
Ce bit est positionné à 0 lors de la lecture de la variable IDN 0013 .
Note : les bits SERCOS® de classe 3 ne sont pas affectés par la norme
SERCOS® IDN 0013.
Application à la
fonction Axe réel
Modification d’un bit de diagnostic de classe 3 (information).
Application à la
fonction
Axe imaginaire
Non significatif
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit DRIVE_DIAG des axes membres
(AXIS_IS_LINKED) est positionné à 1.
35009561.01 07/2008
113
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_WARNING (%Ixy.i.12)
Description
Ce bit (état 1) indique une modification d'un bit de diagnostic SERCOS® de classe
2.
La variable IDN 0012 contient les informations en cours.
Ce bit est positionné à 0 lors de la lecture de la variable IDN 0012.
Application à la
fonction Axe réel
Modification d’un bit de diagnostic de classe 2 (Warning).
Application à la
fonction
Axe imaginaire
Non significatif
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit DRIVE_WARNING des axes membres
(AXIS_IS_LINKED) est positionné à 1.
114
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_FAULT (%Ixy.i.13)
Description
Ce bit (état 1) indique une modification d'un bit de diagnostic SERCOS® de classe
1.
La variable IDN 0011 contient les informations en cours.
Ce bit est positionné à 0 :
z
z
lors de la lecture de la variable IDN 0011,
par un front montant CONTROL_CLEAR_FAULT.
Application à la
fonction Axe réel
Modification d’un bit de diagnostic de classe 1 (défaut).
Application à la
fonction
Axe imaginaire
Non significatif
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit DRIVE_FAULT des axes membres
(AXIS_IS_LINKED) est positionné à 1.
35009561.01 07/2008
115
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_DISABLED (%Ixy.i.14)
Description
Ce bit (état 1) indique que le variateur est désactivé et l'alimentation du moteur est
coupée.
Application à la
fonction Axe réel
Variateur désactivé, moteur coupé.
Application à la
fonction
Axe imaginaire
L’axe est désactivé suite à une mise à 0 du bit ALLOW_ENABLE.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si tous les bits DRIVE_DISABLED des axes membres
(AXIS_IS_LINKED) sont positionnés à 1.
116
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_SUMMARY_FAULT (%Ixy.i.15)
Description
Ce bit (état 1) indique soit :
z
z
z
un défaut variateur (DRIVE_FAULT),
un défaut de communication SERCOS® (AXIS_COM_OK à 0),
un défaut du contrôleur de profil de mouvement (AXIS_POS_LIMIT ou
AXIS_NEG_LIMIT).
Mais aussi, des erreurs dans les groupes suiveurs ou coordonnés (nouvelle fonction
commune aux modules TSX CSY 84 / 164) telles que :
z
les groupes validés comportant un axe en défaut seront signalés en défaut
(%Ixy.i.15 à 1), avec une information donnée par la fonction
GET_MOTION_FAULT : défaut sur membre groupe (bit 02
(MF_MEMBER_FAULT) du mot MOTION_FAULT).
ainsi que la propagation des défauts et warning (nouvelle fonction commune aux
modules TSX CSY 84 / 164) :
z
un défaut réel sur les axes,
Les informations concernant le défaut sont accessibles à l’aide de la fonction
GetMotionFault (voir Fonction GetMotionFault, p. 310).
Note : le bit de commande ALLOW_NOT_FAULT à l’état 0 provoque un
défaut"AXIS_SUMMARY_FAULT".
Application aux
fonctions
Axe réel ou
Axe imaginaire
Défaut de mouvement.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs ou
SERCOS®
Ce bit est positionné à 1 si au moins un bit AXIS_SUMMARY_FAULT des axes
membres (AXIS_IS_LINKED) est positionné à 1.
35009561.01 07/2008
117
Programmation des modules TSX CSY 84 / 164
Bit AXIS_COMM_OK (%Ixy.i.16)
Description
ce bit (état 1) indique que le variateur est mis correctement sous tension et que les
communications entre le contrôleur de mouvement et le variateur sont actives.
Application à la
fonction Axe réel
La communication cyclique entre le contrôleur de mouvement et le variateur est
établie.
Application à la
fonction
Axe imaginaire
Non significatif
Application aux
fonctions
Groupe d’axes
coordonnés ou
d’axes suiveurs
Ce bit est positionné à 1 si tous les bits AXIS_COMM_OK des axes membres sont
positionnés à 1.
Application à la
fonction
SERCOS®
Signification du bit à 1 dans les différents cas possibles.
Aucun axe configuré
Un axe au moins est configuré
communication cyclique SERCOS®
tous les bits AXIS_COMM_OK des axes
établie et possibilité de configurer les axes. membres (AXIS_IS_LINKED) sont positionnés
à 1;
118
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_IS_LINKED (%Ixy.i.17)
Description
Ce bit (état 1) indique que l'axe est un membre actif d'un groupe d'axes. L'axe
répond aux commandes en provenance d'un GroupeCoordonné ou d'un
GroupeSuiveur.
Note : dans le groupe d’axes suiveurs, le maître n’est pas un axe membre.
Application aux
fonctions
Axe réel et
Axe imaginaire
Membre actif d'un GroupeCoordonné ou d'un GroupeSuiveur.
Application à la
fonction Groupe
d’axes
coordonnés
Bit non significatif
Lorsque le GroupeCoordonné est activé et actif, les bits AXIS_IS_LINKED des axes
membres sont positionnés à 1.
Les axes membres suivent le profil de mouvement du GroupeCoordonné.
Note : il est interdit d’agir directement sur les axes membres du
GroupeCoordonné.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 si tous les bits AXIS_IS_LINKED des axes membres
esclaves sont positionnés à 1.
Les axes membres suivent le profil de mouvement de l'axe maître du
GroupeSuiveur en fonction d'un RatioSuiveur ou d'un ProfilCame.
Note : les commandes de mouvement à destination des axes membres sont
autorisées et s'ajoutent au mouvement résultant du suivi de l'axe maître.
Application à la
fonction
SERCOS®
35009561.01 07/2008
Ce bit est positionné à 1 si au moins un bit AXIS_IS_LINKED des axes est
positionné à 1.
119
Programmation des modules TSX CSY 84 / 164
Bit AXIS_AT_TARGET (%Ixy.i.20)
Description
Ce bit (état 1) indique que la position de l'axe est :
z
z
dans la fenêtre au point,
arrivé à la fin d'un profil de mouvement (PROFILE_END à 1).
AXIS_AT_TARGET est positionné à 0 dès qu’une nouvelle commande de
mouvement est émise.
Note : A la différence de IN_POSITION, AXIS_AT_TARGET n'est pas modifié
lorsque l'axe est désactivé; il n'est pas positionné à 1 après un arrêt à moins que
la position d'arrêt corresponde à la position cible du profil de mouvement d'origine.
Application aux
fonctions
Axe réel ou
Axe imaginaire
Axe est dans la fenêtre au point avec bit PROFILE_END à 1.
Application aux
fonctions
Groupe d’axes
coordonnés et
SERCOS®
Ce bit est positionné à 1 lorsque tous les bits AXIS_AT_TARGET des axes
membres (AXIS_IS_LINKED) sont positionnés à 1.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 si tous les bits AXIS_AT_TARGET des axes membres sont
positionnés à 1.
Note : les bits AXIS_AT_TARGET des axes membres sont positionnés à 0
lorsqu'ils suivent le maître.
120
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
BIt AXIS_POS_LIMIT (%Ixy.i.21)
Description
Ce bit (état 1) indique que l'axe a atteint ou dépassé la butée haute (position max.).
La validité de ce bit implique que les bits DRIVE_ENABLED et AXIS_HOMED soient
positionnés à 1.
La remise à 0 de ce bit est réalisée par un front montant du bit
CONTROL_CLEAR_FAULT dans la mesure ou le défaut à disparu.
Application aux
fonctions
Axe réel et
Axe imaginaire
Position de l'axe commandé sur ou au-delà de la butée haute.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs et
SERCOS®
Ce bit est positionné à 1 si un bit AXIS_POS_LIMIT des axes membres
(AXIS_IS_LINKED) est positionné à 1.
35009561.01 07/2008
121
Programmation des modules TSX CSY 84 / 164
Bit AXIS_NEG_LIMIT (%Ixy.i.22)
Description
Ce bit (état 1) indique que l'axe a atteint ou dépassé la butée basse (position min.).
La validité de ce bit implique que les bits DRIVE_ENABLED et AXIS_HOMED soient
positionnés à 1.
La remise à 0 de ce bit est réalisée par un front montant du bit
CONTROL_CLEAR_FAULT dans la mesure ou le défaut à disparu.
Application aux
fonctions
Axe réel et
Axe imaginaire
Position de l'axe commandé sur ou en de-çà de la butée basse.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe suiveurs
et SERCOS®
Ce bit est positionné à 1 si un bit AXIS_NEG_LIMIT des axes membres
(AXIS_IS_LINKED) est positionné à 1.
122
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_IN_COMMAND (%Ixy.i.18)
Description
ce bit (état 1) indique que l’axe est actif et peut être commandé.
Application aux
fonctions
Axe réel et
Axe imaginaire
Axe actif.
Application à la
fonction Groupe
d’axes
coordonnés
Ce bit est positionné à 1 lorsque :
z
z
le GroupeCoordonné a été activé,
les axes membres (AXIS_IS_LINKED) n'ont pas été libérés de son contrôle.
Les axes membres ne répondent pas aux commandes qui leur sont envoyées.
Le bit AXIS_IN_COMMAND du GroupeCoordonné est positionné à 0 après une
mise à 0 des bits ALLOW_ACQUIRE ou ALLOW_ENABLE.
Note : les commandes de mouvement sont fournies au GroupeCoordonné, et non
aux axes membres.
Application à la
fonction Groupe
d’axes suiveurs
Ce bit est positionné à 1 lorsque :
z
z
le GroupeCoordonné a été activé,
les axes membres n'ont pas été libérés de son contrôle.
Les bits AXIS_IN_COMMAND des axes membres sont positionnés à 1 du fait que
leurs axes membres répondront aux commandes de mouvement qui leur sont
envoyées et qu'ils suivront l'axe maître si le suivi est actif. Les deux profils de
mouvement sont additionnés.
Application à la
fonction
SERCOS®
35009561.01 07/2008
Non significatif
123
Programmation des modules TSX CSY 84 / 164
Bit AXIS_WARNING (%Ixy.i.23)
Description
Ce bit (état 1) indique soit :
z
la détection d’un avertissement de mouvement (voir Défauts accessibles par la
commande GetMotionFault, p. 307).
Mais aussi des erreurs dans les groupes suiveurs ou coordonné (nouvelle fonction
commune aux modules TSX CSY 84 / 164) telles que :
z
les groupes non validés comportant un axe en défaut seront signalés en Warning
(%Ixy.i.23 à 1) avec une information donnée par la fonction
GET_MOTION_WARNING : défaut sur membre
(bit 05 ( MW_MEMBER_FAULT) du mot MOTION_WARNING).
Le texte associé sur l’écran PL7 est : "Défaut sur membre groupe".
Ainsi que pour la propagation des défauts et warning (nouvelle fonction commune
aux modules TSX CSY 84 / 164) :
z
z
les axes s’étant arrêtés suite à la propagation des défauts (par les groupes ou par
la fonction de surveillance) seront signalés en Warning (%Ixy.i.23 à 1) avec une
information donnée par la fonction GET_MOTION_WARNING : défaut sur axe
lié (bit 02 ( MW_STOP_BY_SET) du mot MOTION_WARNING).
Le texte associé sur l’écran PL7 est : "Arrêt propagé par groupe".
les groupes, validés ou non, comportant un axe en Warning seront signalés en
Warning (%Ixy.i.23 à 1) avec une information donnée par la fonction
GET_MOTION_WARNING : Warning sur un membre
(bit 04 ( MW_MEMBER_WARNING) du mot MOTION_WARNING).
Le texte associé sur l’écran PL7 est : "Alarme sur membre groupe".
La fonction GetMotionWarning permet de lire les différents types d’avertissements
de mouvement présents.
La mise à 0 du bit AXIS_WARNING est réalisée par un front montant
CONTROL_CLEAR_FAULT.
Application aux
fonctions
Axe réel et
Axe imaginaire
Détection d’un avertissement de mouvement pour l'axe.
Application à la
fonction Groupe
d’axes
coordonnés
Ce bit est positionné à 1 si un bit AXIS_WARNING des axes membres
(AXIS_IS_LINKED) est positionné à 1.
124
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit BIAS_REMAIN (%Ixy.i.24)
Description
Ce bit (état 1) indique qu’un offset est ajouté à la position de commande.
Note : ce bit ne concerne que les fonctions Axe réel et Axe imaginaire.
35009561.01 07/2008
125
Programmation des modules TSX CSY 84 / 164
BIT AXIS_MANUAL_MODE (%Ixy.i.25)
Description
Ce bit permet de contrôler le mode actif courant en lisant la valeur de l’entrée TOR
suivante:
z
z
126
%Ixy.i.25 = 0 : mode auto (par défaut),
%Ixy.i.25 = 1 : mode manuel.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_REALTIME_BIT1 (%Ixy.i.26)
Application à la
fonction Axe réel
Ce bit reflète l'état du bit 1 d’état "temps réel SERCOS®" du variateur.
Application à la
fonction
Axe imaginaire
Non significatif.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
SERCOS®
Ce bit est positionné à 1 si au moins un bit DRIVE_REALTIME_BIT1 des axes
membres (AXIS_IS_LINKED) est positionné à 1.
35009561.01 07/2008
127
Programmation des modules TSX CSY 84 / 164
Bit DRIVE_REALTIME_BIT2 (%Ixy.i.27)
Application à la
fonction Axe réel
Ce bit reflète l'état du bit 2 d’état "temps réel SERCOS®" du variateur.
Application à la
fonction
Axe imaginaire
Non significatif.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs et
SERCOS®
Ce bit est positionné à 1 si au moins un bit DRIVE_REALTIME_BIT2 des axes
membres (AXIS_IS_LINKED) est positionné à 1.
128
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_HOLD (%Ixy.i.28)
Description
Ce bit (état 1) indique que l'axe est arrêté en pause suite à une fonction Hold.
Ce bit est positionné à 0 dans les cas suivants :
z
z
un des bits cités ci-dessous est positionné à 1 :
z AXIS_HALT,
z AXIS_FAST_STOP,
z AXIS_HOMING,
z DRIVE_DISABLED,
z AXIS_SUMMARY_FAULT.
l'axe est inactif avec le bit AXIS_IN_COMMAND positionné à 0.
Application aux
fonctions
Axe réel et
Axe imaginaire
Axe arrêté en pause.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs et
SERCOS®
Ce bit est positionné à 1 si tous les bits AXIS_HOLD des axes membres
(AXIS_IS_LINKED) sont positionnés à 1.
35009561.01 07/2008
129
Programmation des modules TSX CSY 84 / 164
Bit AXIS_HALT (%Ixy.i.29)
Description
Ce bit (état 1) indique que l’axe est arrêté et ne peut pas recevoir une commande
de mouvement.
Il est positionné à 1 lorsque le bit ALLOW_MOVE est positionné à 0.
Ce bit est positionné à 0 dans les cas suivants :
z
z
un des bits cités ci-dessous est positionné à 1 :
z AXIS_FAST_STOP,
z AXIS_HOMING,
z DRIVE_DISABLED,
z AXIS_SUMMARY_FAULT.
l'axe est inactif avec le bit AXIS_IN_COMMAND positionné à 0.
Note : le bit ALLOW_MOVE est positionné à 0 dans le registre
CommandeMouvement.
Application aux
fonctions
Axe réel et
Axe imaginaire
Axe arrêté sans possibilité de commandes de mouvement.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs et
SERCOS®
Ce bit est positionné à1 si tous les bits AXIS_HALT des axes membres
(AXIS_IS_LINKED) sont positionnés à 1.
130
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit AXIS_FASTSTOP (%Ixy.i.30)
Description
Ce bit (état 1) indique qu’un axe se trouve dans l'état Fast Stop.
Le bit est positionné à 0 :
z
z
z
z
z
lorsque l’axe est désactivé (ALLOW_ENABLE),
suite à un défaut sur un axe,
lorsque l’axe est réactivé (CONTROL_ENABLE),
si un des bits DRIVE_DISABLED ou AXIS_SUMMARY_FAULT est positionné à
1,
si l'axe est inactif avec le bit AXIS_IN_COMMAND positionné à 0.
Application aux
fonctions
Axe réel et
Axe imaginaire
Axe dans l'état FastStop.
Application aux
fonctions
Groupe d’axes
coordonnés,
Groupe d’axes
suiveurs et
SERCOS®
Ce bit est positionné à 1 si tous les bits AXIS_FASTSTOP des axes membres
(AXIS_IS_LINKED) sont positionnés à 1.
35009561.01 07/2008
131
Programmation des modules TSX CSY 84 / 164
Bit AXIS_READY (%Ixy.i.31)
Description
Ce bit (état 1) indique que l'axe est prêt à répondre à une commande de
mouvement.
L'axe est actif avec les bits :
z
z
z
z
z
z
z
z
AXIS_IN_COMMAND positionné à 1,
DRIVE_DISABLED positionné à 1,
AXIS_HOMING positionné à 0,
AXIS_HOLD positionné à 0,
AXIS_HALT positionné à 0,
AXIS_FAST_STOP positionné à 0,
AXIS_NOT_FOLLOWING positionné à 0,
AXIS_SUMMARY_FAULT positionné à 0.
Application aux
fonctions
Axe réel,
Axe imaginaire et
Groupe d’axes
coordonnés
Axe prêt à répondre à une commande de mouvement.
Application à la
fonction Groupe
d’axes suiveurs
L'ensemble est actif et prêt à être commandé pour suivre l'axe maître.
Application à la
fonction
SERCOS®
Ce bit est positionné à 1 si tous les bits AXIS_READY des axes individuels (Axe réel,
Axe Imaginaire et Axe à Consigne Externe) sont positionnés à 1.
132
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bit CONF_OK (%Ixy.i.32)
Description
Ce bit (état 1) indique que l'axe est configuré.
Note : ce bit ne concerne que les fonctions Axe réel et Axe imaginaire.
35009561.01 07/2008
133
Programmation des modules TSX CSY 84 / 164
6.2
Fonctions de commande de mouvement
Présentation
Objet de ce
sous-chapitre
Cette section décrit les fonctions de commande d’un mouvement.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
134
Sujet
Page
Fonctions de commande de mouvement : Généralités
135
Règles de gestion des bits ALLOW et CONTROL
136
Bits CommandeMouvement modifiables sur front
137
Bits de commande modifiables sur changement d’état
138
Bits et mots d'état
139
Mode manuel
140
Fonction Set_Functional_Mode
143
Fonction Home
144
Prise d’origine avec la fonction Home
146
Fonction ForcedHomed
147
Fonction Unhome
148
Fonction SetPosition
149
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonctions de commande de mouvement : Généralités
Fonctions de
commande de
mouvement
Les fonctions de commande de mouvement permettent, pour un EnsembleMouvement (Axe réel, Axe Imaginaire, Axe à Mesure Externe , Groupe d’axes Suiveurs
, Réseau, ou Groupe d’axes Coordonnés), d’effectuer les opérations suivantes :
z Réinitialiser les états de défaut d'un EnsembleMouvement (ClearFault),
z Activer ou désactiver un EnsembleMouvement (EnableDrive et DisableDrive),
z Arrêter rapidement ou non un EnsembleMouvement (FastStop et Halt),
z Suspendre ou reprendre un EnsembleMouvement (Hold et resume),
z Ramener à l'origine un axe de mouvement (Home),
z Déplacer l'axe de mouvement en dehors de la position d'origine : (Unhome),
z Libérer et prendre le contrôle des axes isolés membres d'un Groupe Suiveur ou
d'un Groupe Coordonné (Release et Acquire),
z Activer ou désactiver le suivi du maître pour un groupe d’axes esclaves
(FollowOn et FollowOff),
z Prendre le contrôle et activer ou libérer et désactiver des axes esclaves dans un
groupe de suivi (Link et UnLink).
Les fonctions qui effectuent toutes ces opérations lancent une commande de
mouvement puis reviennent à l'applicatif, parfois avant que la commande ne soit
terminée.
L'applicatif doit surveiller l'Etat du GroupeMouvement pour déterminer si la
commande a terminé son exécution.
L'applicatif surveille le bit d'état (%I) de l'axe pour vérifier l'Etat du mouvement.
Commandes de
mouvement
De nombreuses commandes sont également envoyées au travers des bits de
commande de mouvement.
Certaines commandes de mouvement nécessitent un bit ALLOW de façon à les
configurer avant de pouvoir exécuter la commande sans problème.
Les bits ALLOW sont positionnés à 1 par défaut, à l’initialisation du module (sauf le
bit ALLOW_ENABLE de la voie Réseau), de façon à autoriser toutes les
commandes de mouvement correspondantes.
35009561.01 07/2008
135
Programmation des modules TSX CSY 84 / 164
Règles de gestion des bits ALLOW et CONTROL
Principe
La gestion des bits de commande de mouvements (Voir Variables de sortie
échangées de manière implicite, p. 359) s’effectue de la manière suivante :
z en début de programme, positionner à 1 le bit ALLOW_ENABLE (%Qxy.i.0.26)
de la voie 0,
z pour activer / désactiver une fonction, utiliser les bits CONTROL / ALLOW :
z un front montant du bit CONTROL avec le bit ALLOW à 1 active la fonction,
z le bit ALLOW à 0 désactive la fonction.
Bits ALLOW
Les bits ALLOW activent une commande sur front descendant du bit (passage de
l’état 1 à l’état 0). Il a un effet d'interdiction lorsque le bit est à l’état 0. Lorsque le bit
ALLOW passe de l’état 0 à l’état 1, cela supprime l'effet inhibiteur et autorise les
commandes associées.
La présymbolisation des bits ALLOW commencent par ALLOW_ (Voir Interface
langage, p. 341).
REMARQUE : Les bits ALLOW sont initialisés à l’état 1.
Bits CONTROL
Les bits CONTROL activent une commande sur front montant du bit. La commande
est émise; elle sera prise en compte si le GroupeMouvement est dans un état
permettant à la commande de s'effectuer. Il est donc indispensable de vérifier l'état
de mouvement (EtatMouvement) du GroupeMouvement pour avant d’activer une
commande. Les bits CONTROL sont associés à un bit d'autorisation (ALLOW). Une
des raisons courantes pour laquelle un bit CONTROL ne peut activer une
commande provient du fait que le bit ALLOW associé à cette commande ou à la voie
SERCOS® a la valeur 0.
Les noms des bits CONTROL commencent par CONTROL_ (Voir Interface
langage, p. 341).
Cas particuliers
la durée de l’impulsion doit être supérieure au temps de cycle du module
(Cycle_time = 4 ms par défaut), afin que la commande soit "vue" par le module,
Exemple
Fonction ENABLE
CONTROL_ENABLE (%Qxy.i.10)
ALLOW_ENABLE (%Qxy.i.26)
Axe validé :
DRIVE_ENABLED (%Ixy.i.10)
136
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bits CommandeMouvement modifiables sur front
Bits ALLOW
Le tableau ci-dessous donne la liste des bits ALLOW :
Objet
langage
Nom
Description
%Qxy.i.18 ALLOW_ACQUIRE
Front descendant : libère les axes contrôlés. Le bit
AXIS_IN_COMMAND (EtatMouvement) est positionné à 0
lorsque les axes sont libérés.
Action d'inhibition (état 0) : empêche l'acquisition par ce
GroupeMouvement des axes contrôlés.
Bit CONTROL associé : CONTROL_ACQUIRE
%Qxy.i.26 ALLOW_ENABLE
Front descendant : désactive les axes contrôlés. Le bit
DRIVE_DISABLED (EtatMouvement) est positionné à 1
lorsque les axes sont désactivés.
Action d'inhibition (état 0) : empêche l'activation du
GroupeMouvement.
Bit CONTROL associé : CONTROL_ENABLE
%Qxy.i.27 ALLOW_FOLLOW
Front descendant : interdit le suivi d'un GroupeSuiveur ou d'un
membre d'un tel groupe. Le bit AXIS_IS_LINKED
(EtatMouvement) est positionné à 0 lorsque le suivi est inactif.
Action d'inhibition (état 0) : interdit l'activation du suivi.
Bit CONTROL associé : CONTROL_FOLLOW
%Qxy.i.28 ALLOW_RESUME
Front descendant : envoi une suspension aux axes contrôlés.
Le bit AXIS_HOLD (EtatMouvement) est positionné à 1 lorsque
le profil de mouvement est suspendu avec une vitesse nulle.
Action d'inhibition (état 0) : interdit la reprise. Maintient la
suspension lorsque les axes sont activés.
Bit CONTROL associé : CONTROL_RESUME
%Qxy.i.29 ALLOW_MOVE
Front descendant :émet une commande d'arrêt. Le bit
AXIS_HALT (EtatMouvement) est positionné lorsque le
processus d'arrêt démarre.
Action d'inhibition (0) : interdit les commandes de mouvement.
Maintient l'arrêt lorsque les axes sont activés.
%Qxy.i.30 ALLOW_NOT_ FASTSTOP Front descendant : envoie une commande FastStop aux axes
contrôlés. Le bit AXIS_FASTSTOP (EtatMouvement) est
positionné à 1.
Action d'inhibition (état 0) : interdit les mouvements et reste en
état FastStop lorsque les axes sont activés.
Front montant : annule l'état FastStop si les axes sont
alimentés. Le bit AXIS_FASTSTOP (EtatMouvement) est
positionné à 0.
%Qxy.i.31 ALLOW_NOT_FAULT
35009561.01 07/2008
Front descendant : provoque un défaut utilisateur. Le bit
AXIS_SUMMARY_FAULT (EtatMouvement) est positionné à
1.
Action d'inhibition (état 0) : impose le défaut utilisateur.
137
Programmation des modules TSX CSY 84 / 164
Bits de commande modifiables sur changement d’état
Bits CONTROL
138
Le tableau ci-dessous donne la liste des bits CONTROL :
Objet
langage
Nom
Description
%Qxy.i.2
CONTROL_ ACQUIRE
Front montant : commande d'acquisition des axes contrôlés
et liaison de ces axes au GroupeMouvement. Le bit
AXIS_IN_COMMAND est positionné à 1 si l'opération s'est
effectuée correctement.
Bit ALLOW associé : ALLOW_ACQUIRE
%Qxy.i.6
REALTIME_CONTROL_BIT1 Front montant : active la commande IDN associée lorsque
celle-ci est configurée dans le variateur.
%Qxy.i.7
REALTIME_CONTROL_BIT2 Front montant : active la commande IDN associée lorsque
celle-ci est configurée dans le variateur.
%Qxy.i.10
CONTROL_ENABLE
Front montant : active les axes contrôlés. Le bit
DRIVE_ENABLED est positionné à 1 si le variateur est
valide.
Bit ALLOW associé : ALLOW_ENABLE
%Qxy.i.11
CONTROL_FOLLOW
Front montant : active le suivi du GroupeSuiveur ou d'un
membre d'un tel groupe. Le bit AXIS_IS_LINKED est
positionné à 1 lorsque le suivi est actif.
Bit ALLOW associé : ALLOW_FOLLOW
%Qxy.i.12
CONTROL_RESUME
Front montant : reprise à partir d'une suspension
(ALLOW_RESUME). Le bit AXIS_HOLD (EtatMouvement)
est positionné à 0 lorsque la reprise démarre.
Bit ALLOW associé : ALLOW_RESUME
%Qxy.i.15
CONTROL_CLEAR_ FAULT
Front montant : efface les défauts de mouvements
(DéfautMouvement). Le bit AXIS_SUMMARY_FAULT est
positionné à 0 si l'opération s'est effectuée correctement.
%Qxy.i.4
CONTROL_JOG_ POS
Front montant : réalise des mouvements continus dans le
sens positif.
Front descendant : stoppe le mouvement en cours
%Qxy.i.5
CONTROL_JOG_ NEG
Front montant : réalise des mouvements continus dans le
sens négatif.
Front descendant : stoppe le mouvement en cours
%Qxy.i.13
CONTROL_INC_ POS
Front montant : réalise des mouvements incrémentaux dans
le sens positif.
%Qxy.i.14
CONTROL_INC_NEG
Front montant : réalise des mouvements incrémentaux dans
le sens négatif.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Bits et mots d'état
Introduction
Les bits d'état (%I) donnent l'état du module de commande d'axes (automate) et du
variateur de vitesse.
La figure ci-dessous illustre un profil de mouvement comportant différents états.
resume() issued here
ACTUAL MOTION
hold() issued here
COMMANDED
MOTION
RAMPING
{
MOTION
STATES
RAMPING
RAMPING
STEADY
RAMPING
STEADY
STOPPING
HOLDING RESUMING
AXIS_READY
35009561.01 07/2008
RAMPING
STEADY
AXIS_HOLD
IN_POSITION,
AXIS_AT_TARGET
PROFILE_END
AXIS_READY
139
Programmation des modules TSX CSY 84 / 164
Mode manuel
Introduction
Ce mode permet de réaliser, à l'aide de commandes spécifiques, des mouvements
continus ou incrémentaux sur des axes réels ou imaginaires.
Note : ce mode est disponible :
z par programme avec un module TSX CSY 84 de version SV ≥ 1.2 ou avec un
module TSX CSY 164 (toutes versions),
z via l'écran de mise au point du logiciel Unity Pro de version 4.3 ou supérieure.
Les mouvements manuels utilisent la vitesse configurée par défaut (1/2 VMax). Il est
cependant possible de modifier :
z
z
z
la configuration de la vitesse par défaut via l'écran de mise au point ou par
programme (voir (Voir: Module de commande de mouvement SERCOS - Manuel
de mise en oeuvre - Paramètre de vitesse : DefaultSpeed)),
la vitesse du mouvement à l'aide de la fonction Set_Speed_Override (voir (Voir:
Module de commande de mouvement SERCOS - Manuel de mise en oeuvre Fonctions GetSpeedOverride et SetSpeedOverride)),
la valeur de l'incrément dans l'unité de position choisie via l'écran de mise au
point.
Il est également possible de référencer l'axe à l'origine ou à un point particulier via
l'écran de mise au point ou par programme (voir (Voir: Module de commande de
mouvement SERCOS - Manuel de mise en oeuvre - Fonction Home) et (Voir:
Module de commande de mouvement SERCOS - Manuel de mise en oeuvre Fonction ForcedHomed) et (Voir: Module de commande de mouvement SERCOS Manuel de mise en oeuvre - Fonction SetPosition)).
En mode manuel, les commandes suivantes sont indisponibles :
z
z
z
140
Movelmmed (Voir: Module de commande de mouvement SERCOS - Manuel de
mise en oeuvre - Fonction MoveImmed) et MoveQueue (Voir: Module de
commande de mouvement SERCOS - Manuel de mise en oeuvre - Fonction
MoveQueue),
Pause (%Qr.m.c.28) et Resume (%Qr.m.c.12),
Following (%Qr.m.c.11) et Enable (%Qr.m.c.2).
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Accès au mode
manuel
Le mode manuel est accessible depuis l'écran de mise au point ou par programme
(voir (Voir: Module de commande de mouvement SERCOS - Manuel de mise en
oeuvre - Fonction Set_Functional_Mode)).
Note : par défaut, après reconfiguration, l'axe est en mode Auto.
Les différentes
commandes
Quatre commandes permettent de réaliser les différents mouvements.
Nom
Description
Jog+
permet sur front montant de réaliser des mouvements continus dans le sens positif
(1).
permet sur front descendant de stopper le mouvement en cours.
Jog-
permet sur front montant de réaliser des mouvements continus dans le sens négatif
(1).
permet sur front descendant de stopper le mouvement en cours.
Inc+
permet sur front montant de réaliser des mouvements incrémentaux sur un axe
référencé dans le sens positif (2).
Inc-
permet sur front montant de réaliser des mouvements incrémentaux sur un axe
référencé dans le sens négatif (2).
Légende
(1)
Les valeurs limites de déplacement sont :
z les butées logicielles dans le cas d'un axe référencé,
z le maximum de la position théorique de l'axe dans le cas d'un axe non
référencé.
(2)
35009561.01 07/2008
Incrément donné en millième par rapport à l'unité choisie.
La valeur de l'incrément choisie doit satisfaire au respect des valeurs limites
de déplacement de l'axe minorées de la valeur de la fenêtre au point.
141
Programmation des modules TSX CSY 84 / 164
Conditions de
validation
La prise en compte des différentes commandes est subordonnée aux conditions
suivantes :
z
z
z
z
z
le variateur doit être validé,
le mode manuel est activé pour l'axe spécifié,
l'axe est arrêté,
deux commandes ne peuvent être envoyées simultanément,
si l'axe est référencé et se trouve en dehors des butées logicielles, le sens du
mouvement doit être tel qu'il permette de revenir dans les butées logicielles.
Note : l'absence d'une de ces conditions fait apparaître un message relatif à la
condition manquante.
Exception : si le module reçoit dans le même cycle et pour le même axe un front
descendant sur la commande Jog en cours et un front montant sur une autre
commande manuelle, seul le front descendant est pris en compte.
142
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction Set_Functional_Mode
Description
La fonction Set_Functional_Mode permet d’accéder au mode manuel.
Note : ce mode est disponible pour les axes réels et imaginaires.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets langage
Le tableau ci-dessous présente les différents objets langage liés à la fonction
Set_Functional_Mode.
Objet
Nom
%MWxy.i.26 ACTION_CMD
Code fonction Description
2572
Commande
%MDxy.i.20
PARAM_CMD_1 -
Valeur à écrire (1)
%MWxy.i.19
ERROR_CMD
Compte rendu d’erreur. Voir Commande
WRITE_CMD : Erreurs de
programmation, p. 325.
-
Légende
(1) Ecrire la valeur :
0 pour passer en mode manuel
1 pour abandonner le mode manuel
Entrée TOR
associée
Il est possible de contrôler le mode actif courant en lisant la valeur de l’entrée TOR
suivante :
Objet
Nom
Description
%Ixy.i.25
AXIS_MANUAL_MODE
0 : Mode Auto (par défaut)
1 : Mode manuel
Note : La valeur de l’entrée change après l’arrêt du moteur si le changement de
mode est effectué en mouvement.
35009561.01 07/2008
143
Programmation des modules TSX CSY 84 / 164
Fonction Home
Description
Cette fonction permet d’envoyer une demande de prise d’origine au variateur de
vitesse.
Note : le type de prise d’origine doit être préalablement défini dans le variateur.
REMARQUE : Les butées de position programmables ne sont pas actives tant que
la prise d'origine d'un axe ne s'est pas terminée correctement ou que la fonction
ForcedHome n'a pas été appelée.
REMARQUE : Les contacts de fin de course doivent être connectés avant la prise
d'origine du fait que le variateur peut utiliser ces entrées pour déterminer le moment
où il doit inverser son mouvement.
ATTENTION
Au cours d’une opération de prise d’origine, toute tentative pour
interrompre cette opération avant la fin se traduit par un arrêt de l’axe
et la signalisation d’un défaut. Il sera alors nécessaire d’acquitter ce
défaut avant de pouvoir de nouveau déplacer l’axe.
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
Action de la
fonction sur l’axe
réel
L'axe doit être activé et dans l'état AXIS_IN_COMMAND. Il ne doit pas se déplacer,
ne pas être en suspension (Hold), ni en défaut et avoir le bit ALLOW_MOVE
(CommandeMouvement) positionné à 1 pour que la commande s'exécute sans
problème.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre soit :
z
z
144
directement par le positionnement de bits (échanges implicites),
à l’aide de l’instruction WRITE_CMD (voir WRITE_CMD, p. 349).
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Objets Langage
associés
Echanges implicites : Le tableau ci-dessous présente les différents objets langage
liés à cette fonction.
Objet
Nom
Prise en compte
Description
%Qxy.i.29
ALLOW_MOVE
Etat 1
Bit d’autorisation
%Qxy.i.228
ALLOW_RESUME
Etat 1
Bit d’autorisation
%Qxy.i.30
ALLOW_NOT_FASTSTOP
Etat 1
Bit d’autorisation
%Ixy.i.5
AXIS_HOMED
-
Bit d’état
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
Objet
35009561.01 07/2008
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
6034
Commande
%MFxy.i.31
PARAM_CMD_3
-
Sens de la routine de prise d'origine :
1.0 (positif) ou -1.0 (négatif)
%MFxy.i.33
PARAM_CMD_4
-
Vitesse de la routine de prise
d'origine exprimée en UnitésVitesse
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
145
Programmation des modules TSX CSY 84 / 164
Prise d’origine avec la fonction Home
Comment
effectuer la prise
d'origine avec
des variateurs
SERCOS®
Le détecteur d'origine doit être connecté à l'entrée du variateur. La position idéale
du détecteur d'origine correspond à 180 degrés de l'impulsion nulle du résolveur ou
du top du codeur lorsque le mouvement a lieu dans le sens de retour à l'origine
spécifié. Le placement de cette transition dans une zone de +/- 45 degrés autour de
l'impulsion nulle du résolveur ou du top du codeur entraîne un défaut de prise
d'origine (à moins que le défaut d'origine soit désactivé par le logiciel de
configuration du variateur). Il est possible de déterminer le placement du détecteur
en lisant le paramètre d'erreur de placement, SERCOS IDN S-0298 ou IDN US0298, si le variateur le supporte.
La séquence de prise d'origine se décompose en deux opérations :
z
z
recherche du détecteur d’origine,
déplacement à l’origine.
Pendant chacune de ces opérations, une fonction Halt, FastStop ou DisableDrive
envoyée au contrôleur de mouvement provoque l'abandon de la prise d'origine avec
un AXIS_SUMMARY_FAULT; l'axe restera dans l'état hors origine. Si la fonction
Hold est envoyée pendant la première opération, la prise d'origine est abandonnée
avec un AXIS_SUMMARY_FAULT; l'axe restera dans l'état hors origine. Les
fonctions Hold et Resume sont autorisées pendant la seconde opération.
Note : pendant cette opération, le variateur recherche le détecteur d'origine lors
du mouvement vers l'origine dans le sens spécifié. Le variateur, en fonction du
fabricant, peut inverser le sens s'il rencontre un contact de fin de course, ou s'il
rencontre le détecteur d'origine mais pas dans le sens spécifié. (Voir la description
de la prise d'origine dans la documentation de votre variateur SERCOS).
En général, cette opération implique les événements suivants :
z Le variateur détermine dans quel sens le mouvement de l'axe doit commencer :
z si le détecteur Origine indique NON PRESENT, l'axe se déplace dans le
sens spécifié pour la prise d'origine.
z si le détecteur Origine est détecté, l'axe se déplace dans le sens opposé à
celui spécifié pour la prise d'origine de façon à quitter le détecteur d'origine.
146
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction ForcedHomed
Description
Cette fonction permet de forcer la prise d’origine d’un axe. Cette fonction est utilisée
au cours de la procédure de retour manuel à l'origine. L'application peut déplacer
l'axe à une position connue, envoyer une fonction SetPosition pour attribuer une
valeur connue à la mesure de position, puis envoyer la fonction ForcedHome. Le
contrôleur de mouvement active ensuite les butées logicielles, et le bit
AXIS_HOMED est positionné à 1.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
6039
Commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
147
Programmation des modules TSX CSY 84 / 164
Fonction Unhome
Description
Cette fonction permet d’annuler la prise d’origine d’un axe
ATTENTION : Les butées de position logicielles du contrôleur de mouvement n'ont
aucun effet lorsque qu'un axe n'est pas référencé. L'exécution de la fonction
Unhome fait que les butées de position logicielles sont ignorées. Utilisez les
contacteurs de fin de course (EOT) connectés directement au variateur pour
protéger les éléments mécaniques d'un mouvement intempestif lorsque l'axe n'est
pas référencé.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instructionWRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echanges implicites : Le tableau ci-dessous présente les différents objets langage
liés à cette fonction.
Objet
Nom
Prise en compte
Description
%Ixy.i.6
AXIS_HOMED
-
Bit d’état
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
148
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
6038
Commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction SetPosition
Description
La fonction SetPosition modifie la valeur de la position de l'axe en lui attribuant la
valeur donnée. La modification n'est possible que si l'axe ne se déplace pas. La
position mesurée est modifiée dans le module de commande d’axes. Cette fonction
ne modifie pas la valeur de la position dans le variateur. Ceci signifie que, si le
logiciel de mise en service de l'axe surveille le variateur au moyen d'une connexion
directe au variateur, la position affichée ne sera pas la valeur modifiée. Cependant,
les positions surveillées ou commandées par le module de commande d’axes
refléteront le nouveau paramètre.
La fonction Home efface tous les paramètres de position précédents générés par la
fonction SetPosition.
ATTENTION
Dans le cas d’un suivi avec BIAS_REMAIN, la prise en compte sur
l’esclave de l’offset résultant est signalée sur le bit %Ixy.i.24. Tant que
ce bit est positionné à 1, la commande SET_POSITION est interdite.
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(Voir WRITE_CMD, p. 349)).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
2053
Commande
%MFxy.i.31
PARAM_CMD_3
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
149
Programmation des modules TSX CSY 84 / 164
6.3
Fonctions de mouvement
Présentation
Objet de ce
sous-chapitre
Cette section décrit les fonctions de mouvement.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
A propos des fonctions de mouvement
150
Page
151
Type de données MoveType
153
Fonction MoveImmed
154
Fonction MoveQueue
156
Fonction GetMoveQueueLength
158
Fonction GetSpeedOverride et SetSpeedOverride
159
Fonction EnableRealTimeCtrlBit
160
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
A propos des fonctions de mouvement
Structure d’une
fonction MOVE
La structure de base d'une fonction de mouvement est la suivante :
<fonction Move>(<type mouvement>, <position cible>, <vitesse vers cible>)
où :
z fonction Move est soit :
MoveImmed : abandon de tout profil de mouvement en cours et déplacement
vers la nouvelle position cible.
MoveQueue : mélange d'un profil de mouvement avec la fin d'un profil en cours
pour atteindre la nouvelle position cible.
z type mouvement est soit :
ABS_MOVE : Mouvement absolu (nécessite que l’axe soit référencé). .
La position cible est calculée avec la position absolue référencée à partir de la
position d'origine. Le mouvement va au plus court (faire attention, si les modulos
sont activés).
ABS_MOVE_POS : Mouvement absolu dans le sens positif pour les axes ayant
les modulos activés ou les axes coordonnés.
ABS_MOVE_NEG : Mouvement absolu dans le sens négatif pour les axes ayant
les modulos activés ou les axes coordonnés.
INCR_MOVE : Mouvement incrémental. La position cible est prise en tant que
valeur incrémentale référencée à partir de la position actuelle (pour MoveImmed)
ou à partir de la dernière position cible mélangée (MoveQueue).
CONT_MOVE : Mouvement continu. La position cible indique le sens d'un profil
de mouvement continu qui se déplace vers les butées logicielles.
z position cible est un nombre réel qui spécifie la position de la cible exprimée dans
les unités de position par défaut de l'axe.
z vitesse vers cible est un nombre réel qui spécifie la vitesse d'approche exprimée
dans les unités de vitesse par défaut de l'axe.
35009561.01 07/2008
151
Programmation des modules TSX CSY 84 / 164
Fonctionnement
La fonction MOVE lance le mouvement. Elle revient à l'application avant la fin du
profil de mouvement. L'applicatif utilise les bits d’état (%I) pour déterminer l'état du
profil de mouvement. (Voir Bits et mots d'état, p. 139).
Les fonctions ABS_MOVE qui spécifient une position cible en dehors des butées
logicielles de l'axe de mouvement génèrent une ErreurMouvement du fait que l'axe
de mouvement ne peut atteindre la cible. Les fonctions INCR_MOVE qui génèrent
une cible en dehors des limites ne génèrent pas une ErreurMouvement puisque que
le calcul de la position cible peut prendre du retard du fait du mécanisme de file
d'attente des mouvements. De tels mouvements INCR_MOVE sont convertis en
position cible pour atteindre la limite et génèrent un défaut
AXIS_SUMMARY_FAULT lorsque la limite est atteinte. Les vitesses d'approche
supérieures à la vitesse maximale pour un axe de mouvement sont converties en
vitesse d'approche Max. définie eb configuration.
Etat Mouvement
152
Les bits IN_POSITION et AXIS_AT_TARGET sont positionnés à 0 au démarrage
d'un mouvement. Le bit RAMPING est positionné à 1 lorsque l'axe de mouvement
reçoit une commande d'accélération ou de décélération. Le bit STEADY est
positionné à 1 lorsque l'axe de mouvement reçoit une commande Move à vitesse
constante. STOPPING est positionné à 1 au début de la décélération vers la position
cible. IN_POSITION est positionné à 1 lorsque la position réelle et la position cible
sont comprises dans la fenêtre au point après que STOPPING soit positionné à 1.
PROFILE_END est positionné à 1 lorsque le contrôleur commande à l'asservissement de rester à la position cible. AXIS_AT_TARGET est positionné à 1 lorsque
la position réelle et la position cible sont comprises dans la fenêtre au point après
que PROFILE_END soit positionné à 1. STOPPING sera positionné à 0 lorsque
l'axe aura atteint la fin du profil (PROFILE_END) et sera dans la fenêtre au point
(IN_POSITION).
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Type de données MoveType
Description
Le déplacement d'un axe vers une position (mouvement) peut être soit incrémental,
soit continu, soit absolu :
z Incrémental : le mouvement a lieu par rapport à la position actuelle,
z Continu : l'axe se déplace vers la position maximale ou minimale qui est utilisée
comme position cible du mouvement,
z Absolu : l'axe se déplace vers une position absolue.
Valeur du type de
donnée
Le tableau suivant donne les différentes valeurs du type de donnée :
Type de mouvement
Valeur
ABS_MOVE
0
INCR_MOVE
1
CONT_MOVE
2
ABS_MOVE_POS
3
ABS_MOVE_NEG
4
ABS_MOVE_UNLINK *
10
CONT_MOVE _UNLINK *
12
ABS_MOVE_POS _UNLINK *
13
ABS_MOVE_NEG _UNLINK *
14
ABS_MOVE_NO_ROLLOVER *
20
ABS_MOVE_NO_ACC_CORRECTION **
30
INCR_MOVE_NO_ACC_CORRECTION **
31
*Fonction non traitée dans ce chapitre ; voir le chapitre suivant (voir Description
globale de la fonction, p. 162).
**Fonction non traitée dans ce chapitre ; voir le chapitre suivant (Voir: Module de
commande de mouvement SERCOS - Manuel de mise en oeuvre - Fonction de
mouvement pour un groupe coordonné compatible avec la fonction MMS Quantum).
35009561.01 07/2008
153
Programmation des modules TSX CSY 84 / 164
Fonction MoveImmed
Description
Cette fonction provoque le déplacement de l'axe spécifié vers une position donnée
à la vitesse spécifiée. Le mouvement a lieu immédiatement et est prioritaire sur tout
autre mouvement en cours. Le mouvement en cours et tout autre mouvement en file
d'attente sont supprimés.
Un mouvement immédiat peut être :
Incrémental : le mouvement a lieu par rapport à la position actuelle.
z Continu : l'axe se déplace vers la position maximale ou minimale. La position
minimale ou maximale est utilisée comme position cible de la fonction Move.
z Absolu : le mouvement absolu entraîne le déplacement de l'axe vers une position
absolue.
z
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
Objet
Nom
Code
fonction
Description
%MWxy.i.26
ACTION_CMD
513
Commande
%MDxy.i.27
PARAM_CMD_1
-
Type de mouvement (1)
%MDxy.i.29
PARAM_CMD_2
-
Cœfficient appliqué à l’accélération et la décélération
configurée, exprimé en pour mille (1 ≤ x ≤10000). voir
opcode 2172, axe réel (voir Fonctions de réglage,
p. 376) ou axe imaginaire (voir Fonctions de réglage,
p. 380).
%MFxy.i.A (3)
PARAM_CMD_ B (3) -
Position cible de l’axe N (2)
%MFxy.i.C (4) PARAM_CMD_D (4) -
Vitesse d'approche de la cible de l’axe N’ (5)
%MWxy.i.19
Compte rendu d’erreur. Voir Commande
WRITE_CMD : Erreurs de programmation, p. 325.
ERROR_CMD
-
Légende
(1) : INCR_MOVE, ABS_MOVE, ABS_MOVE_POS, ABS_MOVE_NEG ou CONT_MOVE
(2) : N= 1 pour un axe indépendant, N compris entre 2 et 8 pour un groupe d’axes coordonnés.
(3) : A = [31+2(N-1)], B = [3+(N-1)]
(4) : C = [31+2(N+N’-1)], D = [3+(N+N’-1)
(5) : N’ = Position de l’axe dans le groupe
154
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Exemple de
paramètres dans
le cas d’un
groupe d’axes
coordonnés
35009561.01 07/2008
Soit un mouvement avec 2 axes membres :
z PARAM_CMD_1 (%MDxy.i.27) = Type de mouvement
z PARAM_CMD_3 (%MFxy.i.31) = Position de l’axe 1
z PARAM_CMD_4 (%MFxy.i.33) = Position de l’axe 2
z PARAM_CMD_5 (%MFxy.i.35) = Vitesse d’approche de l’axe 1
z PARAM_CMD_6 (%MFxy.i.37) = Vitesse d’approche de l’axe 2
155
Programmation des modules TSX CSY 84 / 164
Fonction MoveQueue
Description
Cette fonction provoque le déplacement de l'axe spécifié vers la position donnée à
la vitesse spécifiée.
Cette fonction est ajoutée à la suite de tout mouvement en cours d'exécution ou en
attente d'exécution. La fonction MoveQueue est mélangée à la trajectoire en cours
sans arrêt à la fin de la commande de mouvement précédemment exécutée. Il est
possible de placer en file d'attente 32 mouvements au maximum.
Toutes les entrées de la file d'attente sont supprimées lorsqu'une fonction
MoveImmed, Halt ou FastStop est exécutée, ou lorsque un défaut
AXIS_SUMMARY_FAULT ou DRIVE_FAULT se produit.
Une fonction MoveQueue peut être :
Incrémentale : le mouvement a lieu par rapport à la dernière position en file
d'attente.
z Absolu : le mouvement absolu entraîne le déplacement de l'axe vers une
position absolue.
z Continu : l'axe se déplace vers la position maximale ou minimale. La position
minimale ou maximale est utilisée comme position cible de la fonction de
mouvement.
z
AVERTISSEMENT
Une fonction MoveQueue envoyée après un mouvement continu ne
s'exécutera jamais. Le mouvement continu se mettra en défaut
lorsqu'une butée de position sera atteinte et que les mouvements en file
d'attente seront effacés.
Le non-respect de ces instructions peut provoquer la mort, des
blessures graves ou des dommages matériels.
156
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
Objet
Nom
Code
Description
fonction
%MWxy.i.26
ACTION_CMD
520
%MDxy.i.27
PARAM_CMD_1
-
Type de mouvement (1)
%MDxy.i.29
PARAM_CMD_2
-
Cœfficient appliqué à l’accélération et la décélération
configurée, exprimé en pour mille (1 ≤ x ≤10000). voir
opcode 2172, axe réel (voir Fonctions de réglage,
p. 376) ou axe imaginaire (voir Fonctions de réglage,
p. 380).
%MFxy.i.A (3)
PARAM_CMD_ B (3) -
Commande
Position cible de l’axe N (2)
%MFxy.i.C (4) PARAM_CMD_D (4) -
Vitesse d'approche de la cible de l’axe N’ (5)
%MWxy.i.19
Compte rendu d’erreur. Voir Commande WRITE_CMD
: Erreurs de programmation, p. 325.
ERROR_CMD
-
Légende
(1) : INCR_MOVE, ABS_MOVE, ABS_MOVE_POS, ABS_MOVE_NEG ou CONT_MOVE
(2) : N= 1 pour un axe indépendant, N compris entre 2 et 8 pour un groupe d’axes coordonnés.
(3) : A = [31+2(N-1)], B = [3+(N-1)]
(4) : C = [31+2(N+N’-1)], D = [3+(N+N’-1)
(5) : N’ = Position de l’axe dans le groupe
Exemple de
paramètres dans
le cas d’un
groupe d’axes
coordonnés
35009561.01 07/2008
Soit un mouvement avec 2 axes membres :
z PARAM_CMD_1 (%MDxy.i.27) = Type de mouvement
z PARAM_CMD_3 (%MFxy.i.31) = Position de l’axe 1
z PARAM_CMD_4 (%MFxy.i.33) = Position de l’axe 2
z PARAM_CMD_5 (%MFxy.i.35) = Vitesse d’approche de l’axe 1
z PARAM_CMD_6 (%MFxy.i.37) = Vitesse d’approche de l’axe 2
157
Programmation des modules TSX CSY 84 / 164
Fonction GetMoveQueueLength
Description
La fonction GetMoveQueueLength renvoie le nombre d'entrées en file d'attente pour
l'axe spécifié.
Lorsque ce nombre est supérieur à 1, l'axe se déplace sans à coup selon un
mouvement composite. La fonction MoveQueue place les entrées dans la file. Les
entrées sont supprimées de la file d'attente lorsque le mouvement d'un axe est
planifié (mouvement en cours et mouvement suivant).
Si une fonction GetMoveQueueLength est exécutée immédiatement après que la
première entrée soit placée dans la file d'attente par une fonction MoveQueue, la
valeur renvoyée sera 0. Ceci est dû au fait que le mouvement de l'axe est prévu dès
que l'entrée est placée dans la file. Elle est supprimée par le générateur de
trajectoire avant de pouvoir exécuter la fonction GetMoveQueueLength. Il est
possible de gérer jusqu’à 34 mouvements : 32 mouvements dans la file d’attente, le
mouvement en cours et le mouvement suivant présent dans le générateur de
trajectoire.
Note : la fonction GetMoveQueue renvoie uniquement le nombre d’ebtrées en file
d’attente sans tenir compte de l’entrée en cours ni de l’entrée suivante.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
158
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
9510
Commande
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction GetSpeedOverride et SetSpeedOverride
Description
La fonction GetSpeedOverride renvoie la valeur du coefficient de modulation de
vitesse affecté à un axe.
La fonction SetSpeedOverride définit la valeur du coefficient de modulation de
vitesse affectée à un axe.
La valeur est explicitement définie en pourcentage.
Le coefficient est compris entre 0 et 100.
Un coefficient de modulation de 0% rend l'axe immobile.
Un coefficient de modulation de 100% oblige le déplacement de l'axe à la vitesse
commandée.
Note : le coefficient affecte les valeurs d’accélération et de décélération.
Note : l'axe suit la même trajectoire quelle que soit la valeur du coefficient de
modulation.
Comment utiliser
ces fonctions
Ces fonctions sont mises en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à ces fonctions.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
1513
Commande de lecture
2513
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la commande de lecture
%MFxy.i.31
PARAM_CMD_3
-
Valeur à écrire)
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
159
Programmation des modules TSX CSY 84 / 164
Fonction EnableRealTimeCtrlBit
Description
Cette fonction permet de valider ou d’invalider les bits de contrôle RealTime 1 et 2
(respectivement %Qxy.i.6 et %Qxy.i.7).
La validation provoque l’envoi des bits de contrôle au variateur via le réseau Sercos.
Note : par défaut, ces bits sont inactifs.
Reportez-vous à la documentation IDN pour connaître les commandes associées à
ces bits de contrôle.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instructionWRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
160
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
2562
Commande
%MDxy.i.27
PARAM_CMD_1
-
1 = Validation
0 = Dévalidation.
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
6.4
Fonction de mouvement à la désactivation de
suivi
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre présente les fonctions permettant d’enchaîner un mouvement à la
désactivation de suivi. Ces commandes sont basée sur le "MoveImmed" et
"MoveQueue".
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Description globale de la fonction
35009561.01 07/2008
Page
162
Fonction "MoveImmed"
163
Fonction "MoveQueue"
165
161
Programmation des modules TSX CSY 84 / 164
Description globale de la fonction
Objectif
L’objectif est d’enchaîner un mouvement à la désactivation de suivi.
Ces fonctions s’exécutent avec les commandes "MoveImmed (voir Fonction
"MoveImmed", p. 163)" et "MoveQueue (voir Fonction "MoveQueue", p. 165)" avec
différents types de mouvements.
Type de
mouvement
162
Le tableau suivant donne les différentes valeurs de la donnée :
Type de mouvement
Valeur
Description
ABS_MOVE_UNLINK
10
Mouvement absolu (au plus près si l’axe est
configuré avec modulo)
CONT_MOVE _UNLINK
12
Mouvement continu
ABS_MOVE_POS _UNLINK
13
Mouvement absolu, sens positif imposé (axe
avec modulo actif)
ABS_MOVE_NEG _UNLINK
14
Mouvement absolu, sens négatif imposé (axe
avec modulo actif)
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction "MoveImmed"
Objectif
Cette commande permet de réaliser une désactivation de suivi d’un axe membre
d’un groupe suiveur puis d’exécuter, sans à coup ni arrêt, un mouvement.
Appel de la
fonction
Modulo
Fonctionnalité
Cote visée
Cette commande est basée sur la commande "MoveImmed" actuelle (opcode 513)
(voir Fonction MoveImmed, p. 154).
Cette commande concerne les axe réels ou les axes imaginaires membres d’un
groupe suiveur configuré en ratio sur suivi de consigne et en BIAS_REMAIN.
Les axes doivent être liés.
Condition initiales :
z
z
le maître est un axe imaginaire ou un réel,
la vitesse du maître est supposée constante entre la désactivation de suivi et les
4 cycles SERCOS suivants,
Quand un mouvement de ce type particulier est en cours, le bit de status
"RESUMING" est à 1. Ce bit est mis à 0 par le système aprés l’exécution du
mouvement.
Objet
35009561.01 07/2008
Type
Symbole
Explication
Commentaire
%MW xy.i.19
Mot
ERROR_CMD
Code d’Erreur *
%MD xy.i.20
Double mot
RETURN_CMD_1
non utilisé
%MF xy.i.22
Flottant
RETURN_CMD_2
non utilisé
%MF xy.i.24
Flottant
RETURN_CMD_3
non utilisé
%MW xy.i.26
Mot
ACTION_CMD
513
%MD xy.i.27
Double mot
PARAM_CMD_1
10 ou 12 ou 13 ou 14 Type
MoveImmed
163
Programmation des modules TSX CSY 84 / 164
Objet
Type
Symbole
Explication
Commentaire
%MD xy.i.29
Double mot
PARAM_CMD_2
Cœfficient
Accélération /
Décélération
Cœfficient appliqué à
l’accélération et la décélération
configurée, exprimé en pour
mille (1 ≤ x ≤10000). voir
opcode 2172, axe réel (voir
Fonctions de réglage, p. 376)
ou axe imaginaire (voir
Fonctions de réglage, p. 380).
%MF xy.i.31
Flottant
PARAM_CMD_3
Position cible
%MF xy.i.33
Flottant
PARAM_CMD_4
Vitesse cible
* Cas de refus d’une commande :
z
z
z
tous les cas de refus de commande existants du "MoveImmed" ,
l’axe doit être lié (CMD_NOT_ALLOWED : refus commande = 50),
pas de fonction d’enchaînement d’un mouvement lors d’une désactivation de
suivi déjà en cours (CMD_NOT_ALLOWED : refus commande = 50).
Cas d’abandon de la commande bit7 MW_MERGE_UNLINK (voir Avertissements
de Mouvement, p. 312) :
certaines conditions sont indispensables et doivent être respectées pour l’exécution
de la commande.
Si une de ces conditions est fausse, la commande est abandonnée :
z
z
z
z
Remarques
Cas d’un axe esclave avec modulo actif et type de mouvement sens imposé (13 ou
14) :
z
z
164
réglage de l’esclave en ratio, suivi sur consigne, mode BIAS_REMAIN,
l’état de l’axe doit être : AXIS_READY = 1,
l’axe maître du groupe ne doit pas être à mesure externe,
il ne doit pas y avoir de mouvement additionnel sur l’axe et pas de pause en cours
( AXIS_HOLD = 0 et HOLDING = 0).
si l'axe est à l'arrêt le déplacement sera "au plus" d'un tour,
si l'axe est préalablement en mouvement :
z si la distance à parcourir et si la pente de décélération le permettent, l'axe
pourra passer à la vitesse cible demandée avant de s'arrêter,
z si ce n'est pas le cas , le module calculera le nombre de tours minimum à
effectuer pour s'arrêter à la position absolue demandée (en respectant la
pente de décélération).
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction "MoveQueue"
Objectif
Cette commande permet de préparer son mouvement qui sera exécuté, sans à coup
ni arrêt, au moment de la désactivation de suivi d’un axe membre d’un groupe
suiveur.
Cette commande ne réalise pas de désactivation de suivi de l’axe.
Appel de la
fonction
Commande
UNILINK
Modulo
Fonctionnalité
Cote visée
Cette commande est basée sur la commande "MoveQueue" actuelle (opcode 520)
(voir Fonction MoveQueue, p. 156).
Cette commande concerne les axe réels ou les axes imaginaires membres d’un
groupe suiveur configuré en ratio sur suivi de consigne et en BIAS_REMAIN.
Les axes doivent être liés.
Condition initiales :
z
z
le maître est un axe imaginaire ou un réel,
la vitesse du maître est supposée constante entre la désactivation de suivi et les
4 cycles SERCOS suivants,
Le fait qu’un mouvement additionnel sera exécuté sur l’axe esclave après la
désactivation de suivi (le "MoveQueue" est en attente) est remonté au niveau de
l’axe par le bit de status RESUMING. Ce bit est mis à 0 par le système après
l’exécution du mouvement.
Objet
Type
%MW xy.i.19 Mot
Explication
Commentaire
Code d’Erreur
%MD xy.i.20
Double mot RETURN_CMD_1
non utilisé
%MF xy.i.22
Flottant
RETURN_CMD_2
non utilisé
%MF xy.i.24
Flottant
RETURN_CMD_3
%MW xy.i.26 Mot
35009561.01 07/2008
Symbole
ERROR_CMD
ACTION_CMD
non utilisé
520
MoveQueue
165
Programmation des modules TSX CSY 84 / 164
Objet
Type
Explication
Commentaire
%MD xy.i.27
Double mot PARAM_CMD_1
Symbole
Type
10 ou 12 ou 13 ou 14
%MD xy.i.29
Double mot PARAM_CMD_2
Cœfficient
Cœfficient appliqué à l’accélération et
Accélération / la décélération configurée, exprimé en
Décélération pour mille (1 ≤ x ≤10000). voir opcode
2172, axe réel (voir Fonctions de
réglage, p. 376) ou axe imaginaire (voir
Fonctions de réglage, p. 380).
%MF xy.i.31
Flottant
PARAM_CMD_3
Position cible
%MF xy.i.33
Flottant
PARAM_CMD_4
Vitesse cible
Cas de refus d’une commande :
z
z
z
tous les cas de refus de commande existants du "MoveQueue" (voir Commande
WRITE_CMD : Erreurs de programmation, p. 325),
l’axe doit être lié (CMD_NOT_ALLOWED : refus commande = 50),
pas de fonction d’enchaînement d’un mouvement lors d’une désactivation de
suivi déjà en cours (CMD_NOT_ALLOWED : refus commande = 50).
Cas d’abandon de la commande bit7 MW_MERGE_UNLINK (voir Avertissements
de Mouvement, p. 312) :
certaines conditions entre l’envoi de la commande et le déclenchement du Unlink
sont indispensables et doivent être respectées pour l’exécution de la commande.
Si une de ces conditions disparaît, le mouvement à enchaîner est abandonné :
z
z
z
z
Remarques
Cas d’un axe esclave avec modulo actif et type de mouvement sens imposé (13 ou
14) :
z
z
166
réglage de l’esclave en ratio, suivi sur consigne, mode BIAS_REMAIN,
l’état de l’axe doit être : AXIS_READY = 1 (voir Bit AXIS_READY (%Ixy.i.31),
p. 132),
l’axe maître du groupe ne doit pas être à mesure externe,
au moment de la désactivation de suivi il ne doit pas y avoir de mouvement
additionnel sur l’axe et pas de pause en cours (AXIS_HOLD = 0 et HOLDING =
0).
si l'axe est à l'arrêt le déplacement sera "au plus" d'un tour,
si l'axe est préalablement en mouvement :
z si la distance à parcourir et si la pente de décélération le permettent, l'axe
pourra passer à la vitesse cible demandée avant de s'arrêter,
z si ce n'est pas le cas , le module calculera le nombre de tours minimum à
effectuer pour s'arrêter à la position absolue demandée (en respectant la
pente de décélération).
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
6.5
Fonctions de position/vitesse courante
Présentation
Objet de ce souschapitre
Ce sous-chapitre décrit les fonctions de position et de vitesse courante.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
FonctionGetActualSpeed
35009561.01 07/2008
Page
168
FonctionGetCommandSpeed
169
Service compteur de Modulo
170
Fonction GetUnrolledPosition
171
Fonction GetUnrolledCommandedPosition
172
Fonction GetCommandedPosition
173
167
Programmation des modules TSX CSY 84 / 164
FonctionGetActualSpeed
Description
La fonction GetActualSpeed renvoie la valeur courante de la vitesse de
déplacement de l'axe spécifié.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Le tableau ci-dessous présente les différents objets langage liés à cette fonction.
168
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
5065
Commande
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
FonctionGetCommandSpeed
Description
La fonction GetCommandSpeed renvoie la valeur courante de la vitesse de la
consigne de l'axe spécifié.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Le tableau ci-dessous présente les différents objets langage liés à cette fonction.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
5066
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
Commande
169
Programmation des modules TSX CSY 84 / 164
Service compteur de Modulo
Objectif
Compter le nombre de modulo.
Présentation
Cette commande concerne :
z
z
les axes réels configurés avec Modulo,
les axes imaginaires configurés avec Modulo.
Objet
Type
%MW xy.i.19 Mot
Symbole
Explication
Commentaire
ERROR_CMD
%MD xy.i.20 Double mot RETURN_CMD_1 NB_MODULO Nombre de modulo (sens
positif ou négatif)
%MF xy.i.22
Flottant
RETURN_CMD_2
%MF xy.i.24
Flottant
RETURN_CMD_3
%MW xy.i.26 Mot
ACTION_CMD
573
%MD xy.i.27 Double mot PARAM_CMD_1
0
%MD xy.i.29 Double mot PARAM_CMD_2
0
%MF xy.i.31
Flottant
PARAM_CMD_3
0
%MF xy.i.33
Flottant
PARAM_CMD_4
0
ReadNBModulo
En interne, dans le TSX CSY, la position courante (valeur du NB_MODULO)
repasse à 0 lors :
z
z
170
d'une prise d'origine 6034 (voir Fonction Home, p. 144),
d'un forçage de position 2053 (voir Fonction SetPosition, p. 149) à l’intérieur du
tour.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction GetUnrolledPosition
Description
La fonction GetUnrolledPosition renvoie la position sans modulo d'un axe.
Note : il n'est pas indispensable que le modulo de l'axe soit activé pour pouvoir
utiliser cette fonction.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
546
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
Commande
171
Programmation des modules TSX CSY 84 / 164
Fonction GetUnrolledCommandedPosition
Description
La fonction GetUnrolledCommandedPosition renvoie la consigne de position
instantanée sans modulo actuellement envoyée au variateur.
La commande de position instantanée change en permanence pendant le
déplacement de l'axe. Elle est égale à la position cible d'un profil de mouvement
uniquement lorsque l'axe est arrêté et que le bit AXIS_AT_TARGET est positionné
à 1.
Note : il n'est pas indispensable que le modulo de l'axe soit activé pour pouvoir
utiliser cette fonction.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
172
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
547
Commande
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction GetCommandedPosition
Description
La fonction GetCommandedPosition renvoie la consigne de position instantanée
actuellement envoyée au variateur.
La commande de position instantanée change en permanence pendant le
déplacement de l'axe. Elle est égale à la position cible d'un profil de mouvement
uniquement lorsque l'axe est arrêté et que le bit AXIS_AT_TARGET est positionné
à 1.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
1053
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
Commande
173
Programmation des modules TSX CSY 84 / 164
6.6
Fonctions de suivi
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre décrit les fonctions de suivi.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
174
Sujet
Page
A propos des fonctions de suivi
175
Fonction "activation de suivi sur cible"
178
Fonction "Estimation du temps restant avant l’activation du suivi"
180
Arrêt de suivi (Unlink) du groupe suiveur déclenché par un trigger
182
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
A propos des fonctions de suivi
Activation du
suivi
Vous pouvez activer le suivi en appelant les fonctions Link (WRITE_CMD) ou
FollowOn (échanges implicites). Vous pouvez désactiver le suivi en appelant les
fonctions UnLink (WRITE_CMD) ou FollowOff (échanges implicites).
Le suivi ne démarre pas immédiatement à son activation: l'envoi d'une commande
d'activation du suivi déclenche une séquence d'événements et le suivi n'est pas pris
en compte avant la fin de ces événements. Pour l'axe suiveur, le bit
AXIS_IS_LINKED indique le moment où le suivi a réellement lieu.
Lorsque le suivi démarre réellement, les axes suiveurs suivent l'axe maître. Si le
maître est sous le contrôle du contrôleur de mouvement multiaxes, l'applicatif
commande à l'axe maître de se déplacer pour réaliser le mouvement de suivi
voulue.
Mouvements
lorsque le suivi
est actif
Il se peut que le maître soit en cours d'exécution d'un mouvement lorsque le suivi
est activé.
z
z
En mode Ratio, l'axe suiveur accélère à la vitesse voulue.
En mode Came, l'axe suiveur accélère rapidement pour atteindre la vitesse
correspondant au profil de came.
Il se peut que le suiveur soit en cours d'exécution d'un mouvement lorsque le suivi
est activé, dans les conditions suivantes :
z Si le bit FOLL_ON_HALT de ModeSuiveur est positionné à 1, cette commande
de mouvement en cours reçoit un ordre d'arrêt lorsque le suivi est déclenché.
Ceci annule le mouvement; le mouvement résultant de l'axe suiveur est
uniquement basé sur le suivi de l'axe maître.
z Si le bit FOLL_ON_HALT de ModeSuiveur n'est pas positionné à 1, cette
commande de mouvement en cours n'est pas arrêtée. Le mouvement résultant
de l'axe suiveur est la somme du mouvement de suivi du maître et du mouvement
de la commande en cours d'exécution.
35009561.01 07/2008
175
Programmation des modules TSX CSY 84 / 164
Mouvements
lorsque le suivi
est inactif
Il se peut que le maître soit en cours d'exécution d'un mouvement lorsque le suivi
est désactivé.
z
z
En mode Ratio, le rapport de suivi est amené à 0 au moyen de la décélération
configurée. Ceci arrête le mouvement de l'axe suiveur basé sur le suivi de l'axe
maître.
En mode Came, l'axe suiveur s'arrêtera immédiatement de suivre le maître sans
décélération.
Il se peut que le suiveur soit en cours d'exécution d'un mouvement (en plus du suivi
du maître) lorsque le suivi est désactivé, dans les conditions suivantes :
z Si le bit FOLL_BIAS_REMAINS du ModeSuiveur est positionné à 0, le profil de
mouvement en cours reçoit un ordre d'arrêt. L'axe suiveur atteint une vitesse
nulle à la fin de toute décélération du mouvement de suivi du maître et lorsque
l'arrêt de la commande de mouvement en cours a lieu. Le suivi est alors
désactivé et le bit EtatMouvement AXIS_IS_LINKED est positionné à 0.
z Si le bit FOLL_BIAS_REMAINS de ModeSuiveur est positionné à 1, cette
commande de mouvement en cours n'est pas arrêtée. Le mouvement de suivi de
l'axe maître est alors nul, et le bit AXIS_IS_LINKED est positionné à 0. L'axe
suiveur continue à se déplacer conformément à la commande de
mouvement en cours. Le BiasSuiveurAbsolu reste effectif jusqu'à ce que l'axe
suiveur reçoive une commande d'arrêt ou de désactivation (%Ixy.i.24 = 1). Ceci
signifie que toute commande ABS_MOVE sera décalée de la valeur
BiasSuiveurAbsolu.
Pour commander un mouvement absolu sur un axe suiveur lorsque BiasSuiveurAbsolu est effectif, vous devez soustraire la valeur BiasSuiveurAbsolu de la
position commandée :
position commandée = position souhaitée - BiasSuiveurAbsolu
Lorsque l'axe suiveur exécute une commande d'arrêt ou de désactivation, le
BiasSuiveurAbsolu est automatiquement remis à zéro; il est alors possible
d'envoyer des commandes de position normales.
Activation du
suivi en modes
Ratio ou Came
176
Dans chacun de ces modes, l'activation du suivi entraîne le calcul par le contrôleur
de mouvement d'une nouvelle valeur BiasSuiveur. Cette nouvelle valeur est choisi
de façon à empêcher l'axe suiveur de se déplacer, en fonction de la position actuelle
du maître et du Ratio (pour le mode Ratio) ou du ProfilCame (pour le mode Came).
Vous pouvez ajuster BiasSuiveur avec toute valeur souhaitée après l'activation du
suivi ou en envoyant une commande de mouvement incrémental à l'axe suiveur.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Remarque
En mode Ratio, la valeur BiasSuiveur change avec le Ratio. Surveillez la valeur
BiasSuiveur après la mise à 0 du bit RAMPING de l'axe suiveur.
Note : biasSuiveur : Delta de position entre le maître et l’esclave.
35009561.01 07/2008
177
Programmation des modules TSX CSY 84 / 164
Fonction "activation de suivi sur cible"
Objectif
Cette fonction permet d'assurer la synchronisation en position d'un axe esclave et
d'un axe maître à une position prédéterminer.
Cette synchronisation est effectuée par l'utilisation des fonctions "SetMasterTriggerPosition" et "FollowOn".
Fonctionnement
L'axe esclave est arrêté alors que l'axe maître est en mouvement.
L'utilisateur arme la fonction par le biais de l'OPCODE 574 "LinkOnTarget ". Dés
réception de la requête le coupleur calcule la position seuil du maître.
Lorsque la position de l'axe maître franchit le seuil calculé par le système, l’axe
esclave démarre son mouvement selon la rampe d'accélération configurée.
Link On Target (574)
V
PM=PT (Return 2)
PM= Position Cible Maître (Param 3)
VM
RXVM
PS= Position Cible
Esclave (Param 4)
t
0
(574)
Tlink (Return 3)
L'axe esclave tient compte :
z
z
z
z
z
z
du couple "Position cible de l’axe maître et esclave",
de la position courante du maître,
de la vitesse courante du maître ,
de la position courante de l'esclave,
du ratio Maître/Esclave,
de l’accélération configurée de l’esclave.
Cette fonction est applicable dans le cas où le maître reste à vitesse constante entre
l'instant de lancement de la fonction et l'activation de suivi
"bit AXIS_IS_LINKED = 1 (voir Bit AXIS_IS_LINKED (%Ixy.i.17), p. 119)". De plus
le maître ne peut être un axe à mesure externe.
178
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction "
LinkOnTarget"
z
z
z
z
On autorise les deux sens de rotation (positif et négatif),
l'axe maître peut être réel ou imaginaire,
l’axe maître peut être configuré en modulo,
l’axe esclave peut être configuré en modulo.
La commande est passée via un WRITE_CMD adressé à la voie du groupe suiveur :
Objet
Type
%MW xy.i.19 Mot
Symbole
Explication
ERROR_CMD
Commentaire
Refus de commande *
%MD xy.i.20
Double mot RETURN_CMD_1
%MF xy.i.22
Flottant
RETURN_CMD_2
Position de déclenchement du maître
(équivalent à la fonction
"GetMasterTriggerPosition (voir
Lecture du dernier trigger de position
affecté par la commande
SetTriggerUnlink, p. 183)"
%MF xy.i.24
Flottant
RETURN_CMD_3
Temps restant avant l’activation de
suivi de l’esclave (en secondes)
%MW xy.i.26 Mot
574
LinkOnTarget
%MD xy.i.27
Double mot PARAM_CMD_1
ACTION_CMD
SlaveNumber
Adresse SERCOS de l’esclave à lier
%MD xy.i.29
Double mot PARAM_CMD_2
0
non utilisé
%MF xy.i.31
Flottant
PARAM_CMD_3
MasterPosition
Position cible de l’axe maître
%MF xy.i.33
Flottant
PARAM_CMD_4
SlavePosition
Position cible de l’axe esclave
* Refus de commande :
z
z
z
z
z
z
z
z
z
esclave déjà lié : 69
esclave en mouvement : 70
maître à l'arrêt : 72
mauvais sens de rotation du maître : 71
maître non configuré : 37
maître est un axe à mesure externe : 37
esclave non configuré dans ce groupe : 37
esclave non configuré : 7003
groupe non configuré : 7002
Remarques :
la vitesse du maitre doit rester constante entre le moment de la demande
d'activation de suivi et l'activation de suivi ("bit AXIS_IS_LINKED = 1 (voir Bit
AXIS_IS_LINKED (%Ixy.i.17), p. 119)").
35009561.01 07/2008
179
Programmation des modules TSX CSY 84 / 164
Fonction "Estimation du temps restant avant l’activation du suivi"
Objectif
Estimer le temps restant avant l’activation du suivi d’un axe esclave dans un groupe
suiveur.
Fonctionnement
Cette focntion peut être utilisée sur un groupe suiveur. L'axe esclave considéré est
à l'arrêt. L'axe maître est en mouvement. Une demande d'activation de suivi est en
cours sur l'axe esclave. Cette fonction renvoie une estimation du temps restant
avant l'activation effective du suivi de l'esclave, "bit AXIS_IS_LINKED =1 (voir Bit
AXIS_IS_LINKED (%Ixy.i.17), p. 119)". C'est-à-dire la somme du temps nécessaire
à l'axe maître pour atteindre le seuil de position attendu par l'esclave et du temps
nécessaire à l'axe esclave pour atteindre sa vitesse de consigne (vitesse du maître
* ratio de suivi). Cette fonction suppose que la vitesse du maître restera constante
entre l'instant où cette focntion est lancée et l'instant où le suivi de l'esclave sera
activé
180
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Fonction
"GetTimeToLink
"
z
z
z
z
On autorise les deux sens de rotation,
l'axe maître peut être réel ou imaginaire,
l’axe maître peut être configuré en modulo,
l’axe esclave peut être configuré en modulo.
La commande est passée via un WRITE_CMD adressé à la voie du groupe suiveur :
Objet
Type
%MW xy.i.19 Mot
Symbole
%MD xy.i.20
Double mot RETURN_CMD_1
%MF xy.i.22
Flottant
RETURN_CMD_2
%MF xy.i.24
Flottant
RETURN_CMD_3
%MW xy.i.26 Mot
Explication
ERROR_CMD
ACTION_CMD
%MD xy.i.27
Double mot PARAM_CMD_1
%MD xy.i.29
Double mot PARAM_CMD_2
%MF xy.i.31
Flottant
PARAM_CMD_3
%MF xy.i.33
Flottant
PARAM_CMD_4
Commentaire
Refus de commande *
Estimation du temps restant avant
l’activation du suivi de l’esclave
575
GetTimeToLink
SlaveNumber
Adresse SERCOS de l’esclave
* Refus de commande :
z
z
z
z
z
z
z
z
maître non configuré : 37
maître est un axe à mesure externe : 37
esclave non configuré : 37
esclave déjà lié : 69
esclave en mouvement : 70
maître à l'arrêt : 72
accélération esclave nulle : 1
mauvais sens de rotation du maître : 71
Remarques :
la vitesse du maitre doit rester constante entre le moment où cette commande est
utilisée et l’activation du suivi, ("bit AXIS_IS_LINKED = 1 (voir Bit AXIS_IS_LINKED
(%Ixy.i.17), p. 119)").
35009561.01 07/2008
181
Programmation des modules TSX CSY 84 / 164
Arrêt de suivi (Unlink) du groupe suiveur déclenché par un trigger
Objectif
Arrêt de suivi d'un axe membre d'un groupe suiveur sur trigger de position.
Fonction
"SetTriggerUnlink"
Cette commande concerne :
les axe réels ou imaginaires configurés avec ou sans Modulo et liés.
Cette commande est réalisée par la commande "SetTriggerUnlink" basée sur le
"Write_cmd":
Objet
Type
Symbole
%MW xy.i.19
Mot
ERROR_CMD
Explication
%MD xy.i.20
Double mot
RETURN_CMD_1
%MF xy.i.22
Flottant
RETURN_CMD_2
%MF xy.i.24
Flottant
RETURN_CMD_3
%MW xy.i.26
Mot
ACTION_CMD
2180
%MD xy.i.27
Double mot
PARAM_CMD_1
Numéro de l’esclave
%MD xy.i.29
Double mot
PARAM_CMD_2
Type trigger
Commentaire
Code d’erreur*
%MF xy.i.31
Flottant
PARAM_CMD_3
Position trigger
%MF xy.i.33
Flottant
PARAM_CMD_4
0
SetTriggerUnlink
Nul (0), **
> (1),
< (2),
≥ (3),
≤ (4).
A la réception de la commande, l'axe (membre d'un groupe lié) réalise automatiquement le Unlink dés que la condition du trigger devient vrai.
** Type de trigger :
z
z
z
z
z
0 = désactivation immédiate du suivi,
1 = désactivation du suivi quand la position du maître passe le seuil dans le sens
positif,
2 = désactivation du suivi quand la position du maître passe le seuil dans le sens
négatif,
3 = désactivation du suivi quand la position du maître est supérieure ou égale au
seuil,
4 = désactivation du suivi quand la position du maître est inférieure ou égale au
seuil.
* Code d’erreur : la commande est refusée si :
z
z
z
z
182
l’axe n’est pas lié (CMD_NOT_ALLOW (50)),
la position du trigger est hors butées logicielles (RANGE_ERROR (1)),
le type de trigger est inconnu (RANGE_ERROR (1)),
le numéro d’esclave est invalide.
35009561.01 07/2008
Programmation des modules TSX CSY 84 / 164
Lecture du
dernier trigger de
position affecté
par la commande
SetTriggerUnlink
Cette commande"GetTriggerUnlinkPosition "permet de lire le dernier trigger de
position accepté par un précédent "SetTriggerUnlink" :
Objet
Type
%MW xy.i.19 Mot
Symbole
Explication
Commentaire
ERROR_CMD
Code d’erreur*
%MD xy.i.20 Double mot RETURN_CMD_1
%MF xy.i.22
Flottant
RETURN_CMD_2 Position trigger
%MF xy.i.24
Flottant
RETURN_CMD_3
%MW xy.i.26 Mot
ACTION_CMD
%MD xy.i.27 Double mot PARAM_CMD_1
1180
GetTriggerUnlinkPosition
Numéro de
l’esclave
%MD xy.i.29 Double mot PARAM_CMD_2
%MF xy.i.31
Flottant
PARAM_CMD_3
%MF xy.i.33
Flottant
PARAM_CMD_4
* Code d’erreur : commande refusée si le numéro d’esclave est invalide.
Lecture du
dernier type de
trigger affecté
par la commande
SetTriggerUnlink
Une autre commande "GetTriggerUnlinkType" permet de lire le dernier type trigger
Unlink accepté par un précédent "SetTriggerUnlink" :
Objet
Type
%MW xy.i.19 Mot
Symbole
Explication
ERROR_CMD
Code d’erreur*
%MD xy.i.20 Double mot RETURN_CMD_1 Type trigger
%MF xy.i.22
Flottant
RETURN_CMD_2
%MF xy.i.24
Flottant
RETURN_CMD_3
%MW xy.i.26 Mot
ACTION_CMD
%MD xy.i.27 Double mot PARAM_CMD_1
Commentaire
1181
Nul (0),
> (1),
< (2),
≥ (3),
≤ (4).
GetTriggerUnlinkType
Numéro de
l’esclave
%MD xy.i.29 Double mot PARAM_CMD_2
%MF xy.i.31
Flottant
PARAM_CMD_3
%MF xy.i.33
Flottant
PARAM_CMD_4
* Code d’erreur : commande refusée si le numéro d’esclave est invalide.
35009561.01 07/2008
183
Programmation des modules TSX CSY 84 / 164
184
35009561.01 07/2008
Réglage des modules
TSX CSY 84 / 164
7
Présentation
Objet de ce
chapitre
Ce chapitre décrit le principe de réglage des paramètres du métier SERCOS®.
Contenu de ce
chapitre
Ce chapitre contient les sous-chapitres suivants :
35009561.01 07/2008
Tout ce qui s’applique au module TSX CSY 84 est valable pour le module
TSX CSY 164.
Souschapitre
Sujet
Page
7.1
Réglage d’un module SERCOS(r) : Généralités
186
7.2
Réglage des paramètres d’un axe réel, imaginaire ou à
mesure externe
190
7.3
Paramètres d’un groupe d’axes suiveurs
225
7.4
Réglage d’un profil de came
249
7.5
Paramètres de l’anneau Sercos®
261
7.6
Fonctions de lecture/écriture des IDN SERCOS®
265
185
Réglage des modules TSX CSY 84 /164
7.1
Réglage d’un module SERCOS(r) : Généralités
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre présente les écrans de réglage du module SERCOS(r) et rappelle
quelques principes généraux sur les échanges explicites.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
186
Sujet
Page
Description des écrans de réglage d’un module SERCOS® :Généralités
187
Principes de réglage
189
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Description des écrans de réglage d’un module SERCOS® :Généralités
Introduction
L’écran de réglage affiche les paramètres de réglage d’une voie SERCOS®.
Ces paramètres sont modifiables en mode local ou connecté.
Il donne également accès aux écrans de configuration et de mise au point.
La structure de l’écran de réglage est très similaire à celle de l’écran de
configuration.
Note : consultez la partie Communs fonctions métiers pour une présentation du
processus de configuration, réglage et mise au point d’une application.
Illustration
La figure ci-dessous montre un exemple d’écran de réglage du module TSX CSY 84
:
1
2
3
4
TSX CSY 84 [RACK0 POSITION 10]
Réglage
Désignation : 8 AXIS N4 MOTION.CONT
Symbole :
Voie :
Fonction :
1 Réel
Axe réel
Voies configurées : 0, 1
Butées
Contrôle de position
Position max. 5.000000e+006
Position min. -5.000000e+002
Vitesse max.
5.000000e+005
Accélération max 5.000000e+004
Décélération max5.000000e+002
Ctrl. de position en validation
Actif
Tolérance
0.000000e+000
5
Tâche :
MAST
Unités
Type
Linéaire
Position
Vitesse
µm
µm/s
µm/s²
Accélération
Facteur d’échelle
Numérateur 1.000000e+000
Dénominateur 1.000000e+000
Mouvement
Modulo
Modulo max. 0.000000e+000
Modulo min. 0.000000e+000
Fenêtre au point7.000000e+000
Accélération 1.000000e+002
Décélération 1.000000e+001
Type d’accélération
Rectangle 100 %
Transférer les paramètres du variateur de vitesse
Sens du transfert
Automate -> Variateur de vitesse
Variateur de vitesse -> Automate
Paramétres
Résultats
Tranfert des paramétres du variateur de vitesse
dans la mémoire automate :
Erreur transfert :
Adresse table
Longueur
35009561.01 07/2008
Transférer
%MW
100
22
Longueur de la table lue : 0
200
187
Réglage des modules TSX CSY 84 /164
Description
188
Le tableau ci-dessous présente les différents éléments de l’écran de réglage et leurs
fonctions.
Repère Elément
Fonction
1
Barre de
titre
Rappelle la référence du module sélectionné et sa position physique
dans le rack.
2
Zone de
Indique l’écran en cours (Réglage) et permet de passer ou revenir
commande aux autres écrans :
z Configuration
z Mise au point (ou diagnostic), accessible seulement en mode
connecté.
3
Zone
module
Affiche la désignation du module sélectionné.
Visualise l’état des voyants RUN, ERR, I/O
Fournit un accès direct au diagnostic du module lorsque celui-ci est
en défaut (signalé par le voyant intégré au bouton d’accès au
diagnostic DIAG, qui prend la couleur rouge).
4
Zone voie
Permet de choisir la voie à régler,
Indique la tâche dans laquelle est configurée la voie,
Fournit un accès direct au diagnostic de la voie lorsque celle-ci est en
défaut
5
Zone de
réglage
Cette zone comprend différentes rubriques spécifiques en fonction du
type de voie.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Principes de réglage
Introduction
La fonction réglage permet de visualiser et modifier les paramètres de fonctionnement du module.
le réglage des paramètres des modules TSX CSY 84 / 164 s’effectue soit :
z
z
directement à l’aide des écrans de réglage (mode local ou connecté),
l’intermédiaire d’échanges explicites (voir Interface PL7, p. 342) entre
l’application et le module de commande d’axes (mode connecté).
Note : lorsque la modification des paramètres s’effectue par les fonctions de
réglage Set... (instruction WRITE_CMD), le module n’assure pas la cohérence
avec les valeurs contenues dans les mots internes %MW.
Voies permettant
des échanges
explicites
Les commandes explicites permettent d’échanger des paramètres avec :
z
z
z
35009561.01 07/2008
la voie 0 (Réseau),
les voies 1 à 16 (axes indépendants),
les voies 21 à 24 (groupes d’axes suiveurs).
189
Réglage des modules TSX CSY 84 /164
7.2
Réglage des paramètres d’un axe réel, imaginaire
ou à mesure externe
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre présente les écrans de réglage d’un axe réel, imaginaire ou à
mesure externe ainsi que les différents paramètres accessibles.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Page
Description de l’écran de réglage d’un module SERCOS® : Axes réels ou
imaginaires
190
191
Description de l’écran de réglage d’un module SERCOS® : Axes à mesure externe
193
Description de l’écran TRF_RECIPE pour les axes réels
195
TRF_RECIPE
197
TRF_RECIPE Exemples
199
Paramètre Vitesse : DefaultSpeed
200
Paramètre Vitesse : SpeedLimit
201
A propos des paramètres d’accélération/décélération
202
Paramètre Accélération/Déccélération : Accel
203
Paramètre Accélération/Déccélération : Decel
204
Paramètre Accélération/Déccélération : AccelMax
205
Paramètre Accélération/Déccélération : DecelMax
206
Paramètre Accélération/Déccélération : AccelType
207
Donnée TypeAccélération
209
Paramètres résolution : GearRatio
210
Paramètre Limite de position et Modulo : PositionLimit
212
A propos du modulo
214
Paramètre Limite de position et Modulo : RolloverLimit
216
Paramètre Limite de position et Modulo : EnableRollover
217
A propos de la fenêtre au point
218
Paramètre Limite de position : InPositionBand
219
A propos du mode d’activation
220
Paramètre Limite de position : EnableMode
222
Comportement sur dévalidation d’un axe
224
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Description de l’écran de réglage d’un module SERCOS® : Axes réels ou
imaginaires
Introduction
Cet écran permet de modifier directement en mode connecté les paramètres de
configuration d’un axe réel ou imaginaire.
Note : pour plus dinformations sur les parties communes des diff’érents écrans
de réglage, voir Description des écrans de réglage d’un module SERCOS®
:Généralités, p. 187.
Illustration
La figure ci-dessous montre la zone de réglage d’une voie SERCOS® configurée en
axe réel ou imaginaire.
Butées
Contrôle de position
Position max.
5.000000e+006
Position min.
-5.000000e+002
Vitesse max.
5.000000e+005
Accélération max 5.000000e+004
Décélération max 5.000000e+002
Ctrl. de position en validation
Actif
Tolérance
0.000000e+000
Description
Unités
Type
Linéaire
Position
Vitesse
µm
µm/s
µm/s²
Accélération
Facteur d’échelle
Numérateur 1.000000e+000
Dénominateur 1.000000e+000
0.000000e+000
0.000000e+000
Fenêtre au point 7.000000e+000
Accélération
1.000000e+002
Décélération
1.000000e+001
Type d’accélération
Rectangle 100 %
Le tableau ci-dessous présente la rubrique Butée de la zone de réglage.
Elément
Paramètre
associé
Bit/Mot langage
associé
Symbole/Description
Contôle de position
-
%MWxy.i.35:X4
Cette case à cocher permet
d’activer le contrôle des
butées (limites) de position.
Position max.
PositionLimits
Position min.
35009561.01 07/2008
Mouvement
Modulo
Modulo max.
Modulo min.
%MWxy.i.55
POSITION_MAX
%MWxy.i.57
POSITION_MIN
Vitesse max.
SpeedLimit
%MWxy.i.53
SPEED_MAX
Accélération max.
AccelMax
%MWxy.i.49
ACCEL_MAX
Accélération min.
DecelMax
%MWxy.i.
DECEL_MAX
191
Réglage des modules TSX CSY 84 /164
Le tableau ci-dessous présente la rubrique Ctrl de position en validation de la
zone de réglage.
Elément
Paramètre
associé
Bit/Mot langage
associé
Description
Actif
-
%MWxy.i.35:X1
Cette case à cocher permet
de valider le contrôle de
position.
Tôlérance
-
%MWxy.i.43
Valeur de la fenètre de
contrôle (non modifiable)
Le tableau ci-dessous présente la rubrique Unités de la zone de réglage. Cette
rubrique est non modifiable.
Elément
Paramètre
associé
Mot langage
associé
Symbole
Type
-
%KWxy.i.34
-
Position
PositionUnits
%MWxy.i.65
-
Vitesse
VelocityUnits
%MWxy.i.64
-
Accélération
AccelUnits
%MWxy.i.63
-
Le tableau ci-dessous présente la rubrique Facteur d’échelle de la zone de
réglage.
Elément
Paramètre
associé
Numérateur
GearRatio
Dénominateur
Mot langage
associé
Symbole
%MWxy.i.59
SCALE_NUMERATOR
%MWxy.i.61
SCALE_DENOMINATOR
Le tableau ci-dessous présente la rubrique Mouvement de la zone de réglage.
Elément
Paramètre
associé
Symbole
Modulo
EnableRollover
%MWxy.i.35:X0
ENABLE_ROLLOVER
Modulo max.
RolloverLimit
%MWxy.i.45
ROLLOVER_MAX
Modulo min.
%MWxy.i.47
ROLLOVER_MIN
InPositionBand
%MFxy.i.41
IN_POSITION_BAND
Accélération
Accel
%MWxy.i.36
ACCEL
Décélération
Decel
%MWxy.i.38
DECEL
Type d’accélération
AccelType
%MWxy.i.40
ACCEL_TYPE
Fenêtre au point
192
Bit/Mot langage
associé
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Description de l’écran de réglage d’un module SERCOS® : Axes à mesure
externe
Introduction
Cet écran permet de modifier directement en mode connecté les paramètres de
configuration d’un axe à mesure externe.
Note : pour plus d’informations sur les parties communes des différents écrans
de réglage, voir Description des écrans de réglage d’un module SERCOS®
:Généralités, p. 187.
Illustration
La figure ci-dessous montre la zone de réglage d’une voie SERCOS® configurée en
axe à mesure externe.
Adresse
1
Facteur d’échelle
Numérateur
Dénominateur
35009561.01 07/2008
1.000000e.000
1.000000e.000
Modulo
Actif
Maximum
Minimum
Unités
Position
1.000000e.002
1.000000e.000
193
Réglage des modules TSX CSY 84 /164
Description
Le tableau ci-dessous présente la rubrique Facteur d’échelle de la zone de
réglage.
Elément
Paramètre
associé
Bit/Mot langage associé Symbole/Description
Numérateur
FollowerRatio
%MFxy.i.Y (2)
Dénominateur
NUMERATOR_X (1)
DENOMINATOR_X (1)
Légende
(1) : X compris entre 1 et 8
(2) : Valeur de Y, Voir Paramètre d’un groupe suiveur : FollowerRatio, p. 235.
Le tableau ci-dessous présente la rubrique Modulo de la zone de réglage.
Elément
Paramètre
associé
Bit/Mot langage associé Symbole/Description
Actif
EnableRollover
%MWxy.i.35:X0
ENABLE_ROLLOVER
Maximum
RolloverLimit
%MWxy.i.45
ROLLOVER_MAX
%MWxy.i.47
ROLLOVER_MIN
Minimum
Le tableau ci-dessous présente la rubrique Unités de la zone de réglage. Cette
rubrique est non modifiable.
194
Elément
Paramètre associé Mot langage associé Symbole
Position
PositionUnits
%MWxy.i.65
-
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Description de l’écran TRF_RECIPE pour les axes réels
Introduction
Ces écran, situé au bas de l’écran de réglage d’un axe réel, permet de transférer les
paramètres de réglage entre l’automate et le variateur de vitesse
Cette fonctionnalité nécessite d’être en mode connecté.
Note : pour plus d’informations sur les parties communes des différents écrans
de réglage, voir Description des écrans de réglage d’un module SERCOS®
:Généralités, p. 187.
Illustration
La figure ci-dessous montre l’écran associé à la fonction TRF_RECIPE.
Transférer les paramètres du variateur de vitesse
Sens du transfert
Automate -> Variateur de vitesse
Variateur de vitesse -> Automate
Paramétres
Résultats
Tranfert des paramétres du variateur de vitesse
dans la mémoire automate :
Adresse table
100
%MW
Erreur transfert :
22
Longueur de la table lue :
0
Longueur
35009561.01 07/2008
Transférer
200
195
Réglage des modules TSX CSY 84 /164
Description
Le tableau ci-dessous présente la rubrique Sens du transfert de la zone
TRF_RECIPE.
Elément
Mot langage associé
Symbole
Automate -> Variateur de vitesse
%MWxy.i.10
ACTION_TRF
Variateur de vitesse -> Automate
Le tableau ci-dessous présente la rubrique Paramètres de la zone TRF_RECIPE.
Elément
Mot langage associé
Description
Adresse table
%MDxy.i.11
Deux paramètres sont modifiables :
le type d’objet mémoire pour le stockage des données :
z %MW en lecture écriture
z %KW en lecture seulement
Valeur immédiate
Adresse de début de table
Longueur
Valeur immédiate
Longueur de la table
Le tableau ci-dessous présente la rubrique Résultat de la zone TRF_RECIPE.
Elément
Mot langage associé
Symbole
Erreur transfert
%MWxy.i.3
Ce champ fournit le code d’erreur (voir
Défauts d’écriture explicite d’une commande
TRF_RECIPE, p. 331) en cas de transfert
invalide.
Longueur de la table %MDxy.i.4
lue
196
Longueur réelle de la table
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
TRF_RECIPE
Rappel
Ce service permet avec la fonction "Axe réel", de lire ou d’écrire les paramètres des
variateurs de vitesse.
Note : ce service est également de lire ou d’écrire les profils de came et de lancer
l’exécution de fonctions spéciales (se reporter aux documentations de ces
fonctions).
Syntaxe de
l’instruction
TRF_RECIPE
TRF_RECIPE %CHxy.i (longueur, adresse %MW) : transfert des paramètres du
variateur de vitesse, du profil de came, ou des paramètres d’une fonction spéciale
dans / à partir de la table qui débute à l’adresse %MW. La longueur de cette table à
transférer est définie par le paramètre longueur. L’action a exécuter est définie par
le mot %MWxy.i.10 (ACTION_TRF).
Exemple : TRF_RECIPE %CH104.3(10,100) (chargement des paramètres du
variateur de vitesse de l’axe réel 3, du module situé en position 4 du rack 1, dans la
table de longueur 10, qui débute à l’adresse %MW100).
Interface
TRF_RECIPE
35009561.01 07/2008
La commande à réaliser est définie dans le mot %MWxy.i.10 et le résultat de la
commande est disponible dans le mot %MWxy.i.3 à %MWxy.i.8.
Adresse
Type
Symbole
Signification
%MWxy.i.3
Mot
ERROR_TRF
Erreur d’écriture de la commande
TRF_RECIPE
%MDxy.i.4
Double Mot
RETURN_TRF_1
Retour 1 de la fonction
%MFxy.i.6
Flottant
RETURN_TRF_2
Retour 2 de la fonction
%MFxy.i.8
Flottant
RETURN_TRF_3
Retour 3 de la fonction
%MWxy.i.10
Mot
ACTION_TRF
Action à réaliser
%MDxy.i.11
Double Mot
PARAM_TRF_1
Paramètre 1
%MDxy.i.13
Double Mot
PARAM_TRF_2
Paramètre 2
%MFxy.i.15
Flottant
PARAM_TRF_3
Paramètre 3
%MFxy.i.17
Flottant
PARAM_TRF_4
Paramètre 4
197
Réglage des modules TSX CSY 84 /164
Actions réalisées
par TRF_RECIPE
Les actions qu’il est possible de réaliser avec le service TRF_RECIPE sont :
Fonction
ACTION_TRF
(%MWxy.i.10)
Signification
Axe réel (1)
16001
Chargement des paramètres du variateur de vitesse
dans la mémoire automate.
Axe réel (1)
26001
Déchargement des paramètres du variateur de
vitesse, à partir de la mémoire automate.
Légende
(1)
Echanges
198
PARAM_TRF_1 à PARAM_TRF_4 = 0
Description
1
Chargement des paramètres dans la mémoire sauvegardée (Axe réel, WRITE_CMD)
2
Déchargement des paramètres à partir de la mémoire sauvegardée (Axe réel,
WRITE_CMD)
3
Chargement des paramètres dans la mémoire automate (Axe réel, ACTION_TRF =
16001)
4
Déchargement des paramètres à partir de la mémoire automate (Axe réel,
ACTION_TRF = 26001)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
TRF_RECIPE Exemples
Exemple 1 :
Sauvegarde des
paramètres du
variateur
Transférer pour les sauvegarder les paramètres du variateur de vitesse de l’axe réel
3 du module situé à la position 4 du rack 1, dans les mots internes %MW100 à
%MW1100. La longueur de la table étant de 1000 mots.
!
(*Si pas d’échange de paramètres en cours, alors transfert de la
table de paramètres dans l’automate*)
%MW104.3.10 := 16001;
TRF_RECIPE %CH104.3(1000, 100);
END_IF;
35009561.01 07/2008
199
Réglage des modules TSX CSY 84 /164
Paramètre Vitesse : DefaultSpeed
Description
Ce paramètre permet de définir une valeur par défaut de la vitesse de déplacement
d’un axe exprimée en UnitésVitesse. Move avec la vitesse égale à 0.
Note : par défaut, le système applique une valeur par défaut égale à 1/2 de la
valeur du paramètre SpeedLimit.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetDefaultSpeed qui envoie une requête de lecture de la valeur par défaut
courante,
SetDefaultSpeed qui envoie une requête d’écriture de la nouvelle valeur par
défaut.
Ces fonctions utilisent l’instruction WRITE_CMD.
Objets langage
associés
200
Le tableau ci-dessous présente les différents objets langage liés au paramètre
DefaultSpeed.
Objet
Nom
Code
fonction
Description
%MWxy.i.26
ACTION_CMD
1065
Commande de lecture
2065
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD : Erreurs de
programmation, p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre Vitesse : SpeedLimit
Description
Ce paramètre permet de définir la vitesse maximale d’un axe exprimée en
UnitésVitesse.
Cette limite s’applique à la vitesse envoyée au variateur de vitesse par le module de
commande d’axes.
La vitesse maximale doit être égale ou supérieure à la vitesse courante.
Note : le variateur de vitesse a sa propre limite en vitesse.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetSpeedLimit qui envoie une requête de lecture de la vitesse maximale
courante,
SetSpeedLimit qui envoie une requête d’écriture de la nouvelle vitesse maximale.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
SpeedLimit.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.53
SPEED_MAX
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1066
WRITE_CMD
2066
35009561.01 07/2008
Commande de lecture
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
201
Réglage des modules TSX CSY 84 /164
A propos des paramètres d’accélération/décélération
Définition
L'accélération permet d'augmenter la vitesse d'un axe au cours d'un profil de
mouvement. Les valeurs d'accélération sont limitées à la valeur de l'accélération
maximale.
La décélération permet de diminuer la vitesse d'un axe au cours d'un profil de
mouvement. Les valeurs de décélération sont limitées à la valeur de la décélération
maximale.
La rampe d'accélération/décélération s'applique aux commandes de mouvement
de cet axe.
Organisation des
mouvements
Le générateur de trajectoires utilise cette accélérationdécélération pour calculer les
commandes envoyées au variateur asservi. Le variateur asservi a des paramètres
d'accélération/décélération indépendants. Pour le retour à l'origine, le variateur a
recours au paramètre d'accélération/décélération normalisé SERCOS® (Numéro
d'identification - IDN S-0-0042). Pour les arrêts d'urgence le variateur peut utiliser
une valeur de décélération/décélération particulière. Veuillez vous reporter à la liste
des numéros d'identification propres au constructeur.
Accélération
maximale
L'accélération/décélération maximale du variateur asservi (IDN normalisé SERCOS
S-0-0138 - Limite d'accélération bipolaire ou IDN S-0-0136 - Limite d'accélération
positive) doit être supérieure aux paramètres AccélérationMaxi et DécélérationMaxi
du contrôleur de mouvement.
202
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre Accélération/Déccélération : Accel
Description
Ce paramètre permet de définir la rampe d’accélération à appliquer aux commandes
de mouvement sur un axe.
La valeur de cette accélération est définie avec les unités UnitésAccélération..
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetAccel qui envoie une requête de lecture de la valeur de la rampe
d’accélération courante de l’axe désigné,
SetAccel qui envoie une requête d’écriture de la nouvelle valeur de la rampe
d’accélération de l’axe désigné.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
Accel.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.36
ACCEL
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1041
WRITE_CMD
2041
35009561.01 07/2008
Commande de lecture
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
203
Réglage des modules TSX CSY 84 /164
Paramètre Accélération/Déccélération : Decel
Description
Ce paramètre permet de définir la rampe de décélération à appliquer aux
commandes de mouvement sur un axe.
La valeur de cette décélération est définie avec les unités UnitésAccélération..
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetDecel qui envoie une requête de lecture de la valeur de la rampe de
décélération courante de l’axe désigné,
SetDecel qui envoie une requête d’écriture de la nouvelle valeur de la rampe de
décélération de l’axe désigné.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM, ou WRITE_PARAM.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
AccMax.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.38
DECEL
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1042
WRITE_CMD
2042
204
Commande de lecture
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre Accélération/Déccélération : AccelMax
Description
Ce paramètre permet de définir l’accélération maximale appliquée à un axe.
La valeur de cette accélération est définie avec les unités UnitésAccélération..
Note : l’accélération maximale doit être supérieure ou égale au paramètre
d’accélération courant.
Note : l'accélération maximale du variateur asservi (IDN normalisé SERCOS S-00138 - Limite d'accélération bipolaire ou IDN S-0-0136 - Limite d'accélération
positive) doit être supérieure au paramètre AccélérationMaxi du contrôleur de
mouvement.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetAccelMax qui envoie une requête de lecture de la valeur de l’accélération
maximale courante,
SetAccelMax qui envoie une requête d’écriture de la nouvelle valeur de
l’accélération maximale.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
AccelMax.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.49
ACCEL_MAX
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1116
WRITE_CMD
Commande de lecture
2116
35009561.01 07/2008
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
205
Réglage des modules TSX CSY 84 /164
Paramètre Accélération/Déccélération : DecelMax
Description
Ce paramètre permet de définir la décélération maximale appliquée à un axe.
La valeur de cette décélération est définie avec les unités UnitésAccélération..
Note : la décélération maximale doit être supérieure ou égale au paramètre de
décélération courant.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetDecelMax qui envoie une requête de lecture de la valeur de la décélération
maximale courante,
SetDecelMax qui envoie une requête d’écriture de la nouvelle valeur de la
décélération maximale.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
DecelMax.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.51
DECEL_MAX
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1117
WRITE_CMD
Commande de lecture
-
Résultat de la lecture.
2117
%MFxy.i.22
206
RETURN_CMD_2 -
Commande d’écriture
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre Accélération/Déccélération : AccelType
Description
Ce paramètre permet de définir le type d’accélération de l’axe.
Le type d'accélération précise la forme du profil d'accélération utilisé pour changer
les vitesses d'un axe. Le contrôleur de mouvement permet trois types principaux de
profil d'accélération :
z Rectangulaire : ce profil d'accélération modifie la vitesse dans le temps le plus
court. Il entraîne également les à-coups les plus importants sur l'axe.
z Triangulaire : ce profil d'accélération modifie la vitesse de l'axe dans le temps le
plus long (deux fois plus lent que le profil rectangulaire). Cependant, il entraîne
les à-coups les moins importants sur l'axe.
z Trapézoïdal : le profil trapézoïdal modifie la vitesse plus rapidement que le profil
triangulaire mais plus lentement que le profil rectangulaire. Les à-coups de l'axe
sont plus importants qu'avec le profil triangulaire, mais moins importants qu'avec
le profil rectangulaire. Il existe trois choix possibles pour le profil trapézoïdal;
ceux-ci sont spécifiés par la différence de temps de modification de la vitesse par
rapport au profil rectangulaire :
z 1,25 fois plus long que le profil rectangulaire,
z 1,5 fois plus long,
z 1,75 fois plus long.
Le type d’accélération peut être modifié à tout moment. Il s’appliquera aux
mouvements en file d’attente.
En général, le contrôleur de mouvement traite les commandes en file d’attente en
amont (deux points de déplacement) de l’endroit vers lequel l’axe se déplace.
Note : cette fonction est le seul moyen permettant de changer le type
d’accélération pour un groupe d’axes coordonnés (type rectangulaire par défaut)
Codes
accélération
35009561.01 07/2008
Les types d’accélération possibles sont les suivants :
Code
Type
Description
0
ACCEL_RECTANGULAIRE
t1 = 0, Tacc = Taccrec
1
ACCEL_TRIANGULAIRE
Tacc = 2Taccrec
2
ACCEL_TRAP_125
t2 = 3t1, Tacc = 1,25Taccrec
3
ACCEL_TRAP_150
t1 = t2, Tacc = 1,5Taccrec
4
ACCEL_TRAP_175
t1 = 3t2, Tacc = 1,75Taccrec
207
Réglage des modules TSX CSY 84 /164
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetAccelType qui envoie une requête de lecture du type d’accélération courant,
SetAccelType qui envoie une requête d’écriture du nouveau du type
d’accélération.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
AccelType.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.40
ACCEL_TYPE
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1540
WRITE_CMD
2540
208
Commande de lecture
Commande d’écriture
%MFxy.i.20
RETURN_CMD_1 -
-
Résultat de la lecture.
%MFxy.i.27
PARAM_CMD_1
-
-
Valeur à écrire.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Donnée TypeAccélération
Description
Le type d'accélération précise la forme du profil d'accélération utilisé pour changer
les vitesses d'un axe. Le contrôleur de mouvement permet trois types principaux de
profils d'accélération :
z Rectangulaire : Ce profil d'accélération modifie la vitesse dans le temps le plus
court. Il entraîne également les à-coups les plus importants sur l'axe.
z Triangulaire : Ce profil d'accélération modifie la vitesse de l'axe dans le temps le
plus long (deux fois plus lent que le profil rectangulaire). Cependant, il entraîne
les à-coups les moins importants sur l'axe.
z Trapézoïdal : Le profil trapézoïdal modifie la vitesse plus rapidement que le profil
triangulaire mais plus lentement que le profil rectangulaire. Les à-coups de l'axe
sont plus importants qu'avec le profil triangulaire, mais moins importants qu'avec
le profil rectangulaire. Il existe trois choix possibles pour le profil trapézoïdal;
ceux-ci sont spécifiés par la différence de temps de modification de la vitesse par
rapport au profil rectangulaire :
z 1,25 fois plus long que le profil rectangulaire
z 1,5 fois plus long
z 1,75 fois plus long
Valeur de la
donnée
Le tableau suivant donne les différentes valeurs de la donnée :
35009561.01 07/2008
Type d’accélération
Valeur
ACCEL_RECTANGULAIRE
0
ACCEL_TRIANGULAIRE
1
ACCEL_TRAP_125
2
ACCEL_TRAP_150
3
ACCEL_TRAP_175
4
209
Réglage des modules TSX CSY 84 /164
Paramètres résolution : GearRatio
Description
Ce paramètre permet de définir le ratio entre la position de l’axe et la position du
variateur.
Ratio
Le ratio représente la transmission physique entre un moteur et le point de
déplacement de l'axe (une glissière, une table, une broche, etc.). Il ne doit être
modifié que si la transmission a changé. Il doit être défini avec une valeur valide pour
obtenir un positionnement correct de l'axe. Les fonctions de ratio sont GetGearRatio
et SetGearRatio.
La définition du ratio est la suivante :
unités de position de l'axe / unités de position du variateur
Le ratio est indépendant de la résolution du dispositif d'asservissement du moteur
ainsi que du système d'unités par défaut d'un axe. Il dépend du type d'unités de
l'axe : linéaire ou angulaire.
Voici un exemple pour lequel les unités de position du variateur pour les variateurs
SERCOS sont définies en tours :
z Une vis d'entraînement est fixée au moteur et déplace l'axe de 2 pouces/tour du
moteur; le ratio est défini par pouce(2)/tour(1).
z Une transmission déplace une table rotative de 1 tour pour 10 tours du moteur;
le ratio se définit donc comme tour(1)/tour(10).
Ratio et Axe
imaginaire
Un variateur asservi ne contrôle pas un Axe Imaginaire. Les unités de position du
variateur doivent être les pions codeur. Les unités de position de l'axe peuvent être
n'importe quelles unités linéaires ou angulaires. Le ratio doit représenter des
résolutions types de dispositifs de recopie de position. Par exemple :
Ratio de : tour(1) / pion(65536)
Ratio de : mm(1) / pion(1000)
210
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Ratio et Axe à
consigne externe
La recopie de position d'une ConsigneExterne est le registre d'asservissement de
cet axe. L'entier 32 bits placé dans le registre est censé être exprimé dans les unités
pion. Le ratio est choisi de façon à convertir les unités de l'axe voulu. Par exemple :
Ratio de : tour(1) / pion(10000)
Ratio de : mm(1) / pion(1000)
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetGearRatio qui envoie une requête de lecture du ratio courant,
SetGearRatio qui envoie une requête d’écriture du nouveau ratio.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
Accel.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.59
SCALE_NUMERATOR
-
Commande de lecture
READ_PARAM
WRITE_PARAM Commande d’écriture
%MFxy.i.61
SCALE_DENOMINATOR
-
READ_PARAM
Commande de lecture
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1500
WRITE_CMD
2500
35009561.01 07/2008
Commande de lecture
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2
-
-
Résultat de la lecture
(Numérateur).
%MFxy.i.24
RETURN_CMD_3
-
-
Résultat de la lecture
(Dénominateur).
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire (Numérateur).
%MFxy.i.33
PARAM_CMD_4
-
-
Valeur à écrire (Dénominateur).
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
211
Réglage des modules TSX CSY 84 /164
Paramètre Limite de position et Modulo : PositionLimit
Description
Ce paramètre permet de définir les butées positive et négative de l’axe.
La valeur de ces butées est définie avec les unités UnitésPosition.
Il n'est pas possible d'attribuer à une butée positive ou négative une valeur telle que
la position en cours se trouve en dehors des nouvelles limites des butées. Utilisez
la fonction SetPosition ou une fonction de déplacement pour remplacer la position
en cours par une nouvelle valeur qui se trouve comprise dans les limites de butées
avant de modifier une butée.
Note : les butées de position ne sont actives qu’après la fonction prise d’origine
Home.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetPositionLimit qui envoie une requête de lecture de la valeur de la butée
positive ou négative courante (fonction du paramètre PARAM_CMD_1) de l’axe
désigné,
SetPositionLimit qui envoie une requête d’écriture de la nouvelle valeur de la
butée positive ou négative (fonction du paramètre PARAM_CMD_1) de l’axe
désigné.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
ATTENTION
Lorsqu’un mouvement de type incrémental est demandé et que la
position cible dépasse une limite de position (%MFxy.i.55 et
%MFxy.i.57 de l’axe réel ou imaginaire), le mouvement réalisé prendra
pour objectif la limite de position, et l’axe passera en défaut limite à
la fin du mouvement. Ceci reste vrai lors d’un mouvement de type
coordonné.
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
212
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
PositionLimit.
Objet
Nom
Code
fonction
%MFxy.i.55
POSITION_MAX
-
Type
d’instruction
Description
READ_PARAM
Commande de lecture
WRITE_PARAM Commande d’écriture
%MFxy.i.57
POSITION_MIN
-
READ_PARAM
Commande de lecture
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1505
WRITE_CMD
2505
35009561.01 07/2008
Commande de lecture
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2
-
-
Résultat de la lecture.
%MDxy.i.27
PARAM_CMD_1
-
-
Valeur à écrire :
1 : butée positive
-1 : butée négative
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : Position.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD : Erreurs
de programmation, p. 325)
213
Réglage des modules TSX CSY 84 /164
A propos du modulo
Limites de
modulo
Il est possible de configurer un axe indépendant de façon à sauter la mesure de
position lorsque l'axe atteint la limite de modulo positive ou négative. Le fait de
d’utiliser le modulo oblige la mesure de position à rester dans la plage de valeurs
comprise entre les limites positive et négative du modulo.
Par exemple, dans le cas de la commande d'une table rotative, si vous voulez que
l'axe renvoie des mesures de position angulaire comprises entre 0 et 360 degrés. Si
les modulo sont activés, lorsque l'axe atteint la limite positive du modulo de 360
degrés, la mesure de position saute de façon à reprendre à la valeur limite négative
de 0 degré.
Les mesures de position sont obligatoirement supérieures ou égales à la limite
négative du modulo, ou inférieure à la limite positive du modulo. La position
mesurée n'est jamais égale à la limite positive du modulo. Dans cet exemple de
table rotative, avec des limites de modulo de 0 et 360 degrés, l'axe ne renvoie
jamais une mesure de 360 degrés. Dans ce cas, la mesure renvoyée est 0 degrés.
La différence entre la limite positive et la limite négative du modulo s'appelle la plage
de modulo. Dans l'exemple de la table rotative, la plage de modulo est de 360
degrés, soit 1 tour.
Le limites de modulo positive et négative peuvent avoir n'importe quelle valeur
pourvu que la limite négative soit inférieure et inégale à la limite positive. La limite
négative n'est pas nécessairement négative; il suffit qu'elle soit inférieure à la limite
positive. Dans l'exemple de la table rotative, les limites négative et positive
habituelles peuvent être 0 et 360 degrés, ou -180 et +180 degrés. Des valeurs moins
courantes sont par exemple 360 et 720 degrés. Tous ces paramètres ont une plage
de modulo de 360 degrés.
Il est possible d'activer ou désactiver les modulo pour un axe.
Dans ce cas, les mesures de position ne sont pas sautées; les distances parcourues
par l'axe sont renvoyées sur la base de la position 0. La distance spécifiée est le
résultat de la commande d'origine et de la fonction SetPosition. Cette mesure de
position se nomme la position sans modulo.
214
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Butées de
position et
limites de
modulo
Les limites négative et positive de modulo sont indépendantes des butées de
position positive et négative. Les butées de position sont comparées à la position
sans modulo d'un axe pour déterminer si la fin de course d'un axe a été atteinte. Les
butées doivent être désactivées
Si les butées de position ont été définies avec des valeurs comprises dans la plage
de modulo d'un axe avec modulo activés, le contrôleur de mouvement multi-axes
empêche les axes de se déplacer au-delà des butées de position. Dans cette
configuration, l'axe ne peut se déplacer sans limites.
Dans certaines applications, vous voudrez peut-être définir les butées de position
avec des valeurs supérieures aux limites de modulo. Par exemple, supposons que
votre application commande une table rotative reliée à des câbles. La table ne doit
pouvoir pivoter que de quelques tours avant que le câblage ne s'entortille et
s'endommage. Dans une telle application, vous voudrez certainement définir des
butées de position telles qu'elles limitent le mouvement avant d'endommager le
câblage. Mais vous voudrez également définir les limites de modulo à un tour de la
table. Par exemple, si le câble s'entortille après cinq tours de la table, l'application
définira la butée de position positive avec la valeur (5 tours) et la butée de position
négative avec la valeur (-5 tours). Il est possible de définir des limites de modulo de
0 et 360 degrés. L'axe ne peut alors se déplacer au-delà de 5 tours à partir de son
origine.
35009561.01 07/2008
215
Réglage des modules TSX CSY 84 /164
Paramètre Limite de position et Modulo : RolloverLimit
Description
Ce paramètre permet de définir les limites positive et négative du modulo d’un axe.
Il n'est pas indispensable que le modulo de l'axe soit activé pour pouvoir utiliser
cette fonction. Cette fonction n'active pas le modulo. (Utilisez la fonction
EnableRollover). Il est possible de modifier les limites de modulo lorsqu'un axe est
activé, mais pas lorsqu'il se déplace. La limite négative doit être strictement
inférieure à la limite positive du modulo.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetRolloverLimit qui envoie une requête de lecture de la valeur de la limite
positive ou négative courante (fonction du paramètre PARAM_CMD_1) du
modulo de l’axe désigné,
SetRolloverLimit qui envoie une requête d’écriture de la nouvelle limite positive
ou négative (fonction du paramètre PARAM_CMD_1) du modulo de l’axe
désigné.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
RolloverLimit.
Objet
Nom
Code
fonction
Type
d’instruction
Description
%MFxy.i.45
ROLLOVER_MAX
-
READ_PARAM
Commande de lecture
WRITE_PARAM
Commande d’écriture
READ_PARAM
Commande de lecture
WRITE_PARAM
Commande d’écriture
WRITE_CMD
Commande de lecture
%MFxy.i.47
ROLLOVER_MIN
-
%MWxy.i.26
ACTION_CMD
1539
%MFxy.i.22
RETURN_CMD_2
-
-
Résultat de la lecture.
%MDxy.i.27
PARAM_CMD_1
-
-
Valeur à écrire :
1 : limite positive
-1 : limite négative
2539
216
Commande d’écriture
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : modulo
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD : Erreurs
de programmation, p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre Limite de position et Modulo : EnableRollover
Description
Ce paramètre permet, pour un axe donné, de tenir compte ou non des mesures de
position.
Les arguments de position des commandes de mouvement spécifient la position
cible voulue pour l'axe en terme de positions avec modulo.
Il est possible de modifier ce paramètre lorsqu'un axe est activé et arrêté. Les limites
négative et positive doivent être définies avec les valeurs voulues.
Objets langage
Cette fonction utilise, selon les objets langage, les instructions WRITE_CMD ou
WRITE_PARAM.
Le tableau ci-dessous présente les différents objets langage liés au paramètre
Enable_Rollover.
Objet
Nom
Code
Type
fonction d’instruction
%MWxy.i.35:X0
ENABLE_ROLLOVER
1
WRITE_PARAM Commande d’écriture :
Activation
0
Commande d’écriture :
Désactivation
%MWxy.i.26
ACTION_CMD
411
WRITE_CMD
412
%MWxy.i.19
35009561.01 07/2008
ERROR_CMD
-
Description
Commande d’écriture :
Activation
Commande d’écriture :
Désactivation
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
217
Réglage des modules TSX CSY 84 /164
A propos de la fenêtre au point
Fonctions de
fenêtre au point
Les fonctions de fenêtre au point sont GetInPositionBand et SetInPositionBand (voir
Réglage de la position d’un axe). La fenêtre au point est la tolérance sur la position
d'une cible utilisée pour déterminer les états IN_POSITION et AXIS_AT_TARGET.
Si la valeur absolue de la différence entre la position réelle et la position à atteindre
est inférieure à la fenêtre au point, le Module donne les valeurs suivantes pour
IN_POSITION et AXIS_AT_TARGET suivantes :
z
z
Le bit IN_POSITION est positionné à 1 après l’arrêt de l'axe (bit d’état
STOPPING) à une position cible et si la position de l'axe se trouve dans la fenêtre
au point de la position cible. Il n'est pas positionné à 1 si la position est extérieure
à la fenêtre au point, ou au démarrage du mouvement suivant. Il n'est pas
positionné à 1 pendant une action Hold ou FastStop; en revanche il est
positionné à 1 lorsque Halt a mis fin à un profil de mouvement. IN_POSITION est
positionné à 0 lors de la désactivation et à 1 lors de la réactivation.
AXIS_AT_TARGET est positionné à 1 après que l'axe soit arrivé à la fin d'un profil
de mouvement (bit d’état PROFILE_END) vers une position cible et que la
position de l'axe se trouve dans la fenêtre au point de la position cible. Il n'est pas
positionné à 1 si la position est extérieure à la fenêtre au point, ou au démarrage
du mouvement suivant. Il n'est pas positionné à 1 si une action Halt ou FastStop,
une désactivation du variateur ou un défaut interrompt un profil de mouvement
avant que l'axe ne s'arrête à la position cible, même si la position de l'axe se
trouve dans la fenêtre au point de la cible. La désactivation et la réactivation du
variateur ne modifie pas l'état du bit AXIS_AT_TARGET. Ce bit n'est pas
positionné à 1 si AXIS_POS_LIMIT ou AXIS_NEG_LIMIT sont définis.
AXIS_AT_TARGET est similaire au bit IN_POSITION, à la différence que :
z il n'est pas modifié lorsque le variateur est désactivé,
z il est positionné à 0 à la fin d'un arrêt et il n'est pas modifié après une
réactivation du variateur,
z il est positionné à 0 si l'axe se trouve sur une butée,
z il est vérifié après que le bit PROFILE_END soit positionné à 1 alors que
IN_POSITION est vérifié après que STOPPING soit positionné à 1.
Il se peut que le bit AXIS_AT_TARGET ne soit pas positionné à 1 suite à des
fonctions de mouvement normales tels que Halt. Attendez que PROFILE_END et
IN_POSITION soient positionnés à 1, et contrôlez ensuite AXIS_AT_TARGET avec
une instruction séparée.
218
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre Limite de position : InPositionBand
Description
Ce paramètre permet de définir la valeur de la position de la fenêtre au point de l’axe
spécifié.
Cette valeur est exprimée en UnitésPosition.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetInPositionBand qui envoie une requête de lecture de la valeur de position
courante,
SetInPositionBand qui envoie une requête d’écriture de la nouvelle valeur de
position.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
InPositionBand.
Objet
Nom
Code
Type
fonction d’instruction
%MFxy.i.41
IN_POSITION_BAND -
READ_PARAM
Description
Commande de lecture
WRITE_PARAM Commande d’écriture
%MWxy.i.26 ACTION_CMD
1035
WRITE_CMD
2035
35009561.01 07/2008
Commande de lecture
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2
-
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur.
Voir (Commande
WRITE_CMD : Erreurs
de programmation,
p. 325)
219
Réglage des modules TSX CSY 84 /164
A propos du mode d’activation
Mode
d’activation d’un
axe
Le mode d’activation d'un axe, spécifié par la fonction SetEnableMode, contrôle la
valeur de la commande de position qui est d'abord envoyée au variateur lorsque
celui-ci est en cours d'activation.
Les deux modes, qui effectuent la sélection entre CONSIGNE et MESURE, sont
décrits ci-dessous :
220
Valeur Mode
Description
0
MESURE
La position de recopie d'un axe est lu dans le variateur; celui-ci est
commandé par asservissement dans cette position pendant
l'activation. Ceci évite tout mouvement de l'axe pendant l’activation. Il
s'agit du mode d’activation par défaut qui est également fortement
recommandé.
1
CONSIGNE La dernière position de consigne pendant la désactivation d'un axe
est utilisée comme commande de position envoyée au variateur
pendant l'activation. Ce mode permet de poursuivre l'asservissement
de l'axe dans la même position lorsque l'axe est en permanence
activé et désactivé. Si l'axe est en mouvement pendant la
désactivation, il reviendra à la position de consigne précédente dès
que l'axe est activé. Le profil du mouvement de retour est contrôlé
uniquement par les paramètres de gain de l'asservissement du
variateur, ce qui peut provoquer un mouvement brutal. Ce mode doit
être utilisé uniquement lorsqu'il est possible de déterminer que tout
mouvement susceptible de se produire pendant la désactivation est
très faible. EnablePositionBand (tolérance) est utilisée pour contrôler
l'écart maximum autorisé à partir de la position désactivée
commandée. Si le mouvement de l'axe est inférieur à la tolérance
pendant la désactivation, la consigne désactivée est utilisée et l'axe
effectue le mouvement de retour. Si le mouvement de l'axe est
supérieur à la tolérance pendant la désactivation, la mesure de l'axe
est utilisée et l'axe ne se déplace pas pendant la désactivation. Par
exemple, un axe frein qui ne peut être déplacé que sous contrôle du
module de commande.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Tolérance en
mode
CONSIGNE
La fenêtre au point est une tolérance utilisée lorsque le mode d'activation
CONSIGNE est défini comme ModeActivation. Si le mode d'activation MESURE est
défini, la fenêtre au point n'a aucun effet.
Si l'axe est configuré en mode CONSIGNE et s'il se déplace d'une distance
inférieure à la fenêtre au point après la désactivation, le module de commande
d’axes :
1. Récupère la dernière position de consigne avant la désactivation de l'axe.
2. Commande à l'axe de se déplacer à cette position lors de la réactivation.
Si l'axe s'est déplacé d'une distance supérieure à la fenêtre au point, le module
réactive l'axe en passant provisoirement en mode MESURE. Le module :
1. Lit la position de l'axe.
2. Commande à l'axe de rester à cette position lors de la réactivation.
Cela empêche le déplacement de l'axe d'une distance supérieure à la fenêtre au
point lorsque l'axe est réactivé en mode CONSIGNE.
35009561.01 07/2008
221
Réglage des modules TSX CSY 84 /164
Paramètre Limite de position : EnableMode
Description
Ce paramètre permet de définir le mode d'activation d'un axe : MESURE ou
CONSIGNE.
Le mode MESURE est le mode d'activation par défaut qui est également fortement
recommandé.
AVERTISSEMENT
Vous ne devez définir le mode d'activation CONSIGNE qu'après avoir
lu la description du mode d'activation et avoir bien compris que si l'axe
effectue un déplacement inférieur à la tolérance EnablePositionBand
lorsqu'il est désactivé, il "reviendra" à la dernière position de consigne
avant la désactivation. Il est indispensable de prendre des mesures de
protection adéquates, telles que des freins sans libération manuelle,
ainsi que de faibles limites d'erreur de suivi activées, de façon à éviter
tout mouvement indésirable pendant l'activation.
Le non-respect de ces instructions peut provoquer la mort, des
blessures graves ou des dommages matériels.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetEnableMode qui envoie une requête de lecture du mode d’activation courant
de l’axe désigné,
SetEnableMode qui envoie une requête d’écriture du nouveau mode d’activation
de l’axe désigné.
Ces fonctions utilisent l’instruction WRITE_CMD.
222
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
EnableMode.
Objet
Nom
%MWxy.i.26 ACTION_CMD
Code
Description
fonction
1524
2524
35009561.01 07/2008
Commande de lecture
Commande d’écriture
%MDxy.i.20
RETURN_CMD_1 -
Résultat de la lecture.
%MDxy.i.27
PARAM_CMD_1
-
Valeur à écrire : Mode d’activation.
0 : Mesure
1 : Consigne
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir (Commande
WRITE_CMD : Erreurs de programmation,
p. 325)
223
Réglage des modules TSX CSY 84 /164
Comportement sur dévalidation d’un axe
Présentation
Le but de cette évolution est de pouvoir choisir le comportement d’arrêt des
variateurs sur ordre de verrouillage des axes réels :
z
z
soit par libération du couple de suite, c’est à dire en "roue libre" (cas des axes liés
mécaniquement),
soit par freinage selon la pente d’arrêt d’urgence (IDN3022).
Deux solutions sont alors possibles :
z
z
par configuration du variateur,
par configuration du module
Choix par
configuration du
variateur
Cette solution permet de retrouver cette possibilité sur tout les variateurs de la
gamme.
Choix par
configuration du
module
Suivant la valeur du bit 6 (_FREEWHEEL_STOP) du mot %MWxy.i.35
(FUNCTION_VALIDATION) dans les paramètres de l’axe réel, on obtient :
z
z
si le bit est égale à 0, le variateur s’arrêtera par freinage selon la pente d’arrêt
d’urgence avant de passer en roue libre, (si le variateur à été configuré au
préalablement avec Unilink, ACTFAULT=1),
si le bit est égale à 1, le variateur passera en roue libre de suite.
Note : ce choix ne sera pas accessible par les écrans de configuration ou de
paramétrage. Il faudra pour l’activer, utiliser un WRITE_PARAM puis un
SAVE_PARAM.
224
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
7.3
Paramètres d’un groupe d’axes suiveurs
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre présentes les paramètres de réglage d’un groupe d’axes
suiveurs..
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Description de l’écran de réglage d’un module SERCOS® : Axes suiveurs
35009561.01 07/2008
Page
226
A propos d'un groupe d'axes suiveurs
228
Donnée ModeSuiveur
231
Paramètre d’un groupe suiveur : FollowerMode
232
Paramètre d’un groupe suiveur : FollowerConfig
233
Paramètre d’un groupe suiveur : FollowerRatio
235
A propos de l'offset maître
238
Paramètre d’un groupe suiveur : MasterOffset
239
Paramètre d’un groupe suiveur : MasterTriggerPosition
241
Paramètre d’un groupe suiveur : FollowerBias
243
Paramètre d’un groupe suiveur : AbsFollowerBias
244
Propagation des arrêts dans un groupe suiveur
246
Fonction d’alignement des pentes d’arrêt d’urgence
247
225
Réglage des modules TSX CSY 84 /164
Description de l’écran de réglage d’un module SERCOS® : Axes suiveurs
Introduction
Cet écran permet de modifier directement en mode local ou connecté les
paramètres de configuration des axes suiveur.
Note : Il n’est pas possible de supprimer un maître ou un esclave.
Note : pour plus d’informations sur les parties communes des différents écrans
de réglage, voir Description des écrans de réglage d’un module SERCOS®
:Généralités, p. 187.
Illustration
La figure ci-dessous montre la zone de réglage d’une voie SERCOS® configurée en
axe réel ou imaginaire.
Maître
9
Esclave 1
10
Mesure
Description
226
Engrenage
Came
Consigne
Démarrage
No
25
Immediatly
Offset 1000000e.000
Bias
remains
Trigger 0000000e.000
Arrêt sur
suivi
stop
maître/déf.
Le tableau ci-dessous présente la zone de réglage d’une voie SERCOS®
configurée en axe suiveur.
Elément
Paramètre associé
Bit/Mot
langage associé
Description
Maître
MASTER_CHANNEL
%MWxy.i.35
Numéro de l’axe maître (1 à 16,
N n’est pas accessible)
Esclave
SLAVE_CHANNEL_Z
%MWxy.i.36
Numéro de l’axe esclave Z
Mesure/Consigne FOLL_TYPE_Z
%MWxy.i.37:X2
Type de suivi de l’esclave Z
Engrenage/Came FOLL_POSITION_Z)
%MWxy.i.37:X1
Mode ration ou came de
l’esclave Z)
N°
NUMERATOR_Z
%MFxy.i.38
Numérateur de l’esclave Z
Offset
DENOMINATOR_Z
%MFxy.i.40
Dénominateur de l’esclave Z
Démarrage
FOLL_START_Z
%MWxy.i.37:X8 à X10 Conditions de démarrage
Bias
FOLL_BIAS_REMAINS_Z %MWxy.i.37:X7
Valeur du bias
Trigger
TRIGGER_POSITIO_Z
%MFxy.i.42
Valeur du seuil de l’axe esclave
Z
Arrêt sur suivi
-
%MWxy.i.37:X3
Arrêt de l’axe suiveur Z si
suppression du lien.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
35009561.01 07/2008
Elément
Paramètre associé
Bit/Mot
langage associé
Description
Stop maître/def
-
%MWxy.i.37:X6
Arrêt du maître lors d’un défaut
d’écart de poursuite
227
Réglage des modules TSX CSY 84 /164
A propos d'un groupe d'axes suiveurs
Groupe Suiveur
Un GroupeSuiveur est un ensemble d'axes qui permet à un groupe d'axes de suivre
le mouvement d'un axe maître. Il existe deux méthodes principales de suivi d'un axe
maître :
z
z
Ratio : Les axes suiveurs suivent l'axe maître au moyen d'un ratio appelé Ratio.
Came : Le mouvement des axes suiveurs par rapport au maître figure dans un
Profil de came.
Il est nécessaire de déclarer l'axe maître au GroupeSuiveur, mais cet axe maître
n'est pas installé dans le GroupeSuiveur. Il existe un seul axe maître qui dirige tous
les suiveurs. Le type de l'axe maître peut être n'importe quel type d'axe
indépendant. Vous pouvez changer l'axe dont vous voulez disposer comme axe
maître.
Tous les axes suiveurs de l'axe maître doivent être installés dans le GroupeSuiveur.
Il est possible d'installer six axes dans un GroupeSuiveur. Chaque axe suiveur peut
suivre l'axe maître en fonction d'un Ratio ou d'un Profil de came. Plusieurs axes
suiveurs peuvent partager un Profil de came.
Utilisation d'un
Groupe Suiveur
Pour utiliser un GroupeSuiveur, vous effectuerez généralement les opérations
suivantes :
z
z
z
z
Configuration de tous les axes isolés qui appartiendront à ce GroupeSuiveur.
Configuration du GroupeSuiveur.
Activation des variateurs du GroupeSuiveur par l'exécution de la fonction
EnableDrive sur le GroupeSuiveur.
Activation du suivi des axes suiveurs à l'aide des bits Acquire et FollowOn, ou
désactivation des axes suiveurs par l'exécution des bits FollowOff et Release.
Vous pouvez commander le déplacement des axes suiveurs lorsque le suivi est
activé ou désactivé. Toute commande de mouvement exécutée sur un axe suiveur
lorsque le suivi est activé entraînera un mouvement supplémentaire, en plus du
mouvement résultant du suivi du maître.
Position de seuil
228
En option, vous pouvez définir une position du seuil du maître. La fonction
SetMasterTriggerPosition définit la position du maître qui déclenchera le suivi pour
l'axe spécifié. Le mode de suivi (ModeSuiveur) indique si la position du seuil du
maître sera utilisée. Lorsque vous utilisez cette fonctionnalité avec le suivi activé,
celui-ci commencera réellement lorsque le maître atteint la position de seuil du
maître.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Valeur de Bias
Lorsque le suivi a lieu, la valeur de Bias indique la distance entre la position du
suiveur et la position où il est censé être, en fonction du Profil de came ou du Ratio
Suiveur. Vérifiez que le suivi se produit avant d'appeler la fonction GetFollowerBias.
(Ne comptez pas sur le fait que le suivi a été activé.) Pour un axe suiveur, le bit d'état
du mouvement AXIS_IS_LINKED sera positionné lorsque le suivi a réellement lieu.
Si vous appelez la fonction GetFollowerBias lorsque le suivi n'a pas lieu, la valeur
renvoyée indiquera la position commandée de l'axe suiveur.
Utilisez le Bias lorsque vous voulez que l'axe suiveur soit à un point connu lorsque
l'axe maître est à un point donné. Cette fonctionnalité n'est pas utile dans les
applications qui ordonnent au suiveur de simplement suivre la vitesse du maître
avec un certain ratio. Elle n'est pas non plus utile lorsque le suiveur doit se déplacer
d'une distance incrémentale connue (par exemple, un mouvement "d'inscription").
En mode Ratio, la valeur de Bias change lorsque l'axe suiveur accélère jusqu'à
atteindre la vitesse de suivi après l'activation du suivi ou après la modification du
Ratio.
La valeur de Bias est mémorisée lorsque le suivi commence. En mode Came, la
position où le suiveur est censé se trouver est déterminée par la position actuelle du
maître et par l'entrée correspondante dans le Profil de came. En mode Ratio, la
formule suivante indique où le suiveur est censé se trouver :
position où l'axe suiveur est censé se trouver = position actuelle du maître * Ratio
Lorsque le suivi commence, le contrôleur de mouvement définit la valeur de Bias
pour la distance entre la position actuelle de l'axe suiveur et l'endroit où il est censé
se trouver. Ce Bias empêche le suiveur de sauter à l'endroit où il est censé se
trouver lorsque le suivi commence. Le mouvement de suivi de l'axe suiveur sera
alors décalé à partir de l'endroit où il est censé se trouver, à moins que le Bias soit
nul. Pour remettre à zéro le Bias, un mouvement incrémental doit être envoyé à l'axe
suiveur avec le mouvement égal à l'opposé de la valeur renvoyée par la fonction
GetFollowerBias.
Bias différent de
zéro
Il se peut que vous vouliez avoir un Bias différent de zéro. En mode Came, il est
possible de décaler le mouvement à partir des valeurs figurant dans le tableau. En
mode Ratio, il est possible d'avoir un décalage de la relation linéaire de façon que
le tracé des positions du maître par rapport aux positions du suiveur ne passe pas
par le point :
position du suiveur = 0 si position du maître = 0
C.à.d., en mode Ratio, que vous pouvez contrôler l'endroit où doit se trouver le
suiveur pour toute position particulière du maître. Vous modifiez le Bias d'un axe
suiveur en envoyant des commandes de mouvement à cet axe suiveur.
Il est possible de changer le mode de suivi ModeSuiveur à tout moment pour
n'importe quel axe. Vous pouvez ainsi passer du type Came au type Ratio, et
réciproquement, ainsi que modifier les Profils de came ou les Ratio Suiveurs.
35009561.01 07/2008
229
Réglage des modules TSX CSY 84 /164
Offset Maître
Certaines applications sont simplifiées par l'utilisation de la fonctionnalité
OffsetMaître. Examinons le cas où un suiveur est censé suivre un profil sinusoïdal,
alors qu'un autre suiveur est censé suivre un profil cosinusoïdal. Dans ce cas, il est
possible de partager entre les deux axes un seul Profil de came contenant des
données sinusoïdales, avec des valeurs OffsetMaître de 0 et 90 degrés pour les
suiveurs sinusoïdal et cosinusoïdal respectivement.
Bits d'état
Les bits d'état du mouvement d'un axe suiveur indiquent l'état d'une commande de
mouvement envoyée à cet axe. Par exemple, le bit PROFILE_END qui est
positionné n'indique pas que l'axe suiveur est immobile. L'axe suiveur se déplacera
si l'axe maître se déplace. Lorsqu'une commande de mouvement est envoyée à
l'axe suiveur, le bit PROFILE_END s'efface jusqu'à la fin de ce mouvement de l'axe
suiveur. Les autres bits d'état ont un comportement similaire qui reflète l'état de la
commande envoyée à l'axe suiveur, et non l'état de l'axe maître.
230
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Donnée ModeSuiveur
Description
Dans un GroupeSuiveur, il existe deux méthodes de suivi d'un axe maître :
z Ratio : Les axes suiveurs suivent l'axe maître au moyen d'un ratio.
z Came : Le mouvement des axes suiveurs par rapport au maître est défini par un
ProfilCame.
Lorsque tous les axes sont définis dans un GroupeSuiveur, le suivi des axes du
groupe est configuré en spécifiant le type de ModeSuiveur pour chaque axe. Le
tableau suivant détaille les états ModeSuiveur. Le bit 0 est le bit de poids faible
(LSB).
Donnée
ModeSuiveur
Le tableau suivant donne les différentes valeurs de la donnée :
Nom
Bit
Description
FOLL_WHERE
0
Valeur = 0 : Obligatoire
FOLL_TYPE
1
Détermine le type de suivi :
0 = Ratio
1 = Came
FOLL_POSITION
2
Détermine la position à suivre :
0 = mesure
1 = consigne
FOLL_FOLLOW_ON_HALT 3
35009561.01 07/2008
Détermine l'action à effectuer lorsque le suivi est activé :
0 = n'arrêter aucun profil de mouvement en cours sur l'axe suiveur
1 = arrêter tout profil de mouvement en cours sur l'axe suiveur
Réservé
4, 5
FOLL_HALT_MASTER
6
Détermine si le maître doit être arrêté en cas de défauts suiveurs
lorsque le suivi est actif :
0 = laisser le mouvement du maître se poursuivre
1 = arrêter le maître
FOLL_BIAS_REMAINS
7
Détermine l'action à effectuer lorsque le suivi est désactivé :
0 = arrêter tout profil de mouvement supplémentaire sur l'axe suiveur
1 = n'arrêter aucun profil de mouvement supplémentaire sur l'axe
suiveur
FOLL_START
8...
10
Détermine le démarrage :
0 = immédiat
1 = démarrer lorsque la position du maître rencontre la position du
seuil du maître dans le sens positif
2 = démarrer lorsque la position du maître rencontre la position du
seuil du maître dans le sens négatif
3 = démarrer lorsque la position du maître est supérieure ou égale à
la position du seuil du maître
4 = démarrer lorsque la position du maître est inférieure ou égale à la
position du seuil du maître
231
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : FollowerMode
Description
Ce paramètre contient le mode de suivi en cours pour l’axe esclave spécifié.
Fonctions
associées
La fonction associée à ce paramètre est :
z
GetFollowerMode qui envoie une requête de lecture du mode de suivi courant,
Cete fonction utilise l’instruction WRITE_CMD.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
FollowerMode.
Objet
Nom
%MWxy.i.26 ACTION_CMD
%MDxy.i.20
Code
Type
fonction d’instruction
Description
1529
WRITE_CMD
Commande de lecture
-
Résultat de la lecture.
RETURN_CMD_1 -
%MDx’y’.i.27 PARAM_CMD_1
-
-
Valeur à écrire :
Identificateur (1) de l’axe
suiveur dans le groupe
suiveur.
%MWxy.i.19
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
ERROR_CMD
Légende
232
xy
Adresse du groupe suiveur (voie comprise entre 21 et 24)
x’y’
Adresse de l’axe suiveur (voie comprise entre 1 et 12)
(1)
Cet identificateur est contenu dans le mot constant %KWxy.i.0
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : FollowerConfig
Description
Ce paramètre permet de définir le mode se suivi (ModeSuiveur) et le profil de
mouvement correspondant (Ratio ou Came) pour l'axe spécifié.
Note : un Profil de came doit être configuré avant d'y faire référence.
Note : Il est possible de modifier ce paramètre lorsque le suivi est activé.
Cependant, lorsque le suivi est activé avec le mode Came, ou que ce mode passe
à Came, la vitesse du suiveur peut changer rapidement si le nouveau profil de
mouvement est radicalement différent de l'ancien.
Fonctions
associées
La fonction associée à ce paramètre est :
z
SetFollowerConfig qui envoie une requête d’écriture des nouveaux modes de
suivi et profil de mouvement,
Cette fonction utilise l’instruction WRITE_CMD.
35009561.01 07/2008
233
Réglage des modules TSX CSY 84 /164
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
FollowerConfig.
Objet
Nom
%MWxy.i.26 ACTION_CMD
Code
Type
Description
fonction d’instruction
420
WRITE_CMD Commande d’écriture
%MDx’y’.i.27 PARAM_CMD_1 -
-
Valeur à écrire : Identificateur
(1) de l’axe suiveur dans le
groupe suiveur.
%MDxy.i.29
PARAM_CMD_2 -
-
Valeur à écrire : Mode suiveur.
Voir Donnée ModeSuiveur,
p. 231
%MFxy.i.31
PARAM_CMD_3 -
-
Valeur à écrire :
Numéraeur dans le cas du
mode ratio,
Profil de mouvement dans le
cas du mode came.
%MFxy.i.33
PARAM_CMD_4 -
-
Valeur à écrire : Dénominateur
dans le cas d’un ratio
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
-
Légende
234
xy
Adresse du groupe suiveur (voie comprise entre 21 et 24)
x’y’
Adresse de l’axe suiveur (voie comprise entre 1 et 12)
(1)
Cet identificateur est contenu dans le mot constant %KWxy.i.0
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : FollowerRatio
Description
Ce paramètre permet de modifier le Ratio de l'axe suiveur spécifié.
Le numérateur du ratio indique de combien le suiveur se déplacera lorsque l'axe
maître se déplace de la distance figurant au dénominateur. Il est possible de
modifier à tout moment la valeur du Ratio.
Le Ratio NE CHANGE PAS instantanément, de façon à obtenir un mouvement
régulier lorsque le suivi est activé et que le mouvement de suivi a lieu.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetFollowerRatio qui envoie une requête de lecture de la tôlérance de position
courante de l’axe désigné,
SetFollowerRatio qui envoie une requête d’écriture de la nouvelle tôlérance de
position de l’axe désigné.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
35009561.01 07/2008
235
Réglage des modules TSX CSY 84 /164
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
FollowerRatio.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.38
NUMERATOR_1
-
Commande de lecture esclave 1
%MFxy.i.40
DENOMINATOR_1 -
READ_PARAM
WRITE_PARAM Commande d’écriture esclave 1
READ_PARAM
Commande de lecture esclave 1
WRITE_PARAM Commande d’écriture esclave 1
%MFxy.i.46
NUMERATOR_2
-
%MFxy.i.48
DENOMINATOR_2 -
READ_PARAM
Commande de lecture esclave 2
WRITE_PARAM Commande d’écriture esclave 2
READ_PARAM
Commande de lecture esclave 2
WRITE_PARAM Commande d’écriture esclave 2
%MFxy.i.54
NUMERATOR_3
-
%MFxy.i.56
DENOMINATOR_3 -
READ_PARAM
Commande de lecture esclave 3
WRITE_PARAM Commande d’écriture esclave 3
READ_PARAM
RCommande de lecture esclave 3
WRITE_PARAM Commande d’écriture esclave 3
%MFxy.i.62
NUMERATOR_4
-
%MFxy.i.64
DENOMINATOR_4 -
READ_PARAM
Commande de lecture esclave 4
WRITE_PARAM Commande d’écriture esclave 4
READ_PARAM
Commande de lecture esclave 4
WRITE_PARAM Commande d’écriture esclave 4
%MFxy.i.70
NUMERATOR_5
-
%MFxy.i.72
DENOMINATOR_5 -
READ_PARAM
Commande de lecture esclave 5
WRITE_PARAM Commande d’écriture esclave 5
READ_PARAM
Commande de lecture esclave 5
WRITE_PARAM Commande d’écriture esclave 5
%MFxy.i.78
NUMERATOR_6
-
%MFxy.i.80
DENOMINATOR_6 -
READ_PARAM
Commande de lecture esclave 6
WRITE_PARAM Commande d’écriture esclave 6
READ_PARAM
Commande de lecture esclave 6
WRITE_PARAM Commande d’écriture esclave 6
%MWxy.i.26 ACTION_CMD
1114
WRITE_CMD
Commande de lecture
2114
236
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2
-
-
Résultat de la lecture de la variable
Numérateur.
%MFxy.i.24
RETURN_CMD_3
-
-
Résultat de la lecture de la variable
Dénominateur.
%MDxy.i.27
PARAM_CMD_1
-
-
Valeur à écrire : Identificateur de l’axe
dont le ratio est renvoyé.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : numérateur du ratio.
%MFxy.i.33
PARAM_CMD_4
-
-
Valeur à écrire : dénominateur du
ratio.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
35009561.01 07/2008
Objet
Nom
Code
Type
fonction d’instruction
Description
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD : Erreurs
de programmation, p. 325)
-
237
Réglage des modules TSX CSY 84 /164
A propos de l'offset maître
Valeur de l'offset
maître
Un Axe suiveur suit la somme de la position du maître et de la valeur OffsetMaître.
Fonctionnalités
de l'offset maître
Les fonctionnalités facultatives de l'OffsetMaître : GetMasterOffset et SetMasterOffset peuvent simplifier certaines applications. Examinons le cas où un axe
suiveur est censé suivre un profil sinusoïdal, alors qu'un autre axe suiveur est censé
suivre un profil cosinusoïdal. Dans ce cas, il est possible de partager entre les deux
axes un seul Profil de came contenant des données sinusoïdales, avec des valeurs
OffsetMaître respectivement de 0 et 90 degrés pour les suiveurs sinusoïdal et
cosinusoïdal.
238
Généralement, la valeur OffsetMaître est modifiée lorsque le suivi est désactivé. Il
est possible de la changer lorsque le suivi est activé, mais en faisant attention
d'éviter tout mouvement indésirable. L'OffsetMaître s'applique immédiatement sans
à-coups. Une modification importante lorsque le suivi est activé peut provoquer un
mouvement rapide du suiveur vers la nouvelle position.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : MasterOffset
Description
Ce paramètre permet de définir la valeur de l'offset maître pour l'axe suiveur
spécifié.
Chaque axe suiveur peut avoir un offset unique appliqué à la position du maître.
Cette caractéristique est utile lorsque vous voulez utiliser un même Profil de came
pour plusieurs axes suiveurs, mais que la forme de came de chaque suiveur est
décalée d'une certaine rotation par rapport à la came d'un autre suiveur.
Note : Il est possible de changer l'OffsetMaître lorsque le suivi est activé, mais en
faisant attention d'éviter tout mouvement indésirable. Des modifications
importantes doivent être intégrées sous forme d'une série de petits incréments de
façon à éviter des changements rapides et instantanés de la position du suiveur.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetMasterOffset qui envoie une requête de lecture de la valeur courante de
l’offset maître de l’axe désigné,
SetMasterOffset qui envoie une requête d’écriture de la nouvelle valeur de l’offset
maître de l’axe désigné.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
35009561.01 07/2008
239
Réglage des modules TSX CSY 84 /164
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
MasterOffset.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.40
DENOMINATOR_1
-
READ_PARAM
Commande de lecture esclave 1
%MFxy.i.48
DENOMINATOR_2
-
READ_PARAM
WRITE_PARAM Commande d’écriture esclave 1
Commande de lecture esclave 2
WRITE_PARAM Commande d’écriture esclave 2
%MFxy.i.56
DENOMINATOR_3
-
READ_PARAM
%MFxy.i.64
DENOMINATOR_4
-
READ_PARAM
Commande de lecture esclave 3
WRITE_PARAM Commande d’écriture esclave 3
Commande de lecture esclave 4
WRITE_PARAM Commande d’écriture esclave 4
%MFxy.i.72
DENOMINATOR_5
-
READ_PARAM
%MFxy.i.80
DENOMINATOR_6
-
READ_PARAM
Commande de lecture esclave 5
WRITE_PARAM Commande d’écriture esclave 5
Commande de lecture esclave 6
WRITE_PARAM Commande d’écriture esclave 6
%MWxy.i.26 ACTION_CMD
1532
WRITE_CMD
2532
%MFxy.i.22
RETURN_CMD_2
Commande de lecture
Commande d’écriture
-
-
Résultat de la lecture : variable
Position.
%MDx’y’.i.27 PARAM_CMD_1
-
-
Valeur à écrire : Identificateur (1) de
l’axe suiveur dans le groupe suiveur.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : Position.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD : Erreurs
de programmation, p. 325)
Légende
xy
240
Adresse du groupe suiveur (voie comprise entre 21 et 24)
x’y’
Adresse de l’axe suiveur (voie comprise entre 1 et 12)
(1)
Cet identificateur est contenu dans le mot constant %KWxy.i.0
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : MasterTriggerPosition
Description
Ce paramètre permet de définir la position du maître qui déclenchera le suivi pour
l'axe spécifié.
Cette valeur est utilisée uniquement si le mode suiveur, indique que la condition de
démarrage du suivi doit avoir recours à une position de seuil du maître.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetMasterTriggerPosition qui envoie une requête de lecture de la valeur
courante de la position du maître,
SetTriggerPosition qui envoie une requête d’écriture de la nouvelle valeur de la
position du maître.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
35009561.01 07/2008
241
Réglage des modules TSX CSY 84 /164
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
MasterTriggerPosition.
Objet
Nom
Code
Type
fonction d’instruction
Description
%MFxy.i.42
TRIGGER_POSITION_1
-
Commande de lecture esclave 1
%MFxy.i.50
TRIGGER_POSITION_2
-
READ_PARAM
WRITE_PARAM Commande d’écriture esclave 1
READ_PARAM
Commande de lecture esclave 2
WRITE_PARAM Commande d’écriture esclave 2
%MFxy.i.58
TRIGGER_POSITION_3
-
%MFxy.i.66
TRIGGER_POSITION_4
-
READ_PARAM
Commande de lecture esclave 3
WRITE_PARAM Commande d’écriture esclave 3
READ_PARAM
Commande de lecture esclave 4
WRITE_PARAM Commande d’écriture esclave 4
%MFxy.i.74
TRIGGER_POSITION_5
-
%MFxy.i.82
TRIGGER_POSITION_6
-
READ_PARAM
Commande de lecture esclave 5
WRITE_PARAM Commande d’écriture esclave 5
READ_PARAM
Commande de lecture esclave 6
WRITE_PARAM Commande d’écriture esclave 6
%MWxy.i.26 ACTION_CMD
1531
WRITE_CMD
2531
%MFxy.i.22
RETURN_CMD_2
Commande de lecture
Commande d’écriture
-
-
Résultat de la lecture : variable
Position.
%MDx’y’.i.27 PARAM_CMD_1
-
-
Valeur à écrire : Identificateur
(1) de l’axe suiveur dans le
groupe suiveur.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : Position.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
Légende
242
xy
Adresse du groupe suiveur (voie comprise entre 21 et 24)
x’y’
Adresse de l’axe suiveur (voie comprise entre 1 et 12)
(1)
Cet identificateur est contenu dans le mot constant %KWxy.i.0
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : FollowerBias
Description
Ce paramètre contient la valeur du Bias.
Lorsque les modulos sont activés, le Bias est renvoyé avec modulo.
Fonctions
associées
La fonction associée à ce paramètre est :
z
GetFollowerMode qui envoie une requête de lecture du mode de suivi courant,
Cette fonction utilise l’instruction WRITE_CMD.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
FollowerBias.
Objet
Nom
%MWxy.i.26 ACTION_CMD
%MFxy.i.22
Code
Type
Description
fonction d’instruction
1527
RETURN_CMD_2 -
WRITE_CMD Commande de lecture
-
Résultat de la lecture.
%MDx’y’.i.27 PARAM_CMD_1
-
-
Valeur à écrire : Identificateur
(1) de l’axe suiveur dans le
groupe suiveur.
%MWxy.i.19
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
ERROR_CMD
Légende
35009561.01 07/2008
xy
Adresse du groupe suiveur (voie comprise entre 21 et 24)
x’y’
Adresse de l’axe suiveur (voie comprise entre 1 et 12)
(1)
Cet identificateur est contenu dans le mot constant %KWxy.i.0
243
Réglage des modules TSX CSY 84 /164
Paramètre d’un groupe suiveur : AbsFollowerBias
Description
Ce paramètre permet d’arrêter le suivi et de déplacer un axe suiveur vers une
position absolue sans arrêter le suiveur.
Bias Absolu
Le Bias Absolu est la différence entre le Bias, renvoyé par la fonction
GetFollowerBias, et la position supplémentaire commandée à un axe suiveur. Il est
possible d'utiliser le Bias Absolu conjointement à une commande de mouvement
absolu (Move_Abs) pour amener l'axe suiveur à une position calculable.
Position
commandée à un
axe suiveur
La position commandée à un axe suiveur est la somme de la commande de position
provenant du suivi du maître et du Bias :
Commande_pos = MéthodeSuiveur (pos_maître + offset_maître) + Bias;
Dans cette expression, MéthodeSuiveur s'applique ainsi :
Ratio : multiplication de l'argument du maître par le Ratio
z Came : index dans le Profil de Came fourni par l'argument maître.
z
Bias
Le Bias se compose également de deux parties :
Bias = commande_pos_additive + bias_absolu;
où :
commande_pos_additive est la commande de position générée par toute
commande de mouvement dirigée à l'axe suiveur lui-même.
z bias_absolu est une valeur mémorisée à chaque changement de Mode Suiveur
(activation suiveur, changement de Profil de Came ou de Ratio Suiveur). La
valeur mémorisée est calculée de façon à éviter tout saut dans la commande de
position lors de l'utilisation du nouveau mode. Cette valeur mémorisée se nomme
le Bias Absolu.
z
Fonctions
associées
La fonction associée à ce paramètre est :
z
GetFollowerMode qui envoie une requête de lecture du mode de suivi courant,
Cette fonction utilise l’instruction WRITE_CMD.
244
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
AbsFollowerBias.
Objet
Nom
%MWxy.i.26 ACTION_CMD
%MFxy.i.22
Code
Type
Description
fonction d’instruction
1526
RETURN_CMD_2 -
WRITE_CMD Commande de lecture
-
Résultat de la lecture.
%MDx’y’.i.27 PARAM_CMD_1
-
-
Valeur à écrire : Identificateur
(1) de l’axe suiveur dans le
groupe suiveur.
%MWxy.i.19
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
ERROR_CMD
Légende
35009561.01 07/2008
xy
Adresse du groupe suiveur (voie comprise entre 21 et 24)
x’y’
Adresse de l’axe suiveur (voie comprise entre 1 et 12)
(1)
Cet identificateur est contenu dans le mot constant %KWxy.i.0
245
Réglage des modules TSX CSY 84 /164
Propagation des arrêts dans un groupe suiveur
Arrêt du maître
Choix du type d’arrêt du maître en cas de défaut sur les esclaves :
Liste des choix :
z
z
z
pas d’arrêt du maître (valeur par défaut),
arrêt normal du maître selon la pente du STOP paramétrée,
arrêt du maître par ordre de verouillage
Note : ce choix ne sera pas accessible par les écrans de configuration ou de
paramétrage. Il faudra pur l’activer utiliser soit par un WRITE_PARAM soit par un
MODE_PARAM.
Description :
Bit de gestion : %MWxy.i.37:X11 (FOLL_FAULT_MASTER_x).
z
z
z
Arrêt d’un
esclave
la valeur 1 sur le bit 11avec le bit 6 à 0 ne déclenchera aucun arrêt du maître,
la valeur 1 sur le bit 11 (FOLL_FAULT_MASTER) et le bit 6
(FOLL_HALT_MASTER) du mot FOLLOWER_MODE dans les paramètres du
groupe suiveur fera que le maître s’arrêtera selon la pente d’arrêt d’urgence en
cas de défaut sur l’esclave,
la valeur 0 sur le bit 11 avec le bit 6 à 1 déclenchera un arrêt norrmal du maître
(équivalent à un STOP).
Choix d’un arrêt d’un esclave en cas de défaut sur le maître :
z
z
arrêt sur suivi du maître (valeur par défaut),
arrêt de l’esclave par ordre de verrouillage.
Description :
Bit de gestion : %MWxy.i.37:X12 (FOLL_FAULT_SLAVE_x).
la valeur 1 sur le bit 12 (FOLL_FAULT_SLAVE) du mot FOLLOWER_MODE dans
les paramètres du groupe suiveur fera que l’esclave s’arrêtera selon la pente d’arrêt
d’urgence en cas de défaut sur le maître.
( Rampe de décélération DECSTOP sur Lexium configurable par Unilink, par IDN P
3022 ou par code ascii).
Note : l’action des ces bits n’est validé qu’aprés une écriture dans les mots
constants %Kx de la configuration du groupe. Pour cela effectuer un MOD-PARAM
sur le groupe.
246
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Fonction d’alignement des pentes d’arrêt d’urgence
Présentation
Cette fonction gère le calcul et la modification des IDN3022 (ou du paramètre
DECSTOP sous Unilink) dans les variateurs Lexium.
Elle permet de configurer les pentes d'arrêt d'urgence des variateurs esclaves d'un
groupe suiveur de façon à arrêter tous les axes au même moment en cas de défaut.
Pour cela on crée un nouvel OPCODE ( 570) utilisable sur les groupes suiveur.
Cette commande aura pour effet de calculer les pentes de décélération du maître
et des esclaves en fonction de la pente passée en paramètre puis de les envoyer
à tous les variateurs des axes réels du groupe (y compris le maître).
Le paramètre de cette fonction est une pente de décélération exprimée dans
l'unité choisie en configuration pour le maître du groupe. Si le maître est une
consigne externe nous retiendrons comme unité l'unité de position/. S2
Objet
35009561.01 07/2008
Type
Symbol
Explication
Commentaire
%MW xy.i.19
Mot
ERROR_CMD
Code d’Erreur
%MD xy.i.20
Double mot
RETURN_CMD_1
non utilisé
%MF xy.i.22
Flottant
RETURN_CMD_2
non utilisé
%MF xy.i.24
Flottant
RETURN_CMD_3
non utilisé
%MW xy.i.26
Mot
ACTION_CMD
570
ADJUST_3022
%MD xy.i.27
Double mot
PARAM_CMD_1
0
non utilisé
non utilisé
%MD xy.i.29
Double mot
PARAM_CMD_2
0
%MF xy.i.31
Flottant
PARAM_CMD_3
Décélération
%MF xy.i.33
Flottant
PARAM_CMD_4
0
non utilisé
247
Réglage des modules TSX CSY 84 /164
Exemple
IF NOT %MW104.21.0:X1 THEN (* pas de WRITE_CMD en cours
*)
%MW104.21.26:=570;
(* Action 570 = ADJUST_3022 *)
%MF104.21.31:=1000.0;
Tour/mn/s*)
(* Décélération du maître = 1000
WRITE_CMD %CH 104.21;
END_IF;
Cas de refus de la commande :
z
z
z
groupe suiveur ayant des esclaves en profils de came => code d’erreur 62,
la décélération pour un esclave ou pour le maître est supérieure à la décélération
maximum donnée en configuration => code d’erreur 63. A noter : ce code
d’erreur apparaît aussi si une pente nulle est demandée,
l’IDN "DECSTOP" calculé pour un axe est refusé par le variateur (paramètre hors
borne) => code d’erreur 1002.
Note : cette fonctionnalité ne fonctionnera que si les variateurs sont des Lexium ≥
5.50. Elle ne sera accessible que pour les groupes dont tous les esclaves sont
configurés en ratio. Le réglage des pentes n’est pas sauvegardé, il peut être perdu
en cas de mise hors tension ou Reset du variateur.
248
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
7.4
Réglage d’un profil de came
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre décrit les fonctions de réglage d’un profil de came.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
A propos d'un profil de came
250
Paramètre d’un profil de came : Length
251
Paramètre d’un profil de came : La fonction LookUpFollowerPosition
252
Paramètre d’un profil de came : Coord
253
Paramètre d’un profil de came : InterpType
255
Paramètre d’un profil de came : ProfileId
256
Description de l’écran TRF_RECIPE pour les profils de came
257
Instruction TRF_RECIPE
259
249
Réglage des modules TSX CSY 84 /164
A propos d'un profil de came
Introduction
Un profil de came se rapporte à la position d'un axe suiveur pour une position
donnée d'un axe maître. Le profil de came représente un tableau des coordonnées
de position du maître et du suiveur. Les points qui ne figurent pas explicitement dans
le tableau se déduisent par interpolation entre les points donnés. Le type
d'interpolation peut être linéaire ou cubique.
Positions du
maître et
incréments
Les positions du maître doivent figurer dans le tableau en ordre croissant du premier
au dernier élément du profil. Par exemple, les positions du maître ne peuvent
progresser de 360 à 0 degrés du fait qu'elles ne sont pas croissantes.
Les incréments entre les positions du maître peuvent être variables. Un incrément
fixe n'est pas indispensable. Par exemple, les valeurs suivantes des positions du
maître sont acceptables : 0, 1, 2, 100, 300, 360. Toutes les unités de position sont
utilisables.
Applications
types
Les applications nécessitant un mouvement continu, du fait que le mouvement a lieu
d'une itération d'un profil de came à la suivante. Pour que ce passage s'effectue
aussi régulièrement que possible, la valeur de la position du suiveur du premier
point doit être identique à celle du suiveur de position du dernier point. Par exemple,
si les valeurs des positions du maître s'expriment en degrés et les positions du
suiveur en pouces, et si la première position du maître se trouve à 0 degrés, et à 0
pouce pour le suiveur, la dernière position correspondante doit être celle du maître
à 360 degrés avec le suiveur à 0 pouces.
Etablir un profil
de came
Chaque point d'un tableau de profil de came a une position définie par des
coordonnées sur les deux axes du profil. Ceci signifie qu'un profil de came comporte
deux valeurs par point : une pour la position du maître et une pour la position du
suiveur. La fonction SetCoord modifie les deux valeurs d'un point existant d'un profil
de came. La fonction GetCoord renvoie les deux valeurs d'un point désigné dans un
profil de came.
Modifier le type
d'interpolation
Dans le tableau des points d'un profil, les positions qui ne figurent pas dans le
tableau se dérivent par interpolation entre les points donnés. Les interpolations
linéaire et cubique sont possibles. La modification du type d'interpolation s'effectue
au moyen des fonctions GetInterpType et SetInterpType.
250
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un profil de came : Length
Description
Ce paramètre contient le nombre de points spécifiés pour un profil.
Le nombre de points est fonction de la configuration du profil.
Le tableau ci-dessous présente les diiférents cas de configuration.
Fonctions
associées
Configuration ...
Alors...
à partir d'un fichier
le nombre de points est automatiquement déterminé
à partir de registres de
maintien
un de ces registres permet d'identifier la longueur
sans données et doit être
défini au moyen de la fonction
SetCoord
l'appel à cette fonction contient le nombre de points
La fonction associée à ce paramètre est :
z
GetLength qui envoie une requête de lecture du nombre de points du profil,
Cette fonction utilise l’instructios WRITE_CMD.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
Length.
Objet
Nom
%MWxy.i.26 ACTION_CMD
35009561.01 07/2008
Code
Type
fonction d’instruction
Description
534
WRITE_CMD
Commande de lecture
%MDxy.i.20
RETURN_CMD_2 -
-
Résultat de la lecture.
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
-
251
Réglage des modules TSX CSY 84 /164
Paramètre d’un profil de came : La fonction LookUpFollowerPosition
Description
Cette fonction contient la position de l’esclave suiveur du profil, pour une position du
maître spécifiée.
La position du suiveur se détermine par le type d'interpolation configuré pour ce
profil.
Fonctions
associées
La fonction associée est :
z
GetLookUpFollowerPosition qui envoie une requête de lecture de la position de
l’esclave suiveur du profil,
Cette fonction utilise l’instruction WRITE_CMD.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
Length.
Objet
Nom
%MWxy.i.26 ACTION_CMD
252
Code
Type
fonction d’instruction
Description
537
WRITE_CMD
Commande de lecture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture :
Position de l’esclave.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : Position du
maître.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un profil de came : Coord
Description
Cette fonction permet de modifier les coordonnées d'un point existant d'un profil de
came.
L'index de numérotation des points commence à zéro. Par conséquent, pour
modifier la première entrée d'un profil de came, utilisez la valeur 0.
Les profils de cames sont spécifiés par un tableau de coordonnées de positions.
Ces coordonnées sont accessibles au moyen de la structure de données CoordPos.
Chaque point a une valeur de position définie par des coordonnées sur les deux
axes du profil. Ceci signifie qu'un profil de came comporte deux valeurs par point :
une pour la position du maître et une pour la position du suiveur.
Les positions du maître doivent figurer dans le tableau en ordre croissant du premier
au dernier élément du profil de came. Par exemple, les positions du maître ne
peuvent progresser de 360 à 0 degrés du fait qu'elles ne sont pas croissantes.
Les incréments entre les valeurs des positions du maître peuvent être variables. Un
incrément fixe n'est pas indispensable. Par exemple, les valeurs suivantes des
positions du maître sont acceptables : 0, 1, 2, 100, 300, 360. Toutes les unités de
position sont utilisables.
ATTENTION
Ne modifiez pas un profil, n'appelez pas les fonctions Configure,
SetCoord(), ou SetInterpType lorsque le suivi fonctionne avec un
Groupe Suiveurs qui utilise le profil de came.
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
Note : dans certains cas particuliers, il est possible d'appeler la fonction SetCoord
pour modifier le profil lorsque le suivi est en fonctionnement. Cependant, vous ne
devez modifier que les points du profil qui se trouvent séparés par deux entrées
des points de profil les plus proches utilisés par l'axe suiveur. Le non respect de
cette restriction provoquera un mouvement indésirable du suiveur.
35009561.01 07/2008
253
Réglage des modules TSX CSY 84 /164
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetCoord qui envoie une requête de lecture des coordonnées courantes d'un
point existant d'un profil de came,
SetCoord qui envoie une requête d’écriture des nouvelles coordonnées d'un
point existant d'un profil de came.
Ces fonctions utilisent l’instruction WRITE_CMD.
Objets langage
Le tableau ci-dessous présente les différentes fonctions.
Objet
Nom
%MWxy.i.26 ACTION_CMD
254
Code
Type
Description
fonction d’instruction
532
WRITE_CMD Commande de lecture
533
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture :
Position du point du maître
dans le tableau de profil de
came.
%MFxy.i.24
RETURN_CMD_3 -
-
Résultat de la lecture :
Position du point du suiveur
dans le tableau de profil de
came.
%MDxy.i.27
PARAM_CMD_1
-
Valeur à écrire : Index du point
désiré.
%MFxy.i.31
PARAM_CMD_3
Valeur à écrire : Position du
maître
%MFxy.i.33
PARAM_CMD_4
Valeur à écrire : Position du
suiveur
%MWxy.i.19
ERROR_CMD
-
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Paramètre d’un profil de came : InterpType
Description
Ce paramètre permet de définir le style d'interpolation utilisé pour générer les
positions qui ne figurent pas explicitement dans les données du profil
Les algorithmes d'interpolation cubique obligent la dérivée première du point à être
continue, lorsque la dérivée première de n'importe quel point correspond à la pente
d'un segment linéaire entre le point précédent et le point suivant.
ATTENTION
Ne modifiez pas un profil, n'appelez pas les fonctions Configure,
SetCoord, ou SetInterpType lorsque le suivi fonctionne avec un Groupe
Suiveurs qui utilise le profil de came.
Le non-respect de ces instructions peut provoquer des blessures
ou des dommages matériels.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetInterpType qui envoie une requête de lecture du style d'interpolation courant,
SetInterpType qui envoie une requête d’écriture du nouveau style d'interpolation.
Ces fonctions utilisent l’instruction WRITE_CMD.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
InterpType.
Objet
Nom
%MWxy.i.26 ACTION_CMD
Code
Type
Description
fonction d’instruction
530
WRITE_CMD Commande de lecture
531
35009561.01 07/2008
Commande d’écriture
%MDxy.i.20
RETURN_CMD_1 -
-
Résultat de la lecture.
%MDxy.i.27
PARAM_CMD_1
-
-
Valeur à écrire : Type
d’interpolation
0 : linéaire,
1 : cubique.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
255
Réglage des modules TSX CSY 84 /164
Paramètre d’un profil de came : ProfileId
Description
Ce paramètre contient l’identification du profil.
Fonctions
associées
La fonction associée à ce paramètre est :
z
GetProfileId qui envoie une requête de lecture de la position de l’esclave suiveur
du profil,
Cette fonction utilise l’instruction WRITE_CMD.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
ProfileId.
Objet
Nom
%MWxy.i.26 ACTION_CMD
256
Code
Type
Description
fonction d’instruction
528
WRITE_CMD Commande de lecture
%MDxy.i.27
RETURN_CMD_1 -
-
Résultat de la lecture
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
-
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Description de l’écran TRF_RECIPE pour les profils de came
Introduction
Cet écran, situé au bas de l’écran de réglage d’un profil de came, permet de
transférer les paramètres de réglage entre l’automate et le variateur de vitesse
Cette fonctionnalité nécessite d’être en mode connecté.
Note : pour plus d’informations sur les parties communes des différents écrans de
réglage, voirDescription des écrans de réglage d’un module SERCOS®
:Généralités, p. 187.
Illustration
La figure ci-dessous montre l’écran associé à la fonction TRF_RECIPE.
Transférer les profils de came
Sens du transfert
Lecture
Table “maître”
Ecriture
Table “esclave”
Paramètres
Résultats
Lecture de la table “maître” et “esclave”
et transfert dans la mémoire automate :
Erreur transfert :
0
Longueur de la table lue :
75
Adresse table
%MW
Longueur
Description
Transférer
100
200
Le tableau ci-dessous présente la rubrique Sens du transfert de la zone
TRF_RECIPE.
Elément
Mot langage associé
Symbole/Description
Lecture/Ecriture
%MWxy.i.10
Voir TRF_RECIPE
Choisissez la ou les tables à
transférer
Table "maître"
Table "esclave"
Le tableau ci-dessous présente la rubrique Paramètres de la zone TRF_RECIPE.
35009561.01 07/2008
Elément
Mot langage associé
Description
Adresse table
%MDxy.i.11
Deux paramètres sont modifiables :
le type d’objet mémoire pour le stockage des données :
z %MW en lecture écriture
z %KW en lecture seulement
Valeur immédiate
l’adresse de début de table
Longueur
Valeur immédiate
Longueur de la table
257
Réglage des modules TSX CSY 84 /164
Le tableau ci-dessous présente la rubrique Résultat de la zone TRF_RECIPE.
258
Elément
Mot langage associé
Description
Erreur transfert
%MWxy.i.3
Ce champ fournit le code d’erreur (voir Défauts
d’écriture explicite d’une commande TRF_RECIPE,
p. 331) en cas de transfert invalide.
Longueur de la table lue
%MDxy.i.4
Longueur réelle de la table
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Instruction TRF_RECIPE
Rappel
Cette instruction permet lire ou d’écrire les profils de came et de lancer l’exécution
de fonctions spéciales.
Remarque : La longueur donnée en paramètre du TRF_RECIPE défini un nombre
de mots (double ou flottant) quel que soit le type d’information échangée.
Note : ce service permet également avec la fonction "Axe réel", de lire ou d’écrire
les paramètres des variateurs de vitesse (Voir TRF_RECIPE, p. 197).
Note : les échanges de paramètres (READ_PARAM, WRITE_PARAM,
SAVE_PARAM, RESTORE_PARAM) ne peuvent pas être exécutés en même
temps qu’une instruction TRF_RECIPE.
Syntaxe de
l’instruction
TRF_RECIPE
TRF_RECIPE %CHxy.i (longueur, adresse %MW) : transfert des paramètres du
profil de came à partir de la table de mots %MW. La longueur de cette table à
transférer est définie par le paramètre longueur. L’action a exécuter est définie par
le mot %MWxy.i.10 (ACTION_TRF).
Exemple : TRF_RECIPE %CH104.25(100,200) : lecture de la table "Esclave" du
profil de came 25 du module situé en position 4 du rack 1 et transfert dans
l’automate, à partir de l’adresse 200.
Interface
TRF_RECIPE
35009561.01 07/2008
La commande à réaliser est définie dans le mot %MWxy.i.10 et le résultat de la
commande est disponible dans le mot %MWxy.i.3 à %MWxy.i.8.
Adresse
Type
Symbole
Signification
%MWxy.i.10
Mot
ACTION_TRF
Action à réaliser
%MWxy.i.3
Mot
ERROR_TRF
Erreur d’écriture de la commande
TRF_RECIPE
%MDxy.i.4
Double Mot
RETURN_TRF_1
Retour 1 de la fonction
%MFxy.i.6
Flottant
RETURN_TRF_2
Retour 2 de la fonction
%MFxy.i.8
Flottant
RETURN_TRF_3
Retour 3 de la fonction
%MDxy.i.11
Double Mot
PARAM_TRF_1
Paramètre 1
%MDxy.i.13
Double Mot
PARAM_TRF_2
Paramètre 2
%MFxy.i.15
Flottant
PARAM_TRF_3
Paramètre 3
%MFxy.i.17
Flottant
PARAM_TRF_4
Paramètre 4
259
Réglage des modules TSX CSY 84 /164
Actions réalisées
par TRF_RECIPE
Les actions qu’il est possible de réaliser avec le service TRF_RECIPE sont :
Fonction
ACTION_TRF
(%MWxy.i.10)
Signification
Profil de came
1
Lecture de la table "maître".
Profil de came
2
Lecture de la table "esclave".
Profil de came
3
Lecture des tables "maître" et "esclave".
Profil de came
101
Ecriture de la table "maître".
Profil de came
102
Ecriture de la table "esclave".
Profil de came
103
Ecriture des tables "maître" et "esclave".
Légende
En écriture du Variateur vers le Module
PARAM_TRF_1 = 0. Sur MW
En écriture du Module vers le Variateur
PARAM_TRF_1 = 1. Sur KW
En lecture
PARAM_TRF_1 = 0.
PARAM_TRF_2 = l’OFFSET
PARAM_TRF_3 et PARAM_TRF_4 = 0
RETURN_TRF_1(%MDxy.i.4)=longueur de la
table lue ou écrite
RETURN8TRF_2 rt RETURN_TRF_3 = 0
Contrôle de
l’échange
260
Les 2 bits suivants peuvent être utilisés pour contrôler les échanges réalisés à l’aide
de l’instruction TRF_RECIPE :
Bit
Signification
%MWxy.i.0:X3
Echange en cours.
%MWxy.i.1:X3
Echange incorrect.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
7.5
Paramètres de l’anneau Sercos®
Présentation
Objectif de ce
sous-chapitre
Ce sous-chapitre présente l’écran de réglage de l’anneau SERCOS® et décrit les
paramètres de réglage associés.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Description de l’écran de réglage d’un module SERCOS® : Anneau
SERCOS®
262
Graphique de réglage de la puissance optique
263
Paramètre de l’anneau Sercos® : OpticalPower
264
261
Réglage des modules TSX CSY 84 /164
Description de l’écran de réglage d’un module SERCOS® : Anneau SERCOS®
Introduction
Cet écran permet de modifier directement en mode local ou connecté la valeur de
la puissance optique.
Il rappelle la valeur du temps de cycle courante de l’anneau.
Note : pour plus d’informations sur les parties communes des différents écrans de
réglage, voir Description des écrans de réglage d’un module SERCOS®
:Généralités, p. 187.
Illustration
La figure ci-dessous montre la zone de réglage de l’anneau SERCOS® sur un
module TSX CSY 84 (la configuration est la même sur un module TSX CSY 164) :
TSX CSY 84 [RACK 0 POSITION 4 ]
Réglage
Désignation : MOD.CDE AXE 8 VOIES N4
RUN
I/O
Symbole :
Tâche :
Voie :
Fonction :
0 Réseau
Bus SERCOSÒ
MAST
Voie configurées : 0,1,9,10,13,17,21,25
ERR
DIAG...
DIAG...
Paramètres constructeur
Temps de cycle : 4000 ms
Puissance optique : 66 %
Description
262
Le tableau ci-dessous présente la rubrique Paramètres constructeur de la zone
de réglage.
Elément
Paramètre
associé
Bit/Mot langage
associé
Symbole/Description
Temps de cycle
-
-
Valeur du temps de cycle
courante de l’anneau.
Puissance optique
-
%MWxy.i.37
Réglage de la puissance
optique.
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Graphique de réglage de la puissance optique
Puissance
optique
La puissance optique des modules TSX CSY 84 / 164, exprimée en pourcentage,
est fonction de la longueur du premier segment (compris entre le module
TSX CSY 84 ou le module TSX CSY 164 et le premier variateur de vitesse. La
configuration ou le réglage de la puissance optique doit être conforme au graphique
suivant :
100%
66%
15 m
35009561.01 07/2008
40 m
263
Réglage des modules TSX CSY 84 /164
Paramètre de l’anneau Sercos® : OpticalPower
Description
Ce paramètre permet de définir la puissance optique (sortie lumineuse) de
l’émetteur (DEL) de l'anneau SERCOS®.
Cette valeur est exprimée en pourcentage; avec un incrément réel de modification
de la puissance de 20%.
La puissance optique minimale (différente de 0) est de 66%. La puissance maximale
est de 100%. La sortie de la DEL est coupée si la valeur est 0%.
Note : la puissance optique par défaut est de 66%. Cette valeur est normalement
adaptée à tous les variateurs SERCOS® et à toutes les longueurs des câbles. Il
est possible de devoir réduire la valeur du paramètre de puissance si la longueur
de la fibre optique entre le contrôleur de mouvement et le premier variateur est très
courte. Dans ce cas, la réduction de la puissance optique peut éviter le
chevauchement des signaux dans le circuit de réception de la DEL du variateur.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetOpticalPower qui envoie une requête de lecture de la puissance optique
courante de l’émetteur,
SetOpticalPower qui envoie une requête d’écriture de la nouvelle puissance
optique de l’émetteur.
Ces fonctions utilisent, selon les objets langage, les instructions WRITE_CMD,
READ_PARAM ou WRITE_PARAM.
Objets langage
associés
Le tableau ci-dessous présente les différents objets langage liés au paramètre
OpticalPower.
Objet
Nom
%MWxy.i.26 ACTION_CMD
264
Code
Type
Description
fonction d’instruction
1547
WRITE_CMD Commande de lecture
2547
Commande d’écriture
%MFxy.i.22
RETURN_CMD_2 -
-
Résultat de la lecture.
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir
(Commande WRITE_CMD :
Erreurs de programmation,
p. 325)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
7.6
Fonctions de lecture/écriture des IDN SERCOS®
Présentation
Titre de ce
sous-chapitre
Cette section décrit les fonctions de lecture / écriture des identificateurs SERCOS®
et donne la liste des identificateurs standard.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Paramètres Variateurs : IDN_S et IDN_P
35009561.01 07/2008
Page
266
Paramètres Variateurs : IDN_US etIDN_UP
268
Numéros d'identification (IDN) SERCOS standard
271
IDN des télégrammes personnalisés
274
265
Réglage des modules TSX CSY 84 /164
Paramètres Variateurs : IDN_S et IDN_P
Description
Ces paramètres permettent de piloter directement les variateurs par l’application
(indépendemment des modules TSX CSY 84 / 164).
Ils se décomposent en 2 catégories :
z
z
IDN_S dits standards (Norme SERCOS®), Voir (Numéros d'identification (IDN)
SERCOS standard, p. 271),
IDN_P dits propriétaires (spécifiques aux constructeurx de variateurs, voir
documentations variateurs).
Note : ces documentations fabricants doivent préciser :
z la taille du paramètre (16 ou 32 bit),
z si le paramètre est signé ou non signé,
z la phase de rebouclage SERCOS® dans lequel le paramètre est autorisé,
z les valeurs autorisées pour le paramètre,
z le type d'échelle (le cas échéant) qui doit être utilisé pour interpréter les
données.
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetIDN_S et GetIDN_P qui envoient une requête de lecture des paramètres
courants des numéros d'identification (IDN) SERCOS®). Ces paramètres sont
lus au travers du module de commande d’axes.
SetIDN_S et SetIDN_P qui envoient une requête d’écriture des nouveaux
paramètres des numéros d'identification (IDN) SERCOS®).
Note : (IDN) SERCOS®, : respectivement S-0-xxxx (paramètres standard) et P-0xxxx (paramètres propres aux produits)
Ces fonctions sont uniquement utilisables pour la lecture et l’écriture de paramètres
16 ou 32 bits dans le variateur SERCOS®. Ces fonctions ne permettent pas
d'accéder aux paramètres de texte SERCOS® de longueur variable.
Dans le cas de lecture, les paramètres 16 et 32 bits sont renvoyés sous forme de
valeurs 32 bits. Les valeurs IDN SERCOS® 16 bits sont étendues en retour sur 32
bits en fonction du type de numéro d'identification (IDN) SERCOS 16 bits.
Par exemple, si le paramètre SERCOS® 16 bits est signé, la valeur 16 bits est
étendue à une valeur 32 bits signée. De même, si le paramètre SERCOS® 16 bits
est non signé, la valeur 16 bits est étendue en plaçant des zéros (0) dans les 16 bits
supérieurs de la valeur 32 bits renvoyée.
266
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Note : certains paramètres IDN SERCOS® sont associés à des unités et à des
facteurs d’échelle. Aussi, ces fonctions ne permettent-elles pas de convertir les
paramètres (valeurs en unités par défaut de l’axe en unités variateur ou
inversement). (Utilisez alors les fonctions IDN_US et IDN_UP)
Ces fonctions utilisent l’instruction WRITE_CMD.
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
OpticalPower.
Objet
Nom
%MWxy.i.26 ACTION_CMD
%MWxy.i.26
Code
fonction
Type
d’instruction
Description
1556
WRITE_CMD
Commande de lecture IDN_S
2556
Commande d’écriture IDN_S
1557
Commande de lecture IDN_P
2557
35009561.01 07/2008
Commande d’écriture IDN_P
%MDxy.i.20
RETURN_CMD_1 -
-
Résultat de la lecture.
%MDxy.i.27
PARAM_CMD_1
-
Valeur à écrire : IDNSercos. Plage type de
1 à 4095. Cependant, l'utilisation des bits
12 à 14 est autorisée. Ces bits indiquent
les paramètres système en cours de
sélection. (Veuillez vous reporter à la
documentation du variateur pour
connaître les paramètres système pris en
charge
%MDxy.i.29
PARAM_CMD_2
-
-
Valeur à écrire dans le variateur
%MFxy.i.31
PARAM_CMD_3
-
-
Valeur à écrire : AdresseSercos. Ce
paramètre et indispensable si vous
utilisez la fonction GetIDN sur l'IDAxe 999
du BusSercos.
%MWxy.i.19
ERROR_CMD
-
-
Compte rendu d’erreur. Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
-
267
Réglage des modules TSX CSY 84 /164
Paramètres Variateurs : IDN_US etIDN_UP
Description
Ces paramètres sont associés à des unités ou à des facteurs d’échelle.
Ils permettent de piloter directement les variateurs par l’application
(indépendemment des modules TSX CSY 84 / 164).
Ils se décomposent en 2 catégories :
z
z
IDN_US dits Utilisateurs standards (Norme SERCOS®), Voir (Numéros d'identification (IDN) SERCOS standard, p. 271),
IDN_UP dits Utilisateurs propriétaires (spécifiques aux constructeurx de
variateurs, voir documentations variateurs).
Note : ces documentations fabricants doivent préciser :
z si le paramètre comporte des unités,
z la phase de rebouclage SERCOS® dans lequel le paramètre est autorisé,
z les valeurs autorisées pour le paramètre,
Les informations figurant dans la documentation du variateur concernant la mise
à l'échelle du paramètre et la détermination des unités ne s'appliquent pas dans
ce cas. Le contrôleur de mouvement convertira le paramètre à partir des
informations fournies par le variateur.
268
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Fonctions
associées
Les fonctions associées à ce paramètre sont :
z
z
GetIDN_US et GetIDN_UP qui envoient une requête de lecture des paramètres
courants des numéros d'identification (IDN) SERCOS®) sous forme d’un nombre
en virgule flottante qui a été converti d’unités variateur en unités par défaut de
l’axe.
SetIDN_US et SetIDN_UP qui envoient une requête d’écriture des nouveaux
paramètres des numéros d'identification (IDN) SERCOS®) sous forme d'un
nombre en virgule flottante exprimé en unités par défaut de l'axe pour ce
paramètre. Le contrôleur de mouvement convertit cette valeur d'unités par défaut
de l'axe en unités variateur; il écrit la valeur convertie dans le variateur.
Note : (IDN) SERCOS®, : respectivement S-0-xxxx (paramètres standard) et P-0xxxx (paramètres propres aux produits)
Note : ces fonctions ne permettent pas d’accéder aux paramètres SERCOS® qui
ne comportent pas d’unités ni de paramètres de texte de longueur variable.
Note : ces paramètres peuvent également être lus/écrits par les fonctions Get/
SetIDN_S ou Get/SetIDN_P, Il est alors nécessaire de prendre garde aux unités
utilisées.
Ces fonctions utilisent l’instruction WRITE_CMD.
35009561.01 07/2008
269
Réglage des modules TSX CSY 84 /164
Objets langage
Le tableau ci-dessous présente les différents objets langage liés au paramètre
OpticalPower.
Objet
Nom
%MWxy.i.26 ACTION_CMD
%MWxy.i.26 ACTION_CMD
Code
Type
fonction d’instruction
Description
1558
WRITE_CMD
Requête de lecture IDN_US
2558
WRITE_CMD
Requête d’écriture IDN_US
1559
WRITE_CMD
Requête de lecture IDN_UP
2559
WRITE_CMD
Requête d’écriture IDN_UP
%MFxy.i.22
RETURN_CMD_2
-
-
Compte rendu de lecture : Valeur (1) du
paramètre en virgule flottante.
%MDxy.i.27
PARAM_CMD_1
-
-
IDNSercos. Plage type de 1 à 4095.
Cependant, l'utilisation des bits 12 à 14
est autorisée. Ces bits indiquent les
paramètres système en cours de
sélection. (Veuillez vous reporter à la
documentation du variateur pour
connaître les paramètres système pris en
charge
%MFxy.i.31
PARAM_CMD_3
-
-
AdresseSercos. Ce paramètre et
indispensable si vous utilisez la fonction
GetIDN sur l'IDAxe 999 du BusSercos.
%MFxy.i.33
PARAM_CMD_4
-
-
Contenu de la variable : Valeur (1) du
paramètre en virgule flottante.
-
-
Compte rendu d’erreur. Voir (Commande
WRITE_CMD : Erreurs de
programmation, p. 325)
%MWxy.i.19 ERROR_CMD
Légende
(1)
270
Cette valeur est exprimée dans les unités par défaut de l'axe pour ce type de paramètre
(ex. unités de position, de vitesse, d'accélération, de couple, de temps)
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Numéros d'identification (IDN) SERCOS standard
Paramètres de
position
Paramètres de
vitesse
Paramètres de
couple/moteur
35009561.01 07/2008
Le tableau suivant liste les IDN des paramètres de position :
IDN
Nom IDN standard
S-0-0032
Mode d'exploitation primaire
S-0-0053
Valeur de recopie de position 2 (retour externe)
S-0-0055
Paramètre de polarité de position
S-0-0116
Résolution du retour de rotation 1
S-0-0117
Résolution du retour de rotation 2
S-0-0121
Tours d'entrée du ratio de chargement
S-0-0122
Tours de sortie du ratio de chargement
S-0-0123
Constante d'alimentation
S-0-0206
Temporisation de démarrage du variateur
S-0-0207
Temporisation d'arrêt du variateur
S-0-0256
Facteur de multiplication 1
S-0-0257
Facteur de multiplication 2
Le tableau suivant liste les IDN des paramètres de vitesse :
IDN
Nom IDN standard
S-0-0037
Valeur de commande de vitesse additive
S-0-0040
Valeur de retour vitesse
Le tableau suivant liste les IDN des paramètres de couple/moteur :
IDN
Nom IDN standard
S-0-0084
Valeur de retour couple
S-0-0092
Valeur limite de couple bipolaire
S-0-0111
Courant continu de calage du moteur
271
Réglage des modules TSX CSY 84 /164
Paramètres de
limites
Diagnostics
Paramètres
d'échelle
272
Le tableau suivant liste les IDN des paramètres de limites :
IDN
Nom IDN standard
S-0-0038
Valeur limite de vitesse positive
S-0-0039
Valeur limite de vitesse négative
S-0-0049
Valeur limite de position positive
S-0-0050
Valeur limite de position négative
S-0-0091
Valeur limite de vitesse bipolaire
S-0-0114
Charge limite du moteur
S-0-0136
Limite d'accélération positive
S-0-0138
Valeur limite d'accélération bipolaire
Le tableau suivant liste les IDN des diagnostics :
IDN
Nom IDN standard
S-0-0011
Diagnostic classe 1 (C1D)
S-0-0012
Diagnostic classe 2 (C2D)
S-0-0013
Diagnostic classe 3 (C3D)
S-0-0041
Vitesse de prise d'origine
S-0-0042
Accélération de prise d'origine
S-0-0147
Paramètre de prise d'origine
S-0-0148
Commande de prise d'origine par variateur
S-0-0298
Distance du détecteur d'origine
S-0-0400
Détecteur d'origine
S-0-0403
Etat de la valeur de recopie de position
Le tableau suivant liste les IDN de paramètres d'échelle :
IDN
Nom IDN standard
S-0-0044
Type d'échelle des données de vitesse
S-0-0086
Type d'échelle des données de couple
S-0-0093
Facteur d'échelle des données de couple/effort
S-0-0094
Exposant d'échelle des données de couple/effort
S-0-0160
Type d'échelle des données d'accélération
35009561.01 07/2008
Réglage des modules TSX CSY 84 /164
Sonde
Le tableau suivant liste les IDN de sonde :
IDN
Paramètres des
gains
Variateurs,
sauvegarde de
variateur et
"checksums"
35009561.01 07/2008
Nom IDN standard
S-0-0130
Front positif 1 de la valeur de sonde
S-0-0131
Front négatif 1 de la valeur de sonde
S-0-0169
Paramètre de commande de la sonde
S-0-0170
Commande de cycle de la sonde
S-0-0179
Etat sonde
Le tableau suivant liste les IDN des paramètres des gains :
IDN
Nom IDN standard
S-0-0296
Gain d'anticipation de vitesse
Le tableau suivant liste les IDN de variateurs, de sauvegarde de variateur et de
"checksums" :
IDN
Nom IDN standard
S-0-0192
Liste des numéros d'identification (IDN) des données opérationnelles de
sauvegarde
S-0-0271
ID variateur
S-0-0263
Commande de chargement de la mémoire de travail en cours
S-0-0264
Commande de sauvegarde de la mémoire de travail en cours
273
Réglage des modules TSX CSY 84 /164
IDN des télégrammes personnalisés
Télégrammes
personnalisés
274
Le tableau suivant liste les IDN des télégrammes personnalisés :
IDN
Nom IDN standard
S-0-0016
Liste de configuration des données cycliques AT (télégramme amplificateur)
S-0-0024
Liste de configuration des MDT (télégrammes des données du maître)
S-0-0130
Front positif de la sonde 1
S-0-0131
Front négatif de la sonde 1
S-0-0037
Commande de vitesse additive
S-0-0053
Valeur de recopie de position 2 (codeur externe)
S-0-0084
Valeur de retour de couple
S-0-0185
Longueur de l'enregistrement des données configurables dans le télégramme
amplificateur (AT)
S-0-0187
Liste des numéros d'identification (IDN) des données configurables dans le
télégramme amplificateur (AT)
S-0-0188
Liste des numéros d'identification (IDN) des données configurables dans le
MDT
S-0-0186
Longueur de l'enregistrement des données configurables dans le MDT
35009561.01 07/2008
Mise au point des modules
TSX CSY 84 / 164
8
Présentation
Objet de ce
chapitre
Ce chapitre décrit les fonctions de mise au point d’une voie SERCOS®.
Tout ce qui s’applique au module TSX CSY 84 est valable pour le module
TSX CSY 164.
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Description de l’écran de mise au point : Généralités
276
Interface utilisateur de l’écran de mise au point
279
Mise au point : Validation
280
Mise au point : Diagnostic
282
Mise au point : Mouvement
285
Mise au point : Envoi de commande (mode Auto)
287
Mise au point : Commande manuelle (mode Manuel)
288
Mise au point : Référence
289
Mise au point : Suivi
290
Mise au point : Variateur
291
Mise au point : Position
292
Diagnostic du module
293
Diagnostic de la voie
294
275
Mise au point des modules TX CSY 84 / 164
Description de l’écran de mise au point : Généralités
Introduction
Les différents écrans de mise au point permettent, pour chaque type de voie, de
visualiser l’état des entrées et des sorties d’une voie du module ainsi que les défauts
éventuels.
Il permet également de commander des objets langage (mise à 1 ou à 0, forçage ou
déforçage d’un bit, ...).
Ces paramètres sont accessibles en mode connecté.
Il donne également accès aux écrans de configuration et de réglage.
Note : Consultez la partie Communs fonctions métiers pour une présentation du
processus de configuration, réglage et mise au point d’une application.
276
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Illustration
La figure ci-dessous montre un exemple d’écran de mise au point du module
TSX CSY 84 (l’écran de mise au point du module TSX CSY 164 est identique) :
1
2
3
TSX CSY 84 [RACK 0
POSITION 10]
Mise au point
Désignation : MOD.CDE AXE 8 VOIES N4
RUN
ERR
Symbole :
4
Voie :
Fonction :
1 réel
Axe réel
Voies configurées: 0,1,9,10,13,14,17,21,22,26
Validation
Variateurs
IO
DIAG...
Manu
Tâche :
MAST
DIAG...
Auto
Diagnostic
Acquittement
Axe
Variateurs Axe
Autorisation acquittement
Communication
Commande
Validé
Erreur
Validation
Warning
Dévalidation
Configuration/paramétrage
Non configuré
Etat
N° paramètre
16#00
Phase 4
0
Type erreur
16#00
Mouvement
5
Transition de vitesse
Vitesse constante
Arrêt en cours
Fin de mouvement
Prise de référence en cours
Position courante
Axe OK
Référencé
Dans fenêtre au point
Arrêt au point
Limite position haute
Limite position basse
Appartient à un groupe
Pause en cours
Reprise en cours
Pause éffectuée
Arrêt commandé
Arrêt immédiat commandé
3.776550e-003
Arrêt immédiat
Arrêt
Commande manuelle
JOG +
JOG INCR -
INCR +
Vitesse
1.000000e+003
Incrément
0.000000e+000
Variateur
Référence
Prise de référence
Vitesse
1.000000e+003
Position
0.000000e+000
Sens
Entrée 1
Sortie 1
Entrée 2
Sortie 2
Référence forcée
Forçage position
35009561.01 07/2008
277
Mise au point des modules TX CSY 84 / 164
Description
Le tableau ci-dessous présente les différents éléments de l’écran de réglage et leurs
fonctions.
Repère
Elément
Fonction
1
Barre de titre
Rappelle la référence du module sélectionné et sa position physique dans le rack.
2
Zone de
commande
Indique l’écran en cours (Mise au point) et permet de passer ou revenir aux autres
écrans :
z Configuration, accessible seulement en mode lacal
z Réglage.
3
Zone module
Affiche la désignation du module sélectionné.
Visualise l’état des voyants RUN, ERR, I/O
Fournit un accès direct au diagnostic du module lorsque celui-ci est en défaut (signalé
par le voyant intégré au bouton d’accès au diagnostic DIAG, qui prend la couleur rouge).
4
Zone voie
Permet de choisir la voie à régler, modifier (en cas de choix multiple) la fonction associée
à la voie,
Indique la tâche dans laquelle est configurée la voie,
Permet l’accès au mode manuel (axes réel et imaginaire),
Fournit un accès direct au diagnostic de la voie lorsque celle-ci est en défaut
5
Zone de mise
au point
Cette zone affiche l’état des entrées, des sorties et différents paramètres en cours. Elle
permet également de piloter en mode manuel des mouvements d’axes.
278
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Interface utilisateur de l’écran de mise au point
Introduction
L’écran de mise au point donne accès à l’état des bits d’entrées et de sorties par
l’intermédiaire de voyants.
Il permet également de commander des objets langage (%Q) à l’aide de boutons de
commande
Note : Positionnez le pointeur de la souris sur le voyant/bouton désiré pour
visualiser l’objet langage correspondant.
L’écran de mise au point permet enfin de modifier d’envoyer des commandes de
mouvement.
Boutons de
commande
Le tableau ci-dessous les différent aspects possibles des boutons de commande.
Commande
fonction
Le bit associé à ce bouton est à l’état 0. Un clic gauche permet de
faire passer le bit à l’état 1.
Le bit associé à ce bouton est à l’état 1. Un clic gauche permet de
faire passer le bit à l’état 0.
(1)
Forçage à 0 F4
Forçage à 1 F5
Déforçage F6
(2)
F
(3)
Lorsqu’un objet peut être forcé, un clic droit sur le bouton
correspondant (1) visualise un menu (2) qui donne accès aux
commandes de forçage : Forçage à 0, Forçage à 1 ou Déforçage.
Après sélection de la commande par un clic sur celle-ci, le forçage
est appliqué et l’état de forçage est signalé au niveau du bouton
(3) :
z F pour forçage à 0,
z F en vidéo inverse (dans l’exemple) pour forçage à 1.
Remarque : Lorsqu’un objet langage est forcé, le clic gauche
souris est inopérant
Ce bouton est associé à des bits de défaut actuellement à l’état 0.
Ce bouton est associé à des bits de défaut actuellement à l’état 1.
Effectuez un clic gauche sur celui-ci pour faire apparaître des
informations sur le défaut.
35009561.01 07/2008
279
Mise au point des modules TX CSY 84 / 164
Mise au point : Validation
Introduction
Ce champ permet de valider ou de dévalider un axe. La validation de l’axe, pour être
effective, doit être réalisée au niveau module et au niveau du variateur
Note : Ce champ concerne les axes réels, imaginaires ou à mesure externe ainsi
que les groupes d’axes coordonnés et suiveurs.
Illustration
L’illustration ci-dessous montre le champ Validation de l’écran de mise au point.
Validation
Variateurs
Groupe
Validé
Validation
Dévalidation
280
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Description
Le tableau ci-dessous décrit les différents éléments de la zone Variateur du champ
Validation.
Elément
Objet langage
associé
Description
Voyant Validé
Voir Bit DRIVE_ENABLED (%Ixy.i.10), p. 112.
Bouton Validation
%Qxy.i.10
Validation de l’axe au niveau du variateur.
Bouton Dévalidation
%Qxy.i.26
Dévalidation de l’axe au niveau du variateur.
Le tableau ci-dessous décrit les différents éléments de la zone Axe du champ
Validation.
Elément
Objet langage
associé
Voyant Validé
35009561.01 07/2008
Description
Voir Bit AXIS_IN_COMMAND (%Ixy.i.18),
p. 123.
Bouton Validation
%Qxy.i.2
Validation de l’axe au niveau de l’axe.
Bouton Dévalidation
%Qxy.i.18
Dévalidation de l’axe au niveau de l’axe.
281
Mise au point des modules TX CSY 84 / 164
Mise au point : Diagnostic
Introduction
Ce champ permet de visualiser et d’acquitter les défauts de l’axe.
Note : Ce champ concerne les différents types d’axes, groupes d’axes et profil de
came.
Illustration
L’illustration ci-dessous montre le champ Diagnostic de l’écran de mise au point.
Diagnostique
Acquittement
Variateur
Autorisation acquittement
Axe
Communication
Erreur
Warning
Commande
Phase 4
0
Configuration/paramétrage
Non configuré
Etat
N° paramètre
16#FF
282
Type erreur
16#FF
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Description
Le tableau ci-dessous décrit les différents éléments hors zone du champ Diagnostic.
Ces éléments ne sont pas disponibles dans l’écran Profil de came.
Elément
Objet
langage
associé
Description
Bouton Acquittement
%Qxy.i.15
Acquittement des défauts
Bouton Autorisation acquittement
%Qxy.i.31
Validation des défauts
Le tableau ci-dessous décrit les différents éléments de la zone Variateur du champ
Diagnostic. Ces éléments ne sont pas disponibles dans l’écran Profil de came.
Elément
Description
Voyant Erreur
Bouton Erreur
Voir Bit DRIVE_FAULT (%Ixy.i.13), p. 115.
(1)
Voyant Warning
Bouton Warning
Voir Bit DRIVE_WARNING (%Ixy.i.12), p. 114.
(1)
Voyant Etat
Bouton Etat
Voir Bit DRIVE_DIAG (%Ixy.i.11), p. 113.
(1)
(1) : Lorsque le voyant est allumé, un clic gauche sur le bouton ouvre une fenêtre
affichant le type de défaut.
Le tableau ci-dessous décrit les différents éléments de la zone Axe du champ
Diagnostic. Cette zone n’existe pas dans l’écran Profil de came.
Elément
Description
Voyant Erreur
Bouton Erreur
Voir Bit AXIS_SUMMARY_FAULT (%Ixy.i.15), p. 117.
(1),
Remarque : L’information défaut variateur n’est pas à prendre en
compte lorsqu’il y a une erreur de communication SERCOS®
Voyant Warning
Bouton Warning
Voir Bit AXIS_WARNING (%Ixy.i.23), p. 124.
(1)
(1) : Lorsque le voyant est allumé, un clic gauche sur le bouton ouvre une fenêtre
affichant le type de défaut.
Le tableau ci-dessous décrit les différents éléments de la zone Communication du
champ Diagnostic Cette zone n’existe pas ou est indisponible dans l’écran Profil de
came et axe imaginaire.
35009561.01 07/2008
Elément
Objet langage
associé
Description
Voyant Phase 4
%Ixy.i.16
VoirBit AXIS_COMM_OK (%Ixy.i.16), p. 118.
283
Mise au point des modules TX CSY 84 / 164
Le tableau ci-dessous décrit les différents éléments de la zone Commande du
champ Diagnostic.
Elément
Objet langage
associé
Description
Voyant
%MWxy.i.1:X2
Commande explicite (Action_CMD) en erreur.
Champ
%MWxy.i.19
Valeur possibles :
0 : paramètres Ok.
Sinon un Code erreur. Voirchapitre commande
write_cmd:erreurs de programmation (Voir Commande
WRITE_CMD : Erreurs de programmation, p. 325)
Le tableau ci-dessous décrit les différents éléments de la zone Configuration/
paramétrage du champ Diagnostic.
284
Elément
Objet langage
associé
Description
Voyant Non configuré
%Ixy.i.32
La voie est configurée.
Champ N° paramètre
%IW2xy.i.:X0 à X7
Indique le paramètre en défaut.Voir
chapitre registres en défauts (Voir
Registres en défauts, p. 320)
Champ Type erreur
%IW2xy.i.:X8 à X15
Indique le type d’erreur.Voir (Voir Liste
d’erreurs de configuration et de
réglage, p. 318)
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Mise au point : Mouvement
Introduction
Ce champ permet de visualiser les bits d’état du module et piloter le mouvement de
l’axe sélectionné.
Note : Il concerne les axes réels ou imaginaires ainsi que les groupes d’axes
coordonnés.
Illustration
L’illustration ci-dessous montre le champ Mouvement de l’écran de mise au point.
Mouvement
Transition de vitesse
Axe OK
Référencé
Vitesse constante
Dans fenêtre au point
Arrêt en cours
Arrêt au point
Pause en cours
Fin de mouvement
Limite position haute
Reprise en cours
Arrêt commandé
Prise de référence en cours
Limite position basse
Pause effectuée
Arrêt immédiat commandé
Position courante
35009561.01 07/2008
0.000000e+000
mm
Appartient à un groupe
Reprise
Pause
Arrêt immédiat
Arrêt
285
Mise au point des modules TX CSY 84 / 164
Description
Le tableau ci-dessous décrit les différents éléments du champ Mouvement.
Elément
Objet langage
associé
Description
Voyant Transition de vitesse
Voir Bit RAMPING (%Ixy.i.0), p. 102.
Voyant Vitesse constante
Voir Bit STEADY (%Ixy.i.1), p. 103.
Voyant Arrêt en cours
Voir Bit STOPPING (%Ixy.i.2), p. 104.
Voyant Fin de mouvement
Voir Bit PROFILE_END (%Ixy.i.3), p. 105.
Voyant Prise de référence en cours
Voir Bit AXIS_HOMING (%Ixy.i.5), p. 107.
Voyant Axe OK (uniquement axe unitaire)
Voir Bit AXIS_READY (%Ixy.i.31), p. 132.
Voyant Référencé (uniquement axe unitaire)
Voir Bit AXIS_HOMED (%Ixy.i.6), p. 108.
Voyant Dans fenètre au point
Voir Bit IN_POSITION (%Ixy.i.4), p. 106.
Voyant Arrêt au point
Voir Bit AXIS_AT_TARGET (%Ixy.i.20), p. 120.
Voyant Limite position haute
Voir BIt AXIS_POS_LIMIT (%Ixy.i.21), p. 121.
Voyant Limite position basse
Voir Bit AXIS_NEG_LIMIT (%Ixy.i.22), p. 122.
Voyant Pause en cours
Voir Bit HOLDING (%Ixy.i.8), p. 110.
Voyant Reprise en cours
Voir Bit RESUMING (%Ixy.i.9), p. 111.
Voyant Pause effectuée
Voir Bit AXIS_HOLD (%Ixy.i.28), p. 129.
Voyant Arrêt commandé
Voir Bit AXIS_HALT (%Ixy.i.29), p. 130.
Voyant Arrêt immédiat commandé
Voir Bit AXIS_FASTSTOP (%Ixy.i.30), p. 131.
Voyant Appartient à un groupe (uniquement axe
unitaire)
Voir Bit AXIS_IS_LINKED (%Ixy.i.17), p. 119.
Bouton Reprise
%Qxy.i.12
Commande de reprise suite à un arrêt.
Bouton Pause
%Qxy.i.28
Arrêt temporaire de l’axe.
Voyant Arrêt immédiat
%Qxy.i.30
Commande d’arrêt d’urgence.
Voyant Arrêt
%Qxy.i.29
Arrêt de l’axe.
Champ Position courante (uniquement axe
unitaire)
%IFxy.i.0
Valeur de la position courante.
286
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Mise au point : Envoi de commande (mode Auto)
Introduction
Ce champ, spécifique au mode Auto, permet de lancer une commande de
mouvement à l’aide d’échanges explicites.
Illustration
L’illustration ci-dessous montre le champ Envoi de commande de l’écran de mise au
point.
Envoi de commande
Code
Commande en cours
0
1° paramètre
0
Retour 1
0
2° paramètre
0
Retour 2
0.000000e+000
3° paramètre
0.000000e+000
Retour 3
0.000000e+000
4° paramètre
0.000000e+000
ENVOI COMMANDE
Description
Le tableau ci-dessous décrit les différents éléments du champ Envoi de commande.
Elément
Objet langage
associé
Description
Champ Code
%MWxy.i.26
Code fonction.
Voyant Commande en cours
%MWxy.i.0:X1
(Voir Contrôle de l’échange, p. 350)
Champs Paramètre
%MWxy.i.27 à 33 (1)
%MWxy.i.27 à 44 (2)
Paramètres de la fonction
Champs Retour N
%MDxy.i.20
%MFxy.i.22
%MFxy.i.24
Résultats de la commande
Bouton Commande
-
Echange explicite par WRITE_CMD.
Note : Consultez la documentation correspondant à la fonction souhaité pour plus d’informations.
(1) : Axes réels, imaginaire et groupes d’axes suiveurs.
(2) : Groupes d’axes coordonnés.
35009561.01 07/2008
287
Mise au point des modules TX CSY 84 / 164
Mise au point : Commande manuelle (mode Manuel)
Introduction
Ce champ, spécifique au mode manuel, permet de lancer une commande de
mouvement continu (JOG) ou incrémental (INC).
Note : Il concerne les axes réels et imaginaires.
Illustration
L’illustration ci-dessous montre le champ Commande manuelle de l’écran de mise
au point.
Commande manuelle
JOG INCR -
Description
JOG +
INCR +
Vitesse
1.000000e+003
Incrément
0.000000e+000
Le tableau ci-dessous décrit les différents éléments du champ Commande
manuelle.
Elément
Objet langage
associé
Description
JOG+
%Qxy.i.4
voir Mode manuel, p. 140.
Le bouton associé à cette commande est de type
poussoir.
JOG-
%Qxy.i.5
voir Mode manuel, p. 140.
Le bouton associé à cette commande est de type
poussoir.
INC+
%Qxy.i.13
voir Mode manuel, p. 140.
INC-
%Qxy.i.14
voir Mode manuel, p. 140.
Vitesse
-
valeur configurée par défaut (1/2 de VMax). Celleci est modifiable par l'écran mais aussi par la
commande SetDefaultSpeed (2065) via
PARAM_CMD_3.
Incrément
%QDxy.i
valeur de l’incrément souhaitée.
288
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Mise au point : Référence
Introduction
Ce champ, spécifique au mode manuel, permet de référencer l’axe à une position
donnée dite "Origine".
Illustration
L’illustration ci-dessous montre le champ Référence de l’écran de mise au point.
Référence
Prise de référence
Vitesse
1.000000e+003
Position
0.000000e+000
Sens
Référence forcée
Forçage position
Description
35009561.01 07/2008
Le tableau ci-dessous décrit les différents éléments du champ Référence.
Elément
Description
Prise de référence
Effectue une prise d’origine (voir Fonction Home, p. 144).
Vitesse
Vitesse de déplacement pour atteindre le point d’origine.
Sens
Sens de rotation (positif ou négatif) pour atteindre le point d’origine
Référence forcée
La position de l’axe devient le point d’origine (voir Fonction
ForcedHomed, p. 147).
Forçage position
Modifie le point d’origine sans y référencer l’axe voir (Fonction
SetPosition, p. 149).
Position
Valeur de forçage de la position d’origine.
289
Mise au point des modules TX CSY 84 / 164
Mise au point : Suivi
Introduction
Ce champ permet d’activer ou de désactiver le suivi des axes esclave.
Note : Ce champ concerne les axes réels et imaginaires.
Illustration
L’illustration ci-dessous montre le champ Suivi de l’écran de mise au point.
Suivi
Bias activé
Suivi
Arrêt suivi
Description
Le tableau ci-dessous décrit les différents éléments du champ Suivi.
Elément
Objet langage associé
Description
Voyant Bias activé
%Ixy.i.24
Offset ajouté à la position de commande
Bouton Suivi
%Qxy.i.11
Bits de commande modifiables sur changement d’état, p. 138
Bouton Arrêt suivi
%Qxy.i.27
Bits CommandeMouvement modifiables sur front, p. 137
290
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Mise au point : Variateur
Introduction
Ce champ permet de piloter des entrées et des sorties du variateur. Ces entrées/
sorties sont définies par l’utilisateur.
Note : Ce champ n’existe que dans l’écran Axe réel.
Illustration
L’illustration ci-dessous montre le champ Variateur de l’écran de mise au point.
Variateur
Description
Input 1
Ouput 1
Input 2
Ouput 2
Le tableau ci-dessous décrit les différents éléments du champ Variateur.
Elément
Objet langage
associé
Description
Voyant Input 1
%I26
Voir Bit DRIVE_REALTIME_BIT1 (%Ixy.i.26),
p. 127
Voyant Input 2
%I27
Voir Bit DRIVE_REALTIME_BIT2 (%Ixy.i.27),
p. 128
Bouton Output 1
%Q6
Commande variateur
Bouton Output2
%Q7
35009561.01 07/2008
291
Mise au point des modules TX CSY 84 / 164
Mise au point : Position
Introduction
Ce champ permet de visualiser, depuis l’application, la position d’un axe externe .
Note : Ce champ n’existe que dans l’écran Axe à mesure externe.
Illustration
L’illustration ci-dessous montre le champ Position de l’écran de mise au point.
Position
Courante
Commandée
Description
Elément
0.000000e+000
0.000000e+000
mm
mm
Le tableau ci-dessous décrit les différents éléments du champ Position.
Objet langage
associé
Description
Champ Courante
%IF0
Valeur de la position courante.
Champ Commandée
%QD0
Valeur définie par l’application.
292
35009561.01 07/2008
Mise au point des modules TX CSY 84 / 164
Diagnostic du module
Présentation
La fonction Diagnostic module affiche, lorsqu’ils existent, les défauts en cours,
classés selon leur catégorie :
z défauts internes (modules en panne, autotest en cours),
z défauts externes (défaut bornier),
z autres défauts (défaut de configuration, module absent ou hors tension, voie(s)
en défaut (détail dans le diagnostic de la voie).
Un module en défaut se matérialise par le passage en rouge de certains voyants
tels que :
z dans l’éditeur de configuration niveau rack :
z le voyant de la position du module,
z dans l’éditeur de configuration niveau module :
z les voyants Err et I/O selon le type de défaut,
z le voyant Diag .
Marche à suivre
Le tableau ci-dessous présente la marche à suivre pour accéder à l’écran
Diagnostic module.
Etape
Action
1
Accédez à l’écran de mise au point du module.
2
Cliquez sur le bouton Diag situé dans la zone module.
Résultat : La liste des défauts module apparaît.
Diagnostic Module
Défauts internes
Défauts externes
Autres défauts
Voie(s) en défaut
OK
Remarque : Lors d'un défaut de configuration, en cas de panne majeure ou
d’absence du module , l'accès à l'écran de diagnostic module n'est pas
possible. Le message suivant apparaît alors sur l'écran : Le module est
absent ou différent de celui configuré à cette position.
35009561.01 07/2008
293
Mise au point des modules TX CSY 84 / 164
Diagnostic de la voie
Présentation
La fonction Diagnostic voie affiche, lorsqu’ils existent, les défauts en cours, classés
selon leur catégorie :
z défauts internes (voie en panne),
z défauts externes (défaut liaison ou alimentation capteur),
z autres défauts (défaut bornier, défaut de configuration, défaut de
communication).
Une voie en défaut se matérialise par le passage en rouge du voyant Diag situé
dans la colonne Err de l’éditeur de configuration.
Marche à suivre
Le tableau ci-dessous présente la marche à suivre pour accéder à l’écran
Diagnostic voie.
Etape
Action
1
Accédez à l’écran de mise au point du module.
2
Cliquez, pour la voie en défaut, sur le bouton Diag situé dans la colonne Err.
Résultat : La liste des défauts voie apparaît.
Diagnostic Voie
Défauts internes
Défauts externes
Autres défauts
Alimentation externe
OK
Remarque : L’acès aux informations de diagnostic de la voie est également
accessible par programme (instruction READ_STS).
294
35009561.01 07/2008
Diagnostic et maintenance
9
Présentation
Objet de ce
chapitre
Ce chapitre décrit les différentes fonctions de diagnostic , donne la liste des erreurs
générées par le module de commande d’axes et décrit les bits de status.
Contenu de ce
chapitre
Ce chapitre contient les sous-chapitres suivants :
35009561.01 07/2008
Souschapitre
Sujet
Page
9.1
Diagnostic de la phase SERCOS®
296
9.2
Lecture des informations courantes du bus
300
9.3
Identification de l’axe
304
9.4
Informations de défaut et d’état
305
9.5
Défauts et avertissements
315
9.6
Performances du TSX CSY 84
337
295
Diagnostic et maintenance
9.1
Diagnostic de la phase SERCOS®
Présentation
Objet de ce
sous-chapitre
Cette section décrit les fonctions de diagnostic des paramètres de la phase
SERCOS®.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
296
Sujet
Page
A propos de la norme des phases SERCOS®
297
Fonction GetActualPhase
298
Fonction GetCommandedPhase
299
35009561.01 07/2008
Diagnostic et maintenance
A propos de la norme des phases SERCOS®
Norme CEI 1491
La norme CEI 1491 (norme internationale SERCOS de protocole de communication
avec des variateurs asservis) définit les cinq phases suivantes de communication
avec un variateur SERCOS.
Phases
SERCOS®
Le tableau suivant définit les phases :
35009561.01 07/2008
Phase
Signification
0
L'anneau ne communique pas.
1
Le contrôleur recherche les variateurs présents sur l'anneau.
2
Les paramètres de synchronisation de l'anneau SERCOS sont échangés avec
les variateurs.
3
Les canaux de service avec les variateurs fonctionnent et tous les paramètres
de temporisation sont utilisés. Les fonctions GetIDN et SetIDN sont prêtes à
fonctionner.
4
Le contrôleur de mouvement envoie cycliquement des informations aux
variateurs. L'anneau est en service et les commandes de mouvement sont
autorisées.
297
Diagnostic et maintenance
Fonction GetActualPhase
Description
Cette fonction renvoie la phase SERCOS® en cours sur l'anneau.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD,
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
298
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
550
Commande
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Diagnostic et maintenance
Fonction GetCommandedPhase
Description
La fonction GetCommandedPhase renvoie la phase de la boucle SERCOS® que le
contrôleur de mouvement tente d'établir.
Note : Utilisez la fonction GetActualPhase pour déterminer la phase actuellement
établie.
La fonction SetCommandedPhase demande au contrôleur de mouvement de faire
passer l'anneau SERCOS® à la phase spécifiée.
Le changement des phases SERCOS® doit toujours s'effectuer de manière
croissante. Si la valeur de SetCommandedPhase est inférieure à la phase en cours,
le contrôleur de mouvement effectuera la commutation à la phase 0, puis il
parcourra toutes les phases séquentiellement jusqu'à la phase spécifiée. Si
l'anneau est en phase 4, et si une phase inférieure est commandée, les axes de
mouvement se trouveront en défaut.
Note : Le contrôleur de mouvement ne peut passer à la phase SERCOS®
suivante que si tous les variateurs sur l'anneau autorisent le passage à la phase
suivante. Par conséquent, il est possible que la phase commandée ne soit jamais
exécutée. Utilisez la fonction GetCommandedPhase pour savoir quelle phase a
été commandée; utilisez la fonction GetActualPhase pour connaître la phase en
cours sur l'anneau SERCOS®.
Comment utiliser
ces fonctions
Ces fonctions sont mises en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à ces fonctions.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
1545
Commande de lecture
2545
Commande d’écriture
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande de lecture
%MDxy.i.27
PARAM_CMD_1
-
Valeur à écrire)
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
299
Diagnostic et maintenance
9.2
Lecture des informations courantes du bus
Présentation
Objet de ce
sous-chapitre
Cette section décrit les fonctions de lecture des informations courantes du bus
(adresse SERCOS®, nombre de variateurs de vitesse, ...).
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
300
Sujet
Page
Fonction GetSercosAddress
301
Fonction GetNumberOfDrivesInRing
302
Fonction IsLoopUp
303
35009561.01 07/2008
Diagnostic et maintenance
Fonction GetSercosAddress
Description
Cette fonction renvoie l'adresse SERCOS® pour cet axe.
Note : Cette fonction n’existe que pour les axes réels et les axes à mesure externe.
Note : L’adresse SERCOS® d’un axe est également disponible dans le mot
constant %KWxy.i.0 de la voie correspondante.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
549
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande (1)
%MDxy.i.27
PARAM_CMD_1
-
Valeur à écrire (2)
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
Commande
Légende
(1) :Si Adresse = 25350 : aucun axe configuré à cette adresse ou adresse invalide.
(2) : Cette valeur correspond à l’index de la table des axes réels présents dans la
boucle (0 = 1er axe, 1 = 2eme axe, ...). Ce paramètre n’est pas nécessaire si la fonction
est envoyée sur la voie correspondante à l’axe dont on veut obtenir l’adresse.
35009561.01 07/2008
301
Diagnostic et maintenance
Fonction GetNumberOfDrivesInRing
Description
Cette fonction renvoie le nombre d'axes existant sur le réseau en anneau fibre
optique SERCOS®.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Echange par WRITE_CMD : Le tableau ci-dessous présente les différents objets
langage liés à cette fonction.
302
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
548
Commande
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Diagnostic et maintenance
Fonction IsLoopUp
Description
Cette fonction indique si le réseau en anneau SERCOS® (boucle SERCOS®) est
prêt à communiquer avec le contrôleur de mouvement et s'il se trouve en phase 4.
les valeurs possibles sont :
z
z
1 = (VRAI) si la boucle est en état "haut" (communication active),
0 (FAUX) si la boucle est "basse" (les communications ne sont pas établies en
phase 4).
Utilisez la fonction GetActualPhase pour déterminer la phase actuellement établie.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Le tableau ci-dessous présente les différents objets langage liés à cette fonction.
35009561.01 07/2008
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
543
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
Commande
303
Diagnostic et maintenance
9.3
Identification de l’axe
Fonction GetNumberInSet
Description
Cette fonction renvoie le nombre d’axes contenus dans un groupe, de la manière
suivante :
z Fonction SERCOS® : la fonction renvoie le nombre total d’axes réels, d’axes
imaginaires, d’axes à mesure externe, de groupes d’axes coordonnés et de
groupes d’axes suiveurs configurés dans l’application,
z Groupe d’axes coordonnés et suiveurs : la fonction renvoie le nombre d’axes
indépendants contenus dans le groupe,
z Axe réel, imaginaire et à mesure externe : la fonction renvoie la valeur 1, qui
signifie que l’axe est indépendant.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Le tableau ci-dessous présente les différents objets langage liés à cette fonction.
304
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
541
Commande
%MDxy.i.20
PARAM_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Diagnostic et maintenance
9.4
Informations de défaut et d’état
Présentation
Objet de ce
sous-chapitre
Cette section décrit les fonctions de lecture des informations de défaut et d’état.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Objets à échange implicite
35009561.01 07/2008
Page
306
Défauts accessibles par la commande GetMotionFault
307
Fonction GetMotionFault
310
Défauts accessibles par la commande GetMotionWarning
311
Fonction GetMotionWarning
314
305
Diagnostic et maintenance
Objets à échange implicite
Défaut module
Le bit %Ixy.MOD.ERR à l’état 1 indique que le module situé en position xy est en
défaut. Les causes de défaut sont répertoriées dans le mot interne %MWxy.MOD.2.
Défaut voie
Le bit %Ixy.i.ERR à l’état 1 indique que la voie i du module situé en position xy est
en défaut. Les causes de défaut sont répertoriées dans le mot interne %MWxy.i.2.
306
35009561.01 07/2008
Diagnostic et maintenance
Défauts accessibles par la commande GetMotionFault
Description
35009561.01 07/2008
Les informations DéfautMouvement indique le type d'erreur qui a provoqué un état
AXIS_SUMMARY_FAULT dans le mot EtatMouvement d'un axe. Ce type d'erreur
s'enregistre en positionnant un bit dans le mot DéfautMouvement; il s'agit d'un bit
seulement par type d'erreur. Plusieurs erreurs différentes positionnent les bits
correspondants dans le mot DéfautMouvement. Plusieurs erreurs du même type
positionnent le même bit; par conséquent, le mot DéfautMouvement n'indique pas
le nombre d'erreurs du même type. Le mot DéfautMouvement se réinitialise à zéro
au moyen de la fonction ClearFault envoyée à un axe de mouvement.
307
Diagnostic et maintenance
Défauts de
Mouvement
308
Le tableau suivant donne la liste des défauts de mouvement contenus dans la
donnée DéfautMouvement :
Nom
Bit
Description
MF_MOVE_BUT_NOT_ ENABLED
0
Une commande de mouvement a atteint
l'interpolateur mais le variateur est désactivé.
Cela doit se produire uniquement si le variateur
est désactivé pendant le début d'une
commande de mouvement.
MF_SERCOS_RATE_ TOO_FAST
3
Trop de voies sont configurées par rapport aux
temps de cycle choisi.
MF_CONTROL_ CONFLICT
10
Conflit de contrôle avec l’outil de configuration
drive.
MF_DRIVE_FAULT
13
Un défaut variateur s'est produit. Utilisez la
fonction GetIDN_S_ et GetIDN_P avec le
paramètre SERCOS® standard IDN S-0-0011
pour en déterminer la cause.
MF_REQUESTED_FAULT
15
Le bit ALLOW_NOT_FAULT de
CommandeMouvement n'est pas positionné à
1. L'axe reste en défaut jusqu'à ce que le bit
ALLOW_NOT_FAULT soit positionné à 1 et
qu'une fonction ClearFault soit envoyée.
MF_COMM_FAULT
16
L'anneau fibre optique SERCOS® a perdu la
communication avec le variateur.
MF_AXIS_LIMIT_FAULT
21
L'axe a atteint une butée logicielle positive ou
négative.
MF_PHASE3_CONFIG_ PROBLEM 23
Problème de configuration phase 3.
MF_PHASE0_SERCOS_ ERROR
24
Erreur en phase 0.
MF_PHASE1_SERCOS_ ERROR
25
Erreur en phase 1.
MF_PHASE2_SERCOS_ ERROR
26
Erreur en phase 2.
MF_PHASE3_SERCOS_ ERROR
27
Erreur en phase 3.
MF_PHASE4_SERCOS_ ERROR
28
Erreur en phase 4.
MF_MOVE_WHILE_ HALT
29
Une commande de mouvement a atteint
l'interpolateur mais le bit ALLOW_MOVE de
CommandeMouvement n'est pas positionné à
1. Ceci doit se produire uniquement si le
variateur est arrêté à l'instant précis où une
commande de mouvement débute.
35009561.01 07/2008
Diagnostic et maintenance
Défaut variateur
35009561.01 07/2008
L’information défaut variateur (MF_DRIVE_FAULT) n’est pas à prendre en compte
lorsqu’il y a également une erreur de communication SERCOS®
(MF_COMM_FAULT). En effet, le passage en phase 3 déclenche une erreur de
communication, bien que la communication soit toujours possible.
309
Diagnostic et maintenance
Fonction GetMotionFault
Description
Cette fonction renvoie les informations DéfautMouvement concernant un axe. Le
mot DéfautMouvement se réinitialise à zéro au moyen de la fonction ClearFault
envoyée à un axe.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD
(voir WRITE_CMD, p. 349).
Objets Langage
associés
Le tableau ci-dessous présente les différents objets langage liés à cette fonction.
310
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
5510
Commande
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Diagnostic et maintenance
Défauts accessibles par la commande GetMotionWarning
Description
Le contrôleur de mouvement génère des avertissements de mouvements
lorsqu'une commande de mouvement est envoyée à un MotionSet via les registres
MotionControl, et que cette commande n'est pas autorisée à cet instant. Le type de
donnée MotionWarning enregistre ces avertissements.
Les avertissements s'enregistrent en positionnant un bit dans le registre
MotionWarning ; il s'agit d'un bit seulement par type d'avertissement. Plusieurs
avertissements de types différents positionnent les bits correspondants dans le mot
MotionWarning. Plusieurs avertissements du même type positionnent le même bit;
par conséquent, le mot MotionWarning n'indique pas le nombre d'avertissements du
même type. Le mot MotionWarning se réinitialise à zéro en envoyant à l’axe une
fonction ClearFault. Utilisez la fonction GetMotionWarning pour lire les
avertissements des mouvements.
35009561.01 07/2008
311
Diagnostic et maintenance
Avertissements
de Mouvement
312
Le tableau suivant donne la liste des avertissements (ou alertes) de mouvement
contenus dans la donnée MotionWarning :
Nom
Bit Description
MW_SURV_WARNING
0
Si 2 axes ont un déplacement divergent de
plus que le seuil d’alarme, le module
déclenche un avertissement sur les 2 axes
fautifs.
MW_SURV_WARNING_PROP
1
Si 2 axes ont un déplacement divergent de
plus que le seuil de défaut, le module
déclenche un défaut sur les 2 axes fautifs,
arrête tous les axes de la liste et déclenche
un avertissement
(MW_SURV_WARNING_PROP) sur les
axes non fautifs.
MW_STOP_BY_SET
2
Défaut sur axe lié. (Les axes s’étant
arrêtés suite à la propagation des défauts
seront signalés en avertissement).
MW_MERGE_UNLINK
7
Abandon du mouvement à la désactivation
de suivi.
MW_AXIS_NOT_HOMED
6
Inutilisé.
MW_AXIS_TRAVEL_LIMIT
13
L'axe a atteint un contact de proximité ou la
position cible en dehors de la plage de
déplacement. Copie de l'IDN 12 du
variateur Lexium 15. Pour revalider un
mouvement, il doit d'abord être acquitté.
MW_AXIS_IS_LINKED
17
La commande de mouvement ne s'est pas
effectuée parce que l'axe de mouvement
est un membre d’un CoordinatedGroup ou
d'un SlaveGroup.
MW_AXIS_POS_LIMIT
21
L'axe a dépassé sa limite positive de
position.
MW_AXIS_NEG_LIMIT
22
L'axe a dépassé sa limite négative de
position.
MW_SIMULTANEOUS_MANUAL_CMDS 24
Commandes manuelles simultanées
MW_AXIS_MANUAL_MODE
25
Inutilisé.
MW_STOP_TO_MANUAL_MODE
26
Le mode manuel a été activé pendant le
déplacement de l'axe.
MW_NOTALLOWED_AT_THIS_TIME
31
Commande doManualCmd non
disponible : L'axe n'est pas prêt pour la
commande manuelle.
35009561.01 07/2008
Diagnostic et maintenance
Cas d’un Groupe
Coordonné
35009561.01 07/2008
Le tableau suivant donne la liste des avertissements (ou alertes) de mouvement
contenus dans la donnée MotionWarning pour un CoordinatedGroup :
Nom
Bit
Description
MW_AXIS_IS_MOVING
3
La commande de mouvement ne s'est pas effectuée
parce que l'axe était en mouvement.
MW_MEMBER_WARNING
4
Avertissement sur un membre. (Les groupes validés
ou non, comportant un axe en avertissement seront
signalés en avertissement).
MW_MEMBER_FAULT
5
Défaut sur un membre. (Les groupes non validés
comportant un axe en défaut seront signalés en
avertissement).
MW_CANNOT_ ENABLE
10
La validation est refusée par le variateur.
MW_LINK_TARGET_MISSED
11
Groupes seulement : Fonction DynamicLink (576).
Erreur de position d'écart entre SETPOINT et la
position effectivement atteinte par les axes maître et
esclaves.
MW_ACQUIRE_ DISALLOWED 18
Le CoordinatedGroup ou le SlaveGroup n'a pas pu
activer la commande d'acquisition de ses membres
du fait qu'un ou plusieurs membres de l'axe de
mouvement sont déjà membres d'un
CoordinatedGroup ou d'un SlaveGroup.
313
Diagnostic et maintenance
Fonction GetMotionWarning
Description
Cette fonction renvoie les bits AvertissementMouvement concernant un axe de
mouvement.
Ces bits signalent les avertissements; il sont précédés du préfixe MW_.
Comment utiliser
cette fonction
Cette fonction est mise en oeuvre à l’aide de l’instruction WRITE_CMD (voir
WRITE_CMD, p. 349).
Objets Langage
associés
Le tableau ci-dessous présente les différents objets langage liés à cette fonction.
314
Objet
Nom
Code fonction Description
%MWxy.i.26
ACTION_CMD
5511
Commande
%MDxy.i.20
RETURN_CMD_1
-
Résultat de la commande
%MWxy.i.19
ERROR_CMD
-
Compte rendu d’erreur. Voir
Commande WRITE_CMD : Erreurs
de programmation, p. 325.
35009561.01 07/2008
Diagnostic et maintenance
9.5
Défauts et avertissements
Présentation
Titre de ce
sous-chapitre
Cette section donne la liste des défauts et des avertissements accessibles par la
lecture explicite.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Défauts module accessibles par lecture explicite
316
Défauts voie accessibles par lecture explicite
317
Liste d’erreurs de configuration et de réglage
318
Registres en défauts
320
Liste des codes d’erreur d’une commande WRITE_CMD
324
Commande WRITE_CMD : Erreurs de programmation
325
Commande WRITE_CMD : Erreurs de communication
327
Commande WRITE_CMD : Erreurs système
328
Commande WRITE_CMD : Avertissements système
330
Défauts d’écriture explicite d’une commande TRF_RECIPE
331
Modes de marche
332
Logigrammes des défauts
333
Défauts variateur
335
315
Diagnostic et maintenance
Défauts module accessibles par lecture explicite
Introduction
Le mot %MWxy.MOD.2 signale un défaut éventuel du module situé en position xy.
Liste des défauts
Les bits %MWxy.MOD.2:X0 à %MWxy.MOD.2:X15 permettent de diagnostiquer les
défauts du module :
316
Bit
Signification
0
Défaut interne : module hors service
1
Défaut fonctionnel : défaut externe, défaut de communication ou défaut
applicatif (se reporter au mot d’état de la voie %MWxy.i.2)
2
Défaut bornier
3
Module en auto-tests
4
Réservé
5
Défaut de configuration : configuration matérielle et logicielle différente
6
Module absent ou hors tension
7 à 15
Réservé
35009561.01 07/2008
Diagnostic et maintenance
Défauts voie accessibles par lecture explicite
Introduction
Le mot %MWxy.i.2 signale un défaut éventuel de la voie i du module situé en
position xy.
Liste des défauts
Les bits %MWxy.i.2:X0 à %MWxy.i.2:X15 permettent de diagnostiquer les défauts
de la voie :
35009561.01 07/2008
Bit
Signification
0
Défaut externe 0 : défaut du variateur de vitesse
1
Défaut externe 1 : défaut de communication avec l’axe
2
Réservé
3
Défaut externe 2
4
Défaut interne
5
Défaut de configuration : configuration matérielle et logicielle différente
6
Défaut de communication
7
Défaut application : défaut de configuration, réglage ou commande
8
Défaut ventilateur (voie 0 uniquement)
9
Surtempérature (voie 0 uniquement)
10
Défaut capteur de température (voie 0 uniquement)
11
Création d’objet mouvement en cours
12
Défaut de configuration (sauf voie 0)
13
Réservé
14
Etat du voyant de voie : fixe
15
Etat du voyant de voie : clignotant
317
Diagnostic et maintenance
Liste d’erreurs de configuration et de réglage
Introduction
Le mot %IWxy.i.2 signale un défaut éventuel de programmation.
z
z
Liste de défaut
318
l’octet de poids faible (LSB) contient le code de retour du type d’erreur,
l’octet de poids fort (MSB) contient l’adresse dans les registres du champ ayant
provoqué l’erreur.
Le tableau suivant donne le contenu du LSB (code d’erreur, en hexadécimal), le
nom et la description du défaut :
Code d’erreur
Description
1
Tentative d'affectation d'une valeur hors limites
2
Tentative d'affectation d'unités incompatibles
3
Unité non prise en charge ou inconnue
4
Défaut du variateur pendant le chargement
5
Défaut du variateur pendant le déchargement
6
Pointeur vide inattendu vers un objet
7
Echec de définition des unités dans le variateur
8
Unités non définies
9
Chaîne trop grande pour ChaîneMouvement
A
Index incorrect dans un groupe
B
Valeur incorrecte dans une commande
C
Valeur incorrecte dans une suite
D
Jeton incorrect en entrée
E
Voie de retour incorrecte pour une commande
F
Périphérique de retour incorrect pour une commande
10
Fréquence d'horloge de retour incorrecte
11
Alimentation de retour incorrecte
12
Résolution de retour incorrecte
13
Adresse de registre de maintien incorrecte
14
Base de données des registres de maintien non configurée
15
Base de données des registres de maintien vide
16
Bloc du registre de maintien trop grand
17
Bloc du registre de maintien ne correspond pas à la base de données
18
Impossible d'autoriser l'accès au bloc des registres de maintien
19
Impossible de libérer l'accès au bloc des registres de maintien
35009561.01 07/2008
Diagnostic et maintenance
35009561.01 07/2008
Code d’erreur
Description
1A
Echec d'ouverture d'un fichier
1B
Echec d'écriture dans un fichier
1C
Echec de lecture d'un fichier
1D
Echec de fermeture d'un fichier
1E
Echec de recherche d'un fichier
1F
Erreur de mise en forme d'une entrée
20
La fonction d'effacement des défauts a échoué
21
Tag manquant dans tags.cfg
22
Aucun objet axe n'est disponible
23
La configuration comporte trop d'axes
24
La configuration comporte des axes en double
25
Axe incorrect ou manquant
26
L'objet axe ou le fichier de configuration sont introuvables
27
La valeur comporte un nombre de coordonnées différent de celui de l'axe
28
L'axe de mouvement n'est pas activé
29
Une erreur de mouvement s'est produite sur le contrôleur de mouvement
2A
Le variateur n'est pas activé
2B
Dépassement du temps imparti pour une commande
2C
Il est possible de configurer un seul bus SERCOS®
2D
Echec de changement du nom de l'axe
2E
Impossible d'exécuter cette commande dans la configuration actuelle
2F
Le type de l'objet est incorrect
30
Le variateur doit être désactivé pour exécuter la commande
31
Le variateur doit être activé pour exécuter la commande
32
Commande non autorisée à cet instant
33
Impossible d'exécuter la commande du fait d'un défaut du variateur
319
Diagnostic et maintenance
Registres en défauts
Registre en
défaut dans le
cas de la voie
SERCOS®
Registre en
défaut dans le
cas d'un axe
indépendant
320
Le tableau suivant donne le contenu du MSB (code d'erreur, en hexadécimal) et le
registre en défaut, dans le cas de la voie 0 :
Code d'erreur
Registre
0
REG_VERSION_AXE
1
REG_ID_AXE
2
REG_BITS_CONFIGURATION
3
REG_NOMBRE_AXES
4
REG_TEMPS_CYCLE
5
REG_DEBIT
6
REG_PUISSANCE_OPTIQUE
7
REG_MEMBRE_S1
Le tableau suivant donne le contenu du MSB (code d'erreur, en hexadécimal) et le
registre en défaut, dans le cas d'un axe indépendant :
Code d'erreur
Registre
0
REG_VERSION_AXE
1
REG_ID_AXE
2
REG_BITS_CONFIGURATION
3
REG_ADRESSE_SERCOS
4
REG_ACCELERATION
6
REG_DECELERATION
8
REG_TYPE_ACCELERATION
9
REG_FENETRE_AU_POINT
B
REG_FENETRE_DE_CONTROLE
D
REG_MODULO_MAX
F
REG_MODULO_MIN
11
REG_ACCELERATION_MAX
13
REG_DECELERATION_MAX
15
REG_VITESSE_MAX
17
REG_POSITION_MAX
19
REG_POSITION_MIN
1B
REG_NUMERATEUR_FACTEUR_ECHELLE
35009561.01 07/2008
Diagnostic et maintenance
Code d'erreur
Registre en
défaut dans le
cas d'un groupe
d'axes
coordonnés
35009561.01 07/2008
Registre
1D
REG_DENOMINATEUR_FACTEUR_ECHELLE
1F
REG_UNITES_ACCELERATION
20
REG_UNITES_VITESSE
21
REG_UNITES_POSITION
22
REG_RETOUR_RA
Le tableau suivant donne le contenu du MSB (code d'erreur, en hexadécimal) et le
registre en défaut, dans le cas d'un groupe d'axes coordonnés :
Code d'erreur
Registre
0
REG_VERSION_AXE
1
REG_ID_AXE
2
REG_BITS_CONFIGURATION
3
REG_NOMBRE_MEMBRES
4
REG_MEMBRE_C1
5
REG_MEMBRE_C2
6
REG_MEMBRE_C3
7
REG_MEMBRE_C4
8
REG_MEMBRE_C5
9
REG_MEMBRE_C6
A
REG_MEMBRE_C7
B
REG_MEMBRE_C8
C
REG_ACCELERATION
E
REG_DECELERATION
10
REG_TYPE_ACCELERATION
11
REG_ACCELERATION_MAX
13
REG_DECELERATION_MAX
15
REG_VITESSE_MAX
17
REG_UNITES_ACCELERATION
18
REG_UNITES_VITESSE
321
Diagnostic et maintenance
Registre en
défaut dans le
cas d'un groupe
d'axes suiveurs
322
Le tableau suivant donne le contenu du MSB (code d'erreur, en hexadécimal) et le
registre en défaut, dans le cas d'un groupe d'axes suiveurs :
Code d'erreur
Registre
0
REG_VERSION_AXE
1
REG_ID_AXE
2
REG_BITS_CONFIGURATION
3
REG_NOMBRE_MEMBRES
4
REG_ID_MAITRE
5
REG_MEMBRE_S1
6
REG_MODE_SUIVEUR_S1
7
REG_CAME_OU_NUMERATEUR_S1
9
REG_OFFSET_OU_DENOMINATEUR_S1
B
REG_TRIGGER_S1
D
REG_MEMBRE_S2
E
REG_MODE_SUIVEUR_S2
F
REG_CAME_OU_NUMERATEUR_S2
11
REG_OFFSET_OU_DENOMINATEUR_S2
13
REG_TRIGGER_S2
15
REG_MEMBRE_S3
16
REG_MODE_SUIVEUR_S3
17
REG_CAME_OU_NUMERATEUR_S3
19
REG_OFFSET_OU_DENOMINATEUR_S3
1B
REG_TRIGGER_S3
1D
REG_MEMBRE_S4
1E
REG_MODE_SUIVEUR_S4
1F
REG_CAME_OU_NUMERATEUR_S4
21
REG_OFFSET_OU_DENOMINATEUR_S4
23
REG_TRIGGER_S4
25
REG_MEMBRE_S5
26
REG_MODE_SUIVEUR_S5
28
REG_CAME_OU_NUMERATEUR_S5
2A
REG_OFFSET_OU_DENOMINATEUR_S5
2C
REG_TRIGGER_S5
2E
REG_MEMBRE_S6
2F
REG_MODE_SUIVEUR_S6
35009561.01 07/2008
Diagnostic et maintenance
35009561.01 07/2008
Code d'erreur
Registre
30
REG_CAME_OU_NUMERATEUR_S6
32
REG_OFFSET_OU_DENOMINATEUR_S6
34
REG_TRIGGER_S6
36
REG_MEMBRE_S7
37
REG_MODE_SUIVEUR_S7
38
REG_CAME_OU_NUMERATEUR_S7
3A
REG_OFFSET_OU_DENOMINATEUR_S7
3C
REG_TRIGGER_S7
3E
REG_MEMBRE_S8
3F
REG_MODE_SUIVEUR_S8
40
REG_CAME_OU_NUMERATEUR_S8
42
REG_OFFSET_OU_DENOMINATEUR_S8
44
REG_TRIGGER_S8
323
Diagnostic et maintenance
Liste des codes d’erreur d’une commande WRITE_CMD
Introduction
Le mot %MWxy.i.19 signale un défaut éventuel lors de l’écriture explicite d’une
commande WRITE_CMD.
Les défauts générés par le module de commande d’axes sont de 3 types :
les erreurs de programmation (voir Commande WRITE_CMD : Erreurs de
programmation, p. 325),
z les erreurs de communication (voir Commande WRITE_CMD : Erreurs de
communication, p. 327),
z les erreurs système (voir Commande WRITE_CMD : Erreurs système, p. 328).
z
324
35009561.01 07/2008
Diagnostic et maintenance
Commande WRITE_CMD : Erreurs de programmation
Liste des erreurs
de
programmation
35009561.01 07/2008
Le tableau suivant donne le code d’erreur, le nom et la description des erreurs de
programmation. Les codes d’erreur 1 à 999 sont réservés pour ce type d’erreur.
Code d’erreur
Description
1
Tentative d'affectation d'une valeur hors limites
2
Tentative d'affectation d'unités incompatibles
3
Unité non prise en charge ou inconnue
4
Défaut du variateur pendant le téléchargement aval
5
Défaut du variateur pendant le téléchargement amont
6
Pointeur vide inattendu vers un objet
7
Echec de définition des unités dans le variateur
8
Unités non définies
9
Chaîne trop grande pour ChaîneMouvement
10
Index incorrect dans un ensemble collecté
11
Valeur incorrecte dans une commande
12
Valeur incorrecte dans une suite
13
Jeton incorrect en entrée
14
Voie de retour incorrecte pour une commande
15
Périphérique de retour incorrect pour une commande
16
Fréquence d'horloge de retour incorrecte
17
Alimentation de retour incorrecte
18
Résolution de retour incorrecte
19
Adresse de registre de maintien incorrecte
20
Base de données des registres de maintien non configurée
24
Impossible d'autoriser l'accès au bloc des registres de maintien
25
Impossible de libérer l'accès au bloc des registres de maintien
26
Echec d'ouverture d'un fichier
27
Echec d'écriture dans un fichier
28
Echec de lecture d'un fichier
29
Echec de fermeture d'un fichier
30
Echec de recherche d'un fichier
31
Erreur de mise en forme d'une entrée
32
La fonction d'effacement des défauts a échoué
33
Tag manquant dans tags.cfg
325
Diagnostic et maintenance
Code d’erreur
326
Description
34
Aucun objet axe n'est disponible
35
La configuration comporte trop d'axes
36
La configuration comporte des axes en double
37
Axe incorrect ou manquant
38
L'objet axe ou le fichier de configuration sont introuvables
39
La valeur comporte un nombre de coordonnées différent de celui de l'axe
40
L'axe de mouvement n'est pas activé
41
Une erreur de mouvement s'est produite sur le contrôleur de mouvement
42
Le variateur n'est pas activé
43
Dépassement du temps imparti pour une commande
44
Il est possible de configurer un seul bus SERCOS®
45
Echec de changement du nom de l'axe
46
Impossible d'exécuter cette commande dans la configuration actuelle
47
Le type de l'objet est incorrect
48
Le variateur doit être désactivé pour exécuter la commande
49
Le variateur doit être activé pour exécuter la commande
50
Commande non autorisée à cet instant
51
Impossible d'exécuter la commande du fait d'un défaut du variateur
60
Mode manuel refusé sur axe lié à un groupe coordonné ou suiveur
61
Commande Auto refusée sur un axe en mode manuel
62
Groupe suiveur ayant des esclaves en profils de came
63
La décélération pour un esclave ou pour le maître est supérieure à la
décélération max donnée en configuration
64
Refus du TRF_ RECIPE 26200: l’instance est déjà active
65
Refus du TRF_ RECIPE 26200 : le seuil d’alarme est supérieur au seuil
de défaut
66
Refus du TRF_ RECIPE 26200 : un des seuils est négatif
67
Refus du TRF_ RECIPE 26200 : un des dénominateur est nul
68
Refus du TRF_ RECIPE 16200 : l’instance n’est pas active
35009561.01 07/2008
Diagnostic et maintenance
Commande WRITE_CMD : Erreurs de communication
Liste des erreurs
de
communication
35009561.01 07/2008
Le tableau suivant donne le code d'erreur, le nom et la description des erreurs de
communication. Les codes d'erreur 1000 à 1999 sont réservés pour ce type d'erreur.
Code d'Erreur Description
1000
Pas de réponse de la cible
1001
Communications brouillées
1002
Erreur SERCOS®
1003
Pas d'écho du code opérateur (opcode) en provenance du variateur
1004
L'anneau SERCOS® n'est pas prêt
1005
Erreur SERCOS®
1006
Echec de lecture SERCOS® (voie cyclique)
327
Diagnostic et maintenance
Commande WRITE_CMD : Erreurs système
Liste des erreurs
système
Le tableau suivant donne le code d'erreur, le nom et la description des erreurs
système. Les codes d'erreur 2000 à 2999 sont réservés pour ce type d'erreur.
Code d'Erreur Description
328
2000
Erreur inconnue
2001
Erreur dans les composants
2002
Erreur dans les composants
2003
Défaut système pendant la mise au point
2004
Le variateur a reçu un défaut Commande non autorisée
2005
Le variateur a reçu un défaut de commande illégale
2006
Le variateur a reçu un défaut d'erreur de programmation
2007
Identificateur de commande incorrect
2008
Echec de liaison d'un objet à l'interface du variateur
2009
Echec de création d'un sémaphore
2010
Echec de suppression d'un sémaphore
2011
Echec de verrouillage d'un sémaphore
2012
Echec de déverrouillage d'un sémaphore
2013
Echec de requête d'un sémaphore
2014
L'axe de mouvement n'a jamais été configuré correctement.
2015
Commande pas encore implémentée
2016
Echec scx_unique
2017
Echec de création d'une file d'attente
2018
La file d'attente est pleine
2019
Identificateur de file d'attente incorrect
2020
Etat inconnu de la file d'attente
2021
Echec de requête d'une file d'attente
2022
Echec de création d'un groupe d'événements
2023
Erreur de mise en attente d'un groupe d'événements
2024
Erreur d'effacement d'un groupe d'événements
2025
Echec de création d'indicateurs d'événements
2026
Echec de recherche d'un objet
2027
Gestionnaire d'objets introuvable
2028
Etat organisateur de mouvements incorrect
2029
Echec d'allocation de la mémoire
35009561.01 07/2008
Diagnostic et maintenance
Code d'Erreur Description
35009561.01 07/2008
2030
Une erreur s'est produite lors de l'obtention de l'identificateur de tâche à
partir du système d'exploitation
2031
Tentative d'installation de trop de gestionnaires d'erreurs
2032
Echec de création d'un thread
2033
Echec de suppression d'un thread
2034
Un problème de configuration d'un thread s'est produit
2035
Une erreur s'est produite lors d'une tentative de pause d'un thread
2036
Une erreur s'est produite lors d'une tentative de reprise d'un thread
2037
Une erreur s'est produite lors de la création d'un objet
4000
Défaut intensité efficace
4001
Surchauffe du variateur
4002
Surchauffe du variateur
4005
Défaut de retour du résolveur ou du codeur
4006
Défaut général sur le variateur (erreur de phase)
4007
Défaut de court-circuit du variateur
4009
Défaut de tension du variateur
4011
Défaut de suivi
4012
Le variateur a détecté un défaut de communication
4013
Défaut matériel de fin de course
4015
Défaut d'origine, de sortie numérique ou de conflit de commande (à partir
de 2 sources)
4016
Le maître SERCOS® a détecté un défaut de communication
5001
La surveillance du chien de garde a expiré; tous les axes sont inhibés
329
Diagnostic et maintenance
Commande WRITE_CMD : Avertissements système
Liste des
avertissements
système
330
Le tableau suivant donne le code d'erreur, le nom et la description des
avertissements système.
Code d'Erreur Description
7001
Le programme ne reconnaît pas ce numéro de sous-programme
7002
L'identification de l'axe est incorrecte pour ce sous-programme
7003
Les données sont en dehors des limites
7004
Erreur de protocole SousNum/SousNumEcho
7005
Le sous-programme ne s'exécute pas dans le temps imparti
7010
Le programme ne reconnaît pas ce numéro de sous-programme
7777
Un appel au sous-programme Exemple_Utilisateur a eu lieu
35009561.01 07/2008
Diagnostic et maintenance
Défauts d’écriture explicite d’une commande TRF_RECIPE
Introduction
Le mot %MWxy.i.3 signale un défaut éventuel lors de l’écriture explicite d’une
commande TRF_RECIPE.
Les défauts générés sont les mêmes que ceux de l’écriture explicite d’une
commande WRITE_CMD (se reporter aux pages précédentes), complétés par
quelques défauts spécifiques à la commande TRF_RECIPE.
Liste des erreurs
spécifiques à la
commande
TRF_RECIPE
35009561.01 07/2008
Le tableau suivant donne le code d’erreur, le nom et la description des erreurs
spécifiques à la commande TRF_RECIPE :
Code d’erreur
Description
6
Le profil de came est configuré en fixe et non en variable. La lecture ou
l’écriture d’une table de profil de came est impossible.
19
Le transfert demandé dépasse la capacité des %MW ou %KW de
l’automate.
22
La table associée au TRF_RECIPE n’est pas suffisante pour les
informations à échanger.
331
Diagnostic et maintenance
Modes de marche
Synoptique des
modes de
marche
Les modes de marche des modules TSX CSY 84/164 sont les suivants :
RESET par bouton
poussoir à pointe de
crayon
Mise
sous tension
Autotests de la
carte PC intégrée
au module
(durée 20 à 30 s)
VoyantsEtat
ERRclignotant
INIclignotant
Autreséteints
Autotests
Autotests du
module
(durée 2 à 3 s)
VoyantsEtat
Tousclignotant
Démarrage
Initialisation du
firmware
(durée 5 à 20 s)
VoyantsEtat
ERRclignotant
INIclignotant
Autreséteints
Module prêt à
recevoir une
configuration
VoyantsEtat
ERRclignotant
Autreséteints
Module en
communication
avec le processeur
VoyantsEtat
RUNallumé
INIéteint
I/Oéteint
SER(1)clignotant éteint
ERRéteint
Incorrect
Initialisation
Incorrect
Incorrect
Incorrect
Incorrect
Défaut grave
VoyantsEtat
ERRallumé
Autresnon
significatif
332
Prêt
Configuré
(1)clignotant en fonctionnement normal, sinon
éteint
(2)allumé:voie en fonctionnement
éteint:voie non configurée
clignotant:voie en défaut
1 à 24(2)allumé
clignotant éteint
35009561.01 07/2008
Diagnostic et maintenance
Logigrammes des défauts
Génération de
défauts
Le logigramme suivant illustre la génération des défauts AXIS_SUMMARY_FAULT
et externe :
Drive existant
Conf_Drive_OK
Conf_PL7_OK
&
OK_CONF_DRIVE
COMM_PHASE4
AXIS_COMM_OK
&
Défaut Externe
EXT_FAULT1
MF_DRIVE_FAULT
EXT_FAULT0
AXIS_COMM_OK
MF_DRIVE_FAULT
MF_MOVE_BUT_NOT_ENABLED
MF_REQUESTED_FAULT
MF_COMM_FAULT
>
AXIS_SUMMARY_FAULT
MF_AXIS_LIMIT_FAULT
MF_MOVE_WHILE_HALT
WATCHDOG_FAULT
SERCOS_RATE_TOO_FAST
35009561.01 07/2008
333
Diagnostic et maintenance
Activation des
voyants
Le logigramme suivant illustre l’activation des voyants I/O et CH :
I/O
Défaut externe
Drive_Warning
CH
&
Configuration_OK
>
&
CH
Voyant allumé
Voyant clignotant
334
35009561.01 07/2008
Diagnostic et maintenance
Défauts variateur
Introduction
Certaines fonctions permettent de remonter à l’application des informations de
défaut.
Ces fonctions sont :
z
z
z
GET_IDN pour IDN_11,
GET_IDN pour IDN_12,
GET_IDN pour IDN_13.
Note : Pour plus d’informations sur les fonctions GET_IDN, Voir (Fonctions de
lecture/écriture des IDN SERCOS®, p. 265).
Défaults "IDN11"
35009561.01 07/2008
Les défauts ci-dessous résultent de l’exécution de la fonction GET_IDN pour
IDN_11.
Bit
Description
0
Arrêt dû à une surcharge (IDN 114)
1
Températur d’arrêt de l’amplificateur (IDN 203)
2
Températur d’arrêt du moteur (IDN 204)
3
Arrêt dû à un refroidissement défectueux (IDN 205)
4
Erreur de tension de commande
5
Erreur de retour
6
Erreur dans le système de communication
7
Erreur de surintensité
8
Erreur de surtension
9
Erreur de sous-tension
10
Erreur de phase d’alimentation électrique
11
Ecart de position excessif (IDN 159)
12
Erreur de transmission (IDN 14)
13
Dépassement de limite des butées (IDN 49 et 50)
14
Réservé
15
Erreur spécifique au fabricant (IDN 129)
335
Diagnostic et maintenance
Défaults "IDN12"
Défaults "IDN13"
336
Les défauts ci-dessous résultent de l’exécution de la fonction GET_IDN pour
IDN_12.
Bit
Description
0
Alarme de surcharge (IDN 314)
1
Alarme de surchauffe de l’amplificateur (IDN 311)
2
Alarme de surchauffe du moteur (IDN 312)
3
Alarme dû à un refroidissement défectueux (IDN 313)
4 à 14
Réservé
15
Alarme spécifique au fabricant (IDN 129)
Les défauts ci-dessous résultent de l’exécution de la fonction GET_IDN pour
IDN_13.
Bit
Description
0
Etat N retour = N commande (IDN 330)
1
Etat de [valeur absolue de N retour] = 0 (IDN 331)
2
Etat N retour < [valeur absolue de Nx] (IDN 332)
3
Etat de [valeur absolue de T] >= [valeur absolue de Tx] (IDN 333)
4
Etat de [valeur absolue de T] >= [valeur absolue de T limite] (IDN 334)
5
Etat de [valeur absolue de N commande] >= [valeur absolue de N limite] (IDN
335)
6
Etat en position (IDN 336)
7
Etat de [valeur absolue de P] <= [valeur absolue de Px] (IDN 337)
8
Réservé
9
Etat de [valeur absolue de N réel] >= viteese maximale de broche (IDN 339)
10
Etat de [valeur absolue de N réel] >= viteese maximale de broche (IDN 340)
11 à 14
Réservé
15
Alarme spécifique au fabricant (IDN 129)
35009561.01 07/2008
Diagnostic et maintenance
9.6
Performances du TSX CSY 84
Performances du TSX CSY 84
Présentation
Les performances du module sont :
z
z
z
z
z
z
temps de cycle SERCOS® :
z Tic SERCOS® égale à 4 ms par défaut.
traitement d’une commande immédiate = 2 Tic SERCOS®,
traitement d’une commande en file = 2 Tic SERCOS® * Nombre commande en
file,
traitement de la mesure Remote = 2 Tic Sercos + 1 Tic SERCOS® pour la prise
en compte de la commande de référence sur l’esclave,
période de la surveillance des écarts entre axes : 20 ms indépendant du Tic,
modification à la volée du temps de cycle via la commande Write-cycle au choix :
z Tic SERCOS® à 2 ms,
z Tic SERCOS® à 3 ms,
z Tic SERCOS® à 4 ms,
avec prise en compte lors du forçage en phase 0 de l’anneau SERCOS®.
Le Tic SERCOS® est définit en fonction du nombre d’axes configurés et du type
d’applications (Voir Guide de choix du temps de cycle SERCOS®).
Note : le Lexium réalise une interpolation toutes les 250 μs.
Guide de choix du temps de cycle SERCOS® :
Performances du TSX CSY 84
Temps de cycle SERCOS® (ms)
4.5
4
3.5
3
Axes indépendants
Axes coordonnés
Axes suiveurs
2.5
2
1.5
1
0.5
0
1
2
3
4
5
6
7
8
Nombre d’axes
Conditions de test :
35009561.01 07/2008
337
Diagnostic et maintenance
Attention : les performances annoncées sont réalisées sous certaines conditions
en garantissant une réserve de temps de l’ordre de 25% du temps CPU SERCOS®.
La Période de la tâche MAST est configurée à 20ms. L’envoi des commandes de
mouvements via MOVE_QUEUE est réalisée une fois tous les 10 cycles automates.
En conséquence,
z
z
z
pour la configuration "axes indépendants" : on envoie un MOVE_QUEUE à tous
les axes toutes les 200ms,
pour la configuration "axes suiveurs", on envoie un MOVE_QUEUE au maître
toutes les 200ms,
pour la configuration "axes coordonnés" on envoie un MOVE_QUEUE à tous les
groupes coordonnés toutes les 200ms.
Un WRITE_PARAM est envoyé durant ce laps de temps, afin d’effectuer un réglage
d’un paramètre.
Modification par
programme du
temps de cycle
(* changement du tps de cycle SERCOS® => %MW30 = 2000 ou 3000
ou 4000 *)
IF %M30 THEN %MW101.0.26:=2565;
%MD101.0.27:=%MW30;
IF NOT %MW101.0:X1 THEN
WRITE_CMD %CH101.0;
RESET %M30;
SET %M31;
END_IF;
END_IF;
(* passage en phase SERCOS® 0 *)
IF %M31 THEN %MW101.0.26:=2545;
%MD101.0.27:=0;
IF NOT %MW101.0:X1 THEN
WRITE_CMD %CH101.0;
RESET %M31;
SET %M32;
END_IF;
END_IF;
(* Repassage en phase SERCOS® 4 *)
IF %M32 THEN %MW101.0.26:=2545;
%MD101.0.27:=4;
338
35009561.01 07/2008
Diagnostic et maintenance
IF NOT %MW101.0:X1 THEN
WRITE_CMD %CH101.0;
RESET %M32;
END_IF;
END_IF;
(* ici on peut attendre le passage en phase 4 (OPCODE 550
résultat dans %MD101.0.20) puis acquitter le defaut induit par
le passage en phase 0 *)
35009561.01 07/2008
339
Diagnostic et maintenance
340
35009561.01 07/2008
Interface langage
10
Présentation
Objet de ce
chapitre
Ce chapitre décrit les services accessibles au travers de l’interface PL7 et fournit la
liste des variables des modules TSX CSY 84 / 164.
Contenu de ce
chapitre
Ce chapitre contient les sous-chapitres suivants :
35009561.01 07/2008
Souschapitre
Sujet
Page
10.1
Interface PL7
342
10.2
Liste des variables
355
341
Interface langage
10.1
Interface PL7
Présentation
Objet de ce
sous-chapitre
Ce chapitre décrit les services accessibles au travers de l’interface PL7 :
READ_PARAM, WRITE_PARAM, SAVE_PARAM, RESTORE_PARAM,
WRITE_CMD, TRF_RECIPE, ...
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
342
Sujet
Page
Interface langage
343
Gestion des paramètres
345
WRITE_PARAM et READ_PARAM
347
SAVE_PARAM et RESTORE_PARAM
348
WRITE_CMD
349
WRITE_CMD Exemples
351
READ_STS
353
TRF_RECIPE et MOD_PARAM
354
35009561.01 07/2008
Interface langage
Interface langage
Voies du module
Les modules TSX CSY 84 / 164 comprenent jusqu’à 32 voies qui supportent les
fonctions suivantes :
Voies
35009561.01 07/2008
Fonction supportée
%CHxy.0
Fonction SERCOS®
%CHxy.1 à %CHxy.8
Axes réels
%CHxy.9 à %CHxy.12
Axes imaginaires
%CHxy.13 à %CHxy.16
Axes à mesure externe
%CHxy.17 à %CHxy.20
Groupes d’axes coordonnés
%CHxy.21 à %CHxy.24
Groupes d’axes suiveurs
%CHxy.25 à %CHxy.31
Profils de came
343
Interface langage
Synoptique des
échanges
Les échanges entre le processeur, le module de commande d’axes et les variateurs
de vitesse s’effectuent de la manière suivante :
Processeur
WRITE_PARAM
Module
TSX CSY 84 / 164
Variateur de
vitesse
READ_PARAM
WRITE_CMD (Get / Set)
Paramètres de réglage
WRITE_CMD (GetIDN / SetIDN)
TRF_RECIPE
SAVE_PARAM
RESTORE_PARAM
Sauvegarde
WRITE_CMD (Move,...)
Programme PL7
Echanges implicites
%I, %IW
Echanges implicites
%Q, %QW
Mots d’état %MW
344
READ_STS
35009561.01 07/2008
Interface langage
Gestion des paramètres
Généralités
Les paramètres du module de commande d’axes et ceux des variateurs de vitesse
sont gérés séparément, au travers de PL7 et UniLink. Il est possible par exemple,
de définir des valeurs différentes pour les limites dans le module de commande
d’axes et dans les variateurs de vitesse.
Les paramètres du module de commande d’axes peuvent être classés en 2
catégories :
z les paramètres utilisés seulement par le module de commande d’axes,
z les paramètres utilisés à la fois par le module de commande d’axes et par les
variateurs de vitesse.
Note : les variateurs travaillant avec un type d’unité linéaire ne sont pas supportés
par les modules TSX CSY 84 / 164.
Paramètres du
module de
commande
d’axes
Les paramètres de type "C" (Controller) sont échangés en flottant, dans les unités
du module de commande d’axes. Ces paramètres sont relatifs au calcul de
trajectoire ou aux profils de came. Il sont configurés dans les écrans de
configuration PL7, puis modifiés par l’application au fur et à mesure de ses besoins.
Les unités de ces paramètres sont celles du module de commande d’axes, définies
dans les écrans de configuration.
Paramètres des
variateurs de
vitesse
Lorsque l’application modifie un paramètre dans le module de commande d’axes, le
paramètre relatif dans les variateurs de vitesse n’est pas mis à jour (par exemple,
les limites de position minimale et maximale, les accélérations minimale et
maximale, la vitesse maximale, la fenêtre au point).
Ces paramètres sont considérés comme des paramètres système des variateurs de
vitesse. L’utilisateur les configure à travers UniLink afin de protéger la partie
opérative et il n’est pas nécessaire de les changer en fonctionnement (le
programme application modifie les paramètres de type "C" équivalent dans le
module de commande d’axes).
35009561.01 07/2008
345
Interface langage
Paramètres
utilisés par le
module de
commande
d’axes et par les
variateurs
Le module de commande d’axes ne met pas à jour les paramètres des variateurs
de vitesse, en fonction de ces valeurs de paramètres équivalents.
Les paramètres de type "S" (identificateurs (IDN) SERCOS® Standard) et les
paramètres de type "P" (Identificateurs (IDN) SERCOS® Propriétaire) sont
échangés en flottant avec le module de commande d’axes et en entier avec les
variateurs de vitesse (par exemple, les valeurs d’accélération, de vitesse et de
position).
Si l’application nécessite de synchroniser la valeur des paramètres du module de
commande d’axes avec ceux des variateurs de vitesse, elle peut lire les paramètres
de type "S" ou de type "P" (TRF_RECIPE) puis les écrire dans les paramètres de
type "C" (WRITE_PARAM).
Paramètres
"Unités"
Les unités sont des paramètres utilisés par le module de commande d’axes et par
les variateurs.
Les unités sont configurées avec PL7. La conversion d’unités du module de
commande d’axes en unités des variateurs de vitesse est réalisée automatiquement
par les modules TSX CSY 84 / 164, au travers du facteur d’échelle, configuré par
l’utilisateur.
346
35009561.01 07/2008
Interface langage
WRITE_PARAM et READ_PARAM
Rappel
Ces services permettent d’échanger les paramètres de réglage entre le processeur
(application) et le module de commande d’axes.
READ_PARAM : lecture explicite des paramètres dans le module de commande
d’axes et mise à jour des mots de réglage %MW/D/Fxy.i.r.
WRITE_PARAM : écriture explicite des paramètres dans le module de commande
d’axes. Cette instruction permet de modifier par programme les valeurs de réglage
définies en configuration.
Syntaxe de
l’instruction
READ_PARAM
READ_PARAM %CHxy.i : lecture des paramètres de réglage de la voie i, du module
situé à l’adresse xy (numéro de rack, position dans le rack).
Exemple : READ_PARAM %CH3.1 (lecture des paramètres de la voie 1, du module
situé en position 3 du rack 0).
Syntaxe de
l’instruction
WRITE_PARAM
WRITE_PARAM %CHxy.i : écriture des paramètres de réglage de la voie i, du
module situé à l’adresse xy (numéro de rack, position dans le rack).
Exemple : WRITE_PARAM %CH104.2 (écriture des paramètres de la voie 2, du
module situé en position 4 du rack 1).
Contrôle de
l’échange
35009561.01 07/2008
Les 2 bits suivants peuvent être utilisés pour contrôler les échanges de paramètres
de réglage entre le processeur et le module :
Bit
Signification
%MWxy.i.0:X2
Ce bit est positionné à 1 lorsque l’échange est en cours. Il est remis à 0
lorsque l’échange est terminé.
%MWxy.i.1:X2
Ce bit est positionné à 1 si les paramètres transmis sont hors bornes ou
erronés.
347
Interface langage
SAVE_PARAM et RESTORE_PARAM
Rappel
Ces services permettent de sauvegarder ou de restituer les paramètres de réglage.
SAVE_PARAM : sauvegarde explicite des paramètres du module de commande
d’axes. Ces paramètres remplacent les valeurs initiales définies en configuration.
RESTORE_PARAM : restitution explicite des paramètres de réglage initiaux (écrits
lors de la configuration ou lors de la dernière sauvegarde).
Syntaxe de
l’instruction
SAVE_PARAM
SAVE_PARAM %CHxy.i : sauvegarde des paramètres de réglage de la voie i, du
module situé à l’adresse xy (numéro de rack, position dans le rack).
Exemple : SAVE_PARAM %CH3.1 (sauvegarde des paramètres de la voie 1, du
module situé en position 3 du rack 0).
Syntaxe de
l’instruction
RESTORE_PAR
AM
RESTORE_PARAM %CHxy.i : restitution des paramètres de réglage de la voie i, du
module situé à l’adresse xy (numéro de rack, position dans le rack).
Contrôle de
l’échange
Les 2 bits suivants peuvent être utilisés pour contrôler l’écriture de paramètres de
réglage dans le module :
348
Exemple : RESTORE_PARAM %CH104.2 (restitution des paramètres de la voie 2,
du module situé en position 4 du rack 1).
Bit
Signification
%MWxy.i.0:X2
Ce bit est positionné à 1 lorsque l’échange est en cours. Il est remis à 0
lorsque l’échange est terminé.
%MWxy.i.1:X2
Ce bit est positionné à 1 si les paramètres transmis sont hors bornes ou
erronés.
35009561.01 07/2008
Interface langage
WRITE_CMD
Rappel
Ce service permet d’émettre une commande vers le module de commande d’axes.
WRITE_CMD : écriture explicite des mots de commande dans le module. Cette
opération s’effectue à partir de mots internes %MW qui contiennent la commande à
réaliser et ses paramètres (par exemple, une commande de mouvement).
Syntaxe de
l’instruction
WRITE_CMD
WRITE_CMD %CHxy.i : écriture des informations de commande de la voie i, du
module situé à l’adresse xy (numéro de rack, position dans le rack).
Exemple : WRITE_CMD %CH3.1 (écriture des informations de commande de la
voie 1, du module situé en position 3 du rack 0).
Interface
WRITE_CMD
35009561.01 07/2008
La commande à réaliser est définie dans le mot %MWxy.i.26 et le résultat de la
commande est disponible dans les mots %MWxy.i.19 à %MWxy.i.24
Adresse
Type
Symbole
Signification
%MWxy.i.19
Mot
ERROR_CMD
Erreur d’écriture de la commande
WRITE_CMD
%MDxy.i.20
Double Mot
RETURN_CMD_1 Retour 1 de la fonction
%MFxy.i.22
Flottant
RETURN_CMD_2 Retour 2 de la fonction
%MFxy.i.24
Flottant
RETURN_CMD_3 Retour 3 de la fonction
%MWxy.i.26
Mot
ACTION_CMD
Action à réaliser
%MDxy.i.27
Double Mot
PARAM_CMD_1
Paramètre 1
%MDxy.i.29
Double Mot
PARAM_CMD_2
Paramètre 2
%MFxy.i.31
Flottant
PARAM_CMD_3
Paramètre 3
%MFxy.i.33
Flottant
PARAM_CMD_4
Paramètre 4
349
Interface langage
Interface
WRITE_CMD
dans le cas d’un
groupe d’axes
coordonnés
Dans le cas d’un groupe d’axes coordonnés, les fonctions de mouvement
nécessitent d’envoyer 2 paramètres par axe coordonné (position et vitesse) :
Adresse
Type
Symbole
Signification
...
...
...
...
%MDxy.i.27
Double Mot
PARAM_CMD_1
Paramètre 1
%MDxy.i.29
Double Mot
PARAM_CMD_2
Paramètre 2
%MFxy.i.31
Flottant
PARAM_CMD_3
Paramètre 3
%MFxy.i.33
Flottant
PARAM_CMD_4
Paramètre 4
%MFxy.i.35
Flottant
PARAM_CMD_5
Paramètre 5 (*)
...
...
...
...
%MFxy.i.61
Flottant
PARAM_CMD_18
Paramètre 18 (*)
(*) Uniquement avec les fonctions "groupe d’axes coordonnés".
Contrôle de
l’échange
350
Les 2 bits suivants peuvent être utilisés pour contrôler l’écriture des informations de
commande dans le module :
Bit
Signification
%MWxy.i.0:X1
Ce bit est positionné à 1 lorsque l’échange est en cours. Il est remis à 0
lorsque l’échange est terminé.
%MWxy.i.1:X1
Ce bit est positionné à 1 si les paramètres transmis sont hors bornes ou
erronés.
35009561.01 07/2008
Interface langage
WRITE_CMD Exemples
Exemple 1 :
Initialisation des
défauts
Initialiser les défauts sur le bus en anneau du module 4 situé dans le rack 1 :
!
(*Si pas de WRITE_CMD en cours, alors initialisation des défauts*)
IF NOT %MW104.0.0:X1 THEN %MW104.0.26 := 409;
WRITE_CMD %CH104.0;
END_IF;
Exemple 2 :
Ecriture de la
puissance
optique
Définir (écrire) la puissance optique :
!
(*Si pas de WRITE_CMD en cours, alors écriture (set) de la
puissance optique*)
IF NOT %MW104.0.0:X1 THEN %MW104.0.26 := 2547;
%MF104.0.31 := 51.5;
//Paramètre 3 : puissance optique = 51.5
WRITE_CMD %CH104.0;
END_IF;
Exemple 3 :
Lecture du
rapport de
transmission
Lire le rapport de transmission (BAUD_RATE) :
!
(*Si pas de WRITE_CMD en cours, alors lecture (get) du rapport de
transmission*)
IF NOT %MW104.0.0:X1 THEN %MW104.0.26 := 1558;
WRITE_CMD %CH104.3;
END_IF;
!
(*Si WRITE_CMD terminé et si pas de défaut, alors la valeur du
rapport de transmission est accessible dans retour 1*)
IF NOT %MW104.0.0:X1 AND NOT %MW104.0.1:X1
THEN BAUD_RATE: =%MD104.0.20; //rapport de transmission dans retour 1
END_IF;
35009561.01 07/2008
351
Interface langage
Exemple 4 :
Déplacer un axe
réel
Déplacer l’axe réel 3 du module 4 positionné dans le rack 1, à la position 105.2, à la
vitesse 5 avec une commande "MOVE absolu immédiat" :
!
(*Si pas de WRITE_CMD en cours, alors déplacer l’axe réel 3*)
IF NOT %MW104.3.0:X1 THEN %MW104.3.26 := 513;
%MD104.3.27 := 0;
//Paramètre 1 : type de mouvement = absolu
%MF104.3.31 := 105.2;
//Paramètre 3 : position = 105.2
%MF104.3.33 := 5.0;
//Paramètre 4 : vitesse = 5
WRITE_CMD %CH104.3;
END_IF;
Exemple 5 : Lire
la position d’un
esclave
Lire la position relative d’un esclave suiveur lorsque le maître est en 102.5 :
!
(*Si pas de WRITE_CMD en cours, alors lire la position de l’esclave
suiveur*)
IF NOT %MW104.26.0:X1 THEN %MW104.26.26 := 537;
%MF104.26.31 := 102.5;
//Paramètre 3 : position du maître = 102.5
WRITE_CMD %CH104.26;
END_IF;
!
(*Si WRITE_CMD terminé et si pas de défaut, alors la position de
l’esclave est accessible dans retour 2*)
IF NOT %MW104.26.0:X1 AND NOT %MW104.26.1:X1
THEN SLAVE_POSITION
:=%MF104.26.22;
//position dans retour 2
END_IF;
352
35009561.01 07/2008
Interface langage
READ_STS
Rappel
Ce service permet de lire de manière explicite, les mots d’état associés au module
de commande d’axes ou aux différentes voies.
Syntaxe de
l’instruction
READ_STS
(module)
READ_STS %CHxy.MOD : lecture des informations de diagnostic générale du
module situé à l’adresse xy (numéro de rack, position dans le rack).
Syntaxe de
l’instruction
READ_STS
(voie)
READ_STS %CHxy.i : lecture des informations de diagnostic de la voie i, du module
situé à l’adresse xy (numéro de rack, position dans le rack).
Contrôle de
l’échange
Les 2 bits suivants peuvent être utilisés pour contrôler les échanges de mots d’état
entre le module et le processeur
35009561.01 07/2008
Exemple : READ_STS %CH203.MOD (lecture des informations de diagnostic du
module situé en position 3 du rack 2).
Exemple : READ_STS %CH102.1 (lecture des informations de diagnostic de la voie
1, du module situé en position 2 du rack 1).
Bit
Signification
%MWxy.i.0:X0
Ce bit est positionné à 1 lorsque la lecture est en cours. Il est remis à 0
lorsque l’échange est terminé.
%MWxy.i.1:X0
Ce bit donne le compte-rendu de l’échange. Il est positionné à 1 en cas de
défaut.
353
Interface langage
TRF_RECIPE et MOD_PARAM
Rappel
TRF_RECIPE :
cette instruction est détaillée dans ce manuel (Voir Instruction TRF_RECIPE,
p. 259).
z
MOD_PARAM :
cette instruction est détaillée dans ce manuel (Voir Reconfiguration dynamique des
groupes, p. 398).
z
354
35009561.01 07/2008
Interface langage
10.2
Liste des variables
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre donne la liste des variables accessibles pour les modules
TSX CSY 84 / 164.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
Sujet
Variables d’entrée échangées de manière implicite
35009561.01 07/2008
Page
356
Variables de sortie échangées de manière implicite
359
Paramètres de réglage de la fonction SERCOS®
362
Paramètres de réglage d’un axe indépendant
363
Paramètres de réglage d’un groupe d’axes suiveurs
366
Mots constants
370
355
Interface langage
Variables d’entrée échangées de manière implicite
356
35009561.01 07/2008
Interface langage
Bits et mots
d’entrée
35009561.01 07/2008
Les 32 bits et le mot d’entrée suivants sont échangés de manière implicite entre le
processeur et le module de commande d’axes :
Repère
Type
Symbole
Description
%Ixy.i.ERR
Bit
ERR
Défaut voie
%Ixy.i.0
Bit
RAMPING
Indique si l’axe est en accélération
ou en décélération
%Ixy.i.1
Bit
STEADY
La vitesse est constante
%Ixy.i.2
Bit
STOPPING
Le mouvement décélère jusqu’à
l’arrêt
%Ixy.i.3
Bit
PROFILE_END
La dernière commande du profil a
été envoyée au module
%Ixy.i.4
Bit
IN_POSITION
La position de l’axe est située dans
la fenêtre au point
%Ixy.i.5
Bit
AXIS_HOMING
L’axe réalise une prise d’origine.
Avec un axe imaginaire, ce bit est
inactif
%Ixy.i.6
Bit
AXIS_HOMED
La position de l’axe est référencée
par rapport à prise l’origine
%Ixy.i.7
Bit
AXIS_NOT_FOLLOWING
Le variateur ne prend pas en compte
les commandes du module
%Ixy.i.8
Bit
HOLDING
L’axe est arrête en position d’attente
%Ixy.i.9
Bit
RESUMING
L’axe est en mouvement après une
attente
%Ixy.i.10
Bit
DRIVE_ENABLED
Le variateur de vitesse est activé
%Ixy.i.11
Bit
DRIVE_DIAG
Le variateur effectue un diagnostic
de classe 3
%Ixy.i.12
Bit
DRIVE_WARNING
Le variateur effectue un diagnostic
de classe 2
%Ixy.i.13
Bit
DRIVE_FAULT
Le variateur effectue un diagnostic
de classe 1
%Ixy.i.14
Bit
DRIVE_DISABLED
Le variateur de vitesse est désactivé
%Ixy.i.15
Bit
AXIS_SUMMARY_FAULT
Défaut du drive
%Ixy.i.16
Bit
AXIS_COMM_OK
La communication entre le module
et le variateur est correcte
%Ixy.i.17
Bit
AXIS_IS_LINKED
L’axe appartient à un groupe d’axes
%Ixy.i.18
Bit
AXIS_IN_COMMAND
L’axe est actif et peut être
commandé
%Ixy.i.19
Bit
/
Réservé
357
Interface langage
358
Repère
Type
Symbole
Description
%Ixy.i.20
Bit
AXIS_AT_TARGET
La position de l’axe est comprise
dans la fenêtre au point de la
position ciblée
%Ixy.i.21
Bit
AXIS_POS_LIMIT
La position de l’axe a atteint la limite
positive
%Ixy.i.22
Bit
AXIS_NEG_LIMIT
La position de l’axe a atteint la limite
négative
%Ixy.i.23
Bit
AXIS_WARNING
Etat Alerte Mouvement remonté par
le variateur
%Ixy.i.24
Bit
BIAS_REMAIN
Offset ajouté à la position de
commande
%Ixy.i.25
Bit
AXIS_MANUAL_MODE
0 : Mode Auto (par défaut)
1 : Mode manuel
%Ixy.i.26
Bit
DRIVE_REALTIME_BIT1
Bit variateur
%Ixy.i.27
Bit
DRIVE_REALTIME_BIT2
Bit variateur
%Ixy.i.28
Bit
AXIS_HOLD
L’axe est à l’arrêt en attente d’une
commande
%Ixy.i.29
Bit
AXIS_HALT
L’axe est à l’arrêt.
%Ixy.i.30
Bit
AXIS_FASTSTOP
L’axe s’est arrêté rapidement
%Ixy.i.31
Bit
AXIS_READY
L’axe est prêt pour répondre à une
commande
%Ixy.i.32
Bit
CONF_OK
La voie est configurée
%IFxy.i.0
Flottant POSITION
Position courante
35009561.01 07/2008
Interface langage
Variables de sortie échangées de manière implicite
35009561.01 07/2008
359
Interface langage
Bits et mots de
sortie
360
Les 32 bits et le mot de sortie suivants sont échangés de manière implicite entre le
processeur et le module de commande d’axes :
Repère
Type
Symbole
Description
%Qxy.i.0
Bit
/
Réservé
%Qxy.i.1
Bit
/
Réservé
%Qxy.i.2
Bit
CONTROL_ACQUIRE
Acquisition de la commande
%Qxy.i.3
Bit
/
Réservé
%Qxy.i.4
Bit
CONTROL_JOG_POS
• permet sur front montant de
réaliser des mouvements continus
dans le sens positif.
• permet sur front descendant de
stopper le mouvement en cours.
%Qxy.i.5
Bit
CONTROL_JOG_NEG
• permet sur front montant de
réaliser des mouvements continus
dans le sens négatif.
• permet sur front descendant de
stopper le mouvement en cours.
%Qxy.i.6
Bit
REALTIME_CONTROL_
BIT1
Bit de contrôle associé à une
commande IDN
%Qxy.i.7
Bit
REALTIME_CONTROL_
BIT2
Bit de contrôle associé à une
commande IDN
%Qxy.i.8
Bit
/
Réservé
%Qxy.i.9
Bit
/
Réservé
%Qxy.i.10
Bit
CONTROL_ENABLE
Validation de la commande
%Qxy.i.11
Bit
CONTROL_FOLLOW
Commande de suivi pour un axe ou
un groupe d’axes suiveurs
%Qxy.i.12
Bit
CONTROL_RESUME
Commande de reprise suite à un
arrêt
%Qxy.i.13
Bit
CONTROL_INC_POS
permet sur front montant de
réaliser des mouvements
incrémentaux sur un axe référencé
dans le sens positif.
%Qxy.i.14
Bit
CONTROL_INC_NEG
permet sur front montant de
réaliser des mouvements
incrémentaux sur un axe référencé
dans le sens négatif.
%Qxy.i.15
Bit
CONTROL_CLEAR_FAULT Commande d’initialisation des
défauts
%Qxy.i.16
Bit
/
Réservé
35009561.01 07/2008
Interface langage
Repère
35009561.01 07/2008
Type
Symbole
Description
%Qxy.i.17
Bit
/
Réservé
%Qxy.i.18
Bit
ALLOW_ACQUIRE
Commande de validation de
l’acquisition
%Qxy.i.19
Bit
/
Réservé
%Qxy.i.20
Bit
/
Réservé
%Qxy.i.21
Bit
/
Réservé
%Qxy.i.22
Bit
/
Réservé
%Qxy.i.23
Bit
/
Réservé
%Qxy.i.24
Bit
/
Réservé
%Qxy.i.25
Bit
/
Réservé
%Qxy.i.26
Bit
ALLOW_ENABLE
Commande de désactivation de
l’axe
%Qxy.i.27
Bit
ALLOW_FOLLOW
Commande l’annulation du suivi
pour un axe ou un groupe d’axes
suiveurs
%Qxy.i.28
Bit
ALLOW_RESUME
Commande d’autorisation de
poursuite d’un mouvement suite à
un arrêt par la commande HOLD
%Qxy.i.29
Bit
ALLOW_MOVE
Commande d’autorisation de
mouvement suite à un arrêt par la
commande HALT
%Qxy.i.30
Bit
ALLOW_NOT_FASTSTOP
Commande suite à un arrêt rapide
%Qxy.i.31
Bit
ALLOW_NOT_FAULT
Commande de validation des
défauts
%QDxy.i.0
Double
Mot
REMOTE_POSITION
Position simulée
361
Interface langage
Paramètres de réglage de la fonction SERCOS®
Liste des
paramètres
362
Avec la voie 0, les paramètres suivants sont échangés par les commandes
WRITE_PARAM et READ_PARAM :
Repère
Type
Symbole
Description
%MWxy.i.35
Mot
CYCLE_TIME
Temps de cycle de bus SERCOS®
(se reporter au chapitre 6 (Voir
Configuration de la fonction
SERCOS® (voie 0), p. 84),
Configuration de la fonction
SERCOS®)
%MWxy.i.36
Mot
BAUD_RATE
Débit sur le bus (en Baud)
%MWxy.i.37
Mot
OPTICAL_POWER
Puissance optique dans la fibre
35009561.01 07/2008
Interface langage
Paramètres de réglage d’un axe indépendant
35009561.01 07/2008
363
Interface langage
Liste des
paramètres
Avec les voies 1 à 16, les paramètres suivants sont échangés par les commandes
WRITE_PARAM et READ_PARAM :
Repère
364
Symbole
Description
%MWxy.i.35:X0 Bit
Type
ENABLE_ROLLOVER
Validation du mode modulo
%MWxy.i.35:X1 Bit
TEST_POSITION_BAND
Validation du contrôle de
position
%MWxy.i.35:X2 Bit
Réservé
Toujours à 0
%MWxy.i.35:X3 Bit
Réservé
Toujours à 0
%MWxy.i.35:X4 Bit
DISABLE_LIMITS_CHECKING Désactivation du contrôle des
limites
%MWxy.i.35:X5 Bit
/
Réservé
%MWxy.i.35:X6 Bit
_FREEWHEEL_STOP (**)
0 = sur défaut du module CSY
ou dévalidation du variateur
on génère un arrêt rapide sur
le rampe de décélération du
variateur (Rampe DECSTOP
sur LEXIUM configurable par
UNILINK,IDN P 3022 ou par
code ascii).
1 = arrêt en roue libre lors d’un
défaut ou d’une dévalidation
%MFxy.i.36
Flottant
ACCEL
Valeur d’accélération
%MFxy.i.38
Flottant
DECEL
Valeur de décélération
%MWxy.i.40
Mot
ACCEL_TYPE
Type d’accélération
%MFxy.i.41
Flottant
IN_POSITION_BAND
Valeur de la fenêtre au point
%MFxy.i.43
Flottant
ENABLE_POSITION_BAND
Valeur de la fenêtre de
contrôle
%MFxy.i.45
Flottant
ROLLOVER_MAX
Modulo maximal
%MFxy.i.47
Flottant
ROLLOVER_MIN
Modulo minimal
%MFxy.i.49
Flottant
ACCEL_MAX
Accélération maximale
%MFxy.i.51
Flottant
DECEL_MAX
Décélération maximale
%MFxy.i.53
Flottant
SPEED_MAX
Vitesse maximale
%MFxy.i.55
Flottant
POSITION_MAX
Position maximale
%MFxy.i.57
Flottant
POSITION_MIN
Position minimale
%MFxy.i.59
Flottant
SCALE_NUMERATOR
Numérateur du facteur
d’échelle (*)
%MFxy.i.61
Flottant
SCALE_DENOMINATOR
Dénominateur du facteur
d’échelle (*)
35009561.01 07/2008
Interface langage
Repère
Type
Symbole
Description
%MWxy.i.63
Mot
ACCEL_UNITS
Unité d’accélération
%MWxy.i.64
Mot
SPEED_UNITS
Unité de vitesse
%MWxy.i.65
Mot
POSITION_UNITS
Unité de position
(*) Se reporter à la configuration d’un axe indépendant et à la fonction
GetGearRatio.
(**) : important :
Note : l'action de ce bit n'est validé qu'après une écriture dans les mots constants
%Kx de la configuration voie.
Pour cela effectuer un SAVE_PARAM de la voie ( aprés avoir effectué le
WRITE_PARAM ).
Exemple : SAVE _PARAM sur la voie 1 du module emplacement 4 :
IF %M37 THEN
SAVE_PARAM %CH4.1;
RESET %M37;
END_IF;
35009561.01 07/2008
365
Interface langage
Paramètres de réglage d’un groupe d’axes suiveurs
366
35009561.01 07/2008
Interface langage
Liste des
paramètres
Avec les voies 21 à 24, les paramètres suivants sont échangés par les commandes
WRITE_PARAM et READ_PARAM pour les modules TSX CSY 84 /164 et la
commande MOD_PARAM pour le module TSX CSY 164 :
Repère
Type
Symbole
Description
%MWxy.i.35
Mot
MASTER_CHANNEL
Numéro de l’axe maître
%MWxy.i.36
Mot
SLAVE_CHANNEL_1
Numéro de l’axe esclave 1
%MWxy.i.37
Mot
FOLL_DESCRIPTION_1
Définition de l’axe esclave 1
%MWxy.i.37:X0
Bit
FOLL_WHERE_1
0 = Contrôleur
%MWxy.i.37:X1
Bit
FOLL_TYPE_1
0 = mode Ratio; 1 = mode Came
%MWxy.i.37:X2
Bit
FOLL_POSITION_1
0 = suivi de la position mesurée; 1 = suivi de la position
de consigne
%MWxy.i.37:X3
Bit
FOLL_FOLLOW_ON_
HALT_1
1 = arrêt de l’axe suiveur si suppression du lien maître/
esclave
%MWxy.i.37:X4
Bit
/
Toujours à 0
%MWxy.i.37:X5
Bit
/
Toujours à 0
%MWxy.i.37:X6
Bit
FOLL_HALT_MASTER_1
0 = rien,
1 = arrêt normal du maître lors d’undéfaut sur l’esclave
%MWxy.i.37:X7
Bit
FOLL_BIAS_REMAINS_1
1 = offset dynamique sur position du maître
Bit
%MWxy.i.37:X8
à
%MWxy.i.37:X10
FOLL_START_1
Condition de démarrage :
0 = Immédiat
1 = position du maître atteint dans le sens négatif le seuil
2 = position du maître atteint dans le sens positif le seuil
3 = position du maître > seuil
4 = position du maître < seuil
%MWxy.i.37:X11 Bit
FOLL_FAULT_MASTER_1
(*)
0 = Pas d'effet sur la gestion du maître lors d'un défaut
esclave
1 = si HALT_MASTER (%MWxy,i37:X6) = 0 Pas d'arrêt
du maître .
1 = si HALT_MASTER (%MWxy,i,37:X6) = 1 sur défaut
module CSY ou défaut variateur ou dévalidation d'un
des variateurs esclave on génère un arrêt rapide sur le
rampe de décélération du variateur de l'axe MAITRE
(rampe de décélération DECSTOP sur LEXIUM
configurable par UNILINK,par IDN P 3022 ou par code
ascii).
35009561.01 07/2008
367
Interface langage
Repère
Symbole
Description
%MWxy.i.37:X12 Bit
FOLL_FAULT_SLAVE_1 (*)
0 = pas d'effet sur la gestion des esclaves lors d'un
défaut maître
1 = sur défaut module CSY ou un défaut variateur ou
dévalidation du variateur MAITRE du groupe suiveur on
génère un arrêt rapide sur le rampe de décélération des
variateurs ESCLAVES (rampe de décélération
DECSTOP sur LEXIUM configurable par UNILINK,par
IDN P 3022 ou par code ascii).
%MWxy.i.37:X13 Bit
à
%MWxy.i.37:X15
/
Toujours à 0
%MFxy.i.38
Type
Flottant NUMERATOR_1
Numérateur de l’axe esclave 1
%MFxy.i.40
Flottant DENOMINATOR_1
Dénominateur de l’axe esclave 1
%MFxy.i.42
Flottant TRIGGER_POSITION_1
Valeur du seuil de l’axe esclave 1
%MWxy.i.44
Mot
SLAVE_CHANNEL_2
Numéro de l’axe esclave 2
%MWxy.i.45
Mot
FOLL_DESCRIPTION_2
Définition de l’axe esclave 2. La description des bits est
identique à celle de l’axe esclave 1.
%MFxy.i.46
Flottant NUMERATOR_2
Numérateur de l’axe esclave 2
%MFxy.i.48
Flottant DENOMINATOR_2
Dénominateur de l’axe esclave 2
%MFxy.i.50
Flottant TRIGGER_POSITION_2
Valeur du seuil de l’axe esclave 2
%MWxy.i.52
Mot
SLAVE_CHANNEL_3
Numéro de l’axe esclave 3
%MWxy.i.53
Mot
FOLL_DESCRIPTION_3
Définition de l’axe esclave 3. La description des bits est
identique à celle de l’axe esclave 1.
%MFxy.i.54
Flottant NUMERATOR_3
Numérateur de l’axe esclave 3
%MFxy.i.56
Flottant DENOMINATOR_3
Dénominateur de l’axe esclave 3
%MFxy.i.58
Flottant TRIGGER_POSITION_3
Valeur du seuil de l’axe esclave 3
%MWxy.i.60
Mot
SLAVE_CHANNEL_4
Numéro de l’axe esclave 4
%MWxy.i.61
Mot
FOLL_DESCRIPTION_4
Définition de l’axe esclave 4. La description des bits est
identique à celle de l’axe esclave 1.
%MFxy.i.62
Flottant NUMERATOR_4
Numérateur de l’axe esclave 4
%MFxy.i.64
Flottant DENOMINATOR_4
Dénominateur de l’axe esclave 4
%MFxy.i.66
Flottant TRIGGER_POSITION_4
Valeur du seuil de l’axe esclave 4
%MWxy.i.68
Mot
SLAVE_CHANNEL_5
Numéro de l’axe esclave 5
%MWxy.i.69
Mot
FOLL_DESCRIPTION_5
Définition de l’axe esclave 5. La description des bits est
identique à celle de l’axe esclave 1.
%MFxy.i.70
Flottant NUMERATOR_5
Numérateur de l’axe esclave 5
%MFxy.i.72
Flottant DENOMINATOR_5
Dénominateur de l’axe esclave 5
368
35009561.01 07/2008
Interface langage
Repère
Type
Symbole
Description
%MFxy.i.74
Flottant TRIGGER_POSITION_5
Valeur du seuil de l’axe esclave 5
%MWxy.i.76
Mot
SLAVE_CHANNEL_6
Numéro de l’axe esclave 6
%MWxy.i.77
Mot
FOLL_DESCRIPTION_6
Définition de l’axe esclave 6. La description des bits est
identique à celle de l’axe esclave 1.
%MFxy.i.78
Flottant NUMERATOR_6
Numérateur de l’axe esclave 6
%MFxy.i.80
Flottant DENOMINATOR_6
Dénominateur de l’axe esclave 6
%MFxy.i.82
Flottant TRIGGER_POSITION_6
Valeur du seuil de l’axe esclave 6
(*) important :
Note : l'action de ces bits n'est validé qu'après une écriture dans les mots
constants %Kx de la configuration du Groupe.
Pour cela effectuer un MOD_PARAM sur le Groupe.
Exemple : MOD_PARAM sur le groupe suiveur 24 du module emplacement 4 :
IF %M38 THEN
MOD_PARAM %CH4.24(0,0,0,0);
RESET %M38;
END_IF;
35009561.01 07/2008
369
Interface langage
Mots constants
Liste des mots
constants
370
Le tableau ci-dessous donne la liste des mots constants :
Repère
Type
Symbole
Description
%KWxy.i.0
Mot
CHANNEL_ID
Identification de la voie
%KWxy.i.2
Mot
SERCOS_ADD
Adresse SERCOS® de l’axe
(uniquement pour un axe réel ou un
axe à mesure externe)
35009561.01 07/2008
Annexes
11
Présentation
Objet de ce
chapitre
Ce chapitre décrit toutes les informations annexes au document : performances et
limitations, liste des données de mouvement, fonctions de lecture / écriture des IDN.
Contenu de ce
chapitre
Ce chapitre contient les sous-chapitres suivants :
35009561.01 07/2008
Souschapitre
Sujet
11.1
Liste des fonctions accessibles
Page
372
371
Annexes
11.1
Liste des fonctions accessibles
Présentation
Objet de ce
sous-chapitre
Ce sous-chapitre rappelle les différentes fonctions accessibles pour les modules
TSX CSY 84 / 164.
Contenu de ce
sous-chapitre
Ce sous-chapitre contient les sujets suivants :
372
Sujet
Page
Fonctions accessibles pour la voie 0 SERCOS®
373
Fonctions accessibles pour un axe réel
375
Fonctions accessibles pour un axe imaginaire
379
Fonctions accessibles pour un axe à mesure externe
382
Fonctions accessibles pour un groupe d’axes coordonnés
384
Fonctions accessibles pour un groupe d’axes suiveurs
386
Fonctions accessibles pour un profil de came
388
35009561.01 07/2008
Annexes
Fonctions accessibles pour la voie 0 SERCOS®
Fonctions de
réglage
Fonctions de
diagnostic
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Paramètres
GetOpticalPower
1547
Retour 2 : Pourcentage
Sans
SetOpticalPower
2547
Sans
Paramètre 3 :
Pourcentage
Le tableau suivant donne la liste des fonctions de diagnostic :
Fonction
Code
Retours
Paramètres
GetActualPhase
550
Retour 1 : Phase
Sans
GetAxisID
523
Retour 1 : Identificateur
Sans
GetCommandedPhase
1545
Retour 1 : Phase
Sans
GetCombinedControl
1534
Retour 1 : Bits Commande
de Mouvement
Sans
GetControl
1525
Retour 1 : Bits Commande
de Mouvement
Sans
Sans
GetLoopDiagnosticMode
1546
Retour 1 : Mode diagnostic
GetMotionFault
5510
Retour 1 : Liste des défauts Sans
GetMotionWarning
5511
Retour 1 : Liste des
avertissements
Sans
GetNumberOfDrivesInRing 548
Renvoi 1 : Nbre variateurs
Sans
GetNumberInSet
541
Retour 1 : Nbre d’axes
Sans
GetSercosAddress
549
Retour 1 : Adresse
Paramètre 1 : Axe
IsLoopUp
543
Retour 1 : 0 / 1
Sans
SetCommandedPhase
2545
Sans
Paramètre 1 : Phase
SetLoopDiagnosticMode
2546
Sans
Paramètre 1 : Mode
diagnostic
373
Annexes
Fonctions de
lecture et
d’écriture des
paramètres IDN
374
Le tableau suivant donne la liste des fonctions de lecture / écriture des paramètres
IDN des variateurs SERCOS® :
Fonction
Code
Retours
Paramètres
GetIDN_S
1556
Retour 1 : Paramètre SERCOS®
Paramètre 1 : Identificateur
GetIDN_P
1557
Retour 1 : Paramètre SERCOS®
Paramètre 1 : Identificateur
GetIDN_US
1558
Retour 1 : Paramètre SERCOS®
Paramètre 1 : Identificateur
GetIDN_UP
1559
Retour 1 : Paramètre SERCOS®
Paramètre 1 : Identificateur
SetIDN_S
2556
Sans
Paramètre 1 : Identificateur
Paramètre 2 : Paramètre
SERCOS®
SetIDN_P
2557
Sans
Paramètre 1 : Identificateur
Paramètre 2 : Paramètre
SERCOS®
SetIDN_US
2558
Sans
Paramètre 1 : Identificateur
Paramètre 3 : Paramètre
SERCOS®
SetIDN_UP
2559
Sans
Paramètre 1 : Identificateur
Paramètre 3 : Paramètre
SERCOS®
35009561.01 07/2008
Annexes
Fonctions accessibles pour un axe réel
Fonctions de
commande de
mouvement
Fonctions de
mouvement
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de commande de mouvement :
Fonction
Code
Retours
Paramètres
ForcedHome
6039
Sans
Sans
Home
6034
Sans
Paramètre 3 : Direction
Paramètre 4 : Vitesse
Unhome
6038
Sans
Sans
Le tableau suivant donne la liste des fonctions de mouvement :
Fonction
Code
Retours
Paramètres
MoveImmed
513
Sans
Paramètre 1 : Type
Paramètre 2 : Cœfficient Acc/Dec
Paramètre 3 : Position
Paramètre 4 : Vitesse
MoveImmed_G30
554
Sans
Paramètre 1 : Type
Paramètre 2 : Nbre de points
Paramètre 3 : Points sur le trajet
Paramètre 4 : Vitesse d’approche
MoveQueue
520
Sans
Paramètre 1 : Type
Paramètre 2 : Cœfficient Acc/Dec
Paramètre 3 : Position
Paramètre 4 : Vitesse
EnableRealTimeCtrlBit
2564
Sans
Paramètre 1 :
Validation (1)
Dévalidation (0)
375
Annexes
Fonctions de
réglage
376
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Paramètres
DisableRollover
412
Sans
Sans
EnableRollover
411
Sans
Sans
GetAccel
1041
Retour 2 : Accélération
Sans
GetAccelMax
1116
Retour 2 : Accélération
Sans
GetActualSpeed
5065
Retour 1 : Vitesse
Sans
GetDecel
1042
Retour 2 : Décélération
Sans
GetDecelMax
1117
Retour 2 : Décélération
Sans
GetDefaultSpeed
1065
Retour 1 : Vitesse
Sans
GetChangeACCDECMove
1172
Retour 1 :
1 : FCt validée : prise en
compte de
PARAM_CMD_2 dans
les opcodes 513 et 520.
0 : FCt dévalidée.
Sans
GetEnableMode
1524
Retour 1 : Mode
Sans
GetEnablePositonBand
1538
Retour 2 : Position
Sans
GetInPositionBand
1035
Retour 2 : Position
Sans
GetPositionLimit
1505
Retour 2 : Position
Paramètre 1 : Direction
GetRolloverLimit
1539
Retour 2 : Position
Paramètre 1 : Direction
GetSpeedLimit
1066
Retour 2 : Vitesse
Sans
GetSpeedOverride
1513
Retour 2 : Pourcentage
Sans
GetUnrolled
CommandedPosition
547
Retour 2 : Position
Sans
GetUnrolledPosition
546
Retour 2 : Position
Sans
SetAccel
2041
Sans
Paramètre 3 : Accélération
SetAccelMax
2116
Sans
Paramètre 3 : Accélération
SetDecel
2042
Sans
Paramètre 3 : Décélération
SetDecelMax
2117
Sans
Paramètre 3 : Décélération
SetChangeACCDECMove
2172
Sans
Paramètre 1 :
1 : FCt validée : prises en
compte de
PARAM_CMD_2 dans les
opcodes 513 et 520.
0 : FCt dévalidée.
SetDefaultSpeed
2065
Sans
Paramètre 1 : Vitesse
SetEnableMode
2524
Sans
Paramètre 1 : Mode
35009561.01 07/2008
Annexes
Fonctions de
diagnostic
35009561.01 07/2008
Fonction
Code
Retours
Paramètres
SetEnablePositionBand
2538
Sans
Paramètre 3 : Position
SetInPositionBand
2035
Sans
Paramètre 3 : Position
SetPosition
2053
Sans
Paramètre 3 : Position
SetPositionLimit
2505
Sans
Paramètre 1 : Direction
Paramètre 3 : Position
SetRolloverLimit
2539
Sans
Paramètre 1 : Direction
Paramètre 3 : Position
SetSpeedLimit
2066
Sans
Paramètre 3 : Vitesse
SetSpeedOverride
2513
Sans
Paramètre 3 : Pourcentage
Le tableau suivant donne la liste des fonctions de diagnostic :
Fonction
Code
Retours
Paramètres
GetAxisId
523
Retour 1 : Identificateur
Sans
GetCommandedPosition 1053
Retour 2 : Position
Sans
GetCombinedControl
1534
Retour 1 : Bits Commande
de Mouvement
Sans
GetControl
1525
Retour 1 : Bits Commande
de Mouvement
Sans
GetMotionFault
5510
Retour 1 : Liste des défauts
Sans
GetMotionWarning
5511
Retour 1 : Liste des
avertissements
Sans
GetMoveQueueLength
9510
Renvoi 1 : Longueur
Sans
GetNumberInSet
541
Retour 1 : Nbre d’axes
Sans
GetSercosAddress
549
Retour 1 : Adresse
Sans
377
Annexes
Fonctions de
configuration
Fonctions de
lecture et
d’écriture des
paramètres IDN
378
Le tableau suivant donne la liste des fonctions de configuration :
Fonction
Code
Retours
Paramètres
GetAccelType
1540
Retour 1 : Type d’accélération
Sans
GetGearRatio
1500
Retour 2 : Numérateur
Retour 3 : Dénominateur
Sans
SetAccelType
2540
Sans
Paramètre 1 : Type
d’accélération
SetGearRatio
2500
Sans
Paramètre 3 : Numérateur
Paramètre 4 : Dénominateur
Le tableau suivant donne la liste des fonctions de lecture / écriture des paramètres
IDN des variateurs SERCOS® :
Fonction
Code
Retours
GetIDN_S
1556
Retour 1 : Paramètre SERCOS® Paramètre 1 : Identificateur
Paramètres
GetIDN_P
1557
Retour 1 : Paramètre SERCOS® Paramètre 1 : Identificateur
GetIDN_US
1558
Retour 1 : Paramètre SERCOS® Paramètre 1 : Identificateur
GetIDN_UP
1559
Retour 1 : Paramètre SERCOS® Paramètre 1 : Identificateur
SetIDN_S
2556
Sans
Paramètre 1 : Identificateur
Paramètre 2 : Paramètre
SERCOS®
SetIDN_P
2557
Sans
Paramètre 1 : Identificateur
Paramètre 2 : Paramètre
SERCOS®
SetIDN_US
2558
Sans
Paramètre 1 : Identificateur
Paramètre 3 : Paramètre
SERCOS®
SetIDN_UP
2559
Sans
Paramètre 1 : Identificateur
Paramètre 3 : Paramètre
SERCOS®
35009561.01 07/2008
Annexes
Fonctions accessibles pour un axe imaginaire
Fonctions de
commande de
mouvement
Fonctions de
mouvement
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de commande de mouvement :
Fonction
Code
Retours
Paramètres
ForcedHome
6039
Sans
Sans
Home
6034
Sans
Paramètre 3 : Direction
Paramètre 4 : Vitesse
Unhome
6038
Sans
Sans
Le tableau suivant donne la liste des fonctions de mouvement :
Fonction
Code
Retours
Paramètres
MoveImmed
513
Sans
Paramètre 1 : Type
Paramètre 2 : Cœfficient ACC/DEC
Paramètre 3 : Position
Paramètre 4 : Vitesse
MoveImmed_G30
554
Sans
Paramètre 1 : Type
Paramètre 2 : Nbre de points
Paramètre 3 : Points sur le trajet
Paramètre 4 : Vitesse d’approche
MoveQueue
520
Sans
Paramètre 1 : Type
Paramètre 2 : Cœfficient ACC/DEC
Paramètre 3 : Position
Paramètre 4 : Vitesse
379
Annexes
Fonctions de
réglage
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Paramètres
DisableRollover
412
Sans
Sans
EnableRollover
411
Sans
Sans
GetAccel
1041
Retour 2 : Accélération
Sans
GetAccelMax
1116
Retour 2 : Accélération
Sans
GetActualSpeed
5065
Retour 1 : Vitesse
Sans
GetDecel
1042
Retour 2 : Décélération
Sans
GetDecelMax
1117
Retour 2 : Décélération
Sans
GetDefaultSpeed
1065
Retour 1 : Vitesse
Sans
GetChangeACCDECMove
1172
Retour 1 :
1 : FCt validée : prise en compte
de PARAM_CMD_2 dans les
opcodes 513 et 520.
0 : FCt dévalidée.
Sans
GetEnablePositonBand
1538
Retour 2 : Position
Sans
GetPositionLimit
1505
Retour 2 : Position
Paramètre 1 : Direction
GetRolloverLimit
1539
Retour 2 : Position
Paramètre 1 : Direction
GetSpeedLimit
1066
Retour 2 : Vitesse
Sans
GetSpeedOverride
1513
Retour 2 : Pourcentage
Sans
GetUnrolled
CommandedPosition
547
Retour 2 : Position
Sans
GetUnrolledPosition
546
Retour 2 : Position
Sans
SetAccel
2041
Sans
Paramètre 3 : Accélération
SetAccelMax
2116
Sans
Paramètre 3 : Accélération
SetDecel
2042
Sans
Paramètre 3 : Décélération
SetDecelMax
2117
Sans
Paramètre 3 : Décélération
SetDefaultSpeed
2065
Sans
Paramètre 1 : Vitesse
SetChangeACCDECMove
2172
Sans
Paramètre 1 :
1 : FCt validée : prises en compte de
PARAM_CMD_2 dans les opcodes 513 et
520.
0 : FCt dévalidée.
SetEnablePositionBand
2538
Sans
Paramètre 3 : Position
SetPosition
2053
Sans
Paramètre 3 : Position
SetPositionLimit
2505
Sans
Paramètre 1 : Direction
Paramètre 3 : Position
380
35009561.01 07/2008
Annexes
Fonction
Code
Retours
Paramètres
SetRolloverLimit
2539
Sans
Paramètre 1 : Direction
Paramètre 3 : Position
SetSpeedLimit
2066
Sans
Paramètre 3 : Vitesse
SetSpeedOverride
2513
Sans
Paramètre 3 : Pourcentage
Fonctions de
diagnostic
Fonctions de
configuration
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de diagnostic :
Fonction
Code
Retours
Paramètres
GetAxisId
523
Retour 1 : Identificateur de
l’axe
Sans
GetCommandedPosition 1053
Retour 2 : Position
Sans
GetCombinedControl
1534
Retour 1 : Bits Commande
de Mouvement
Sans
GetControl
1525
Renvoi 1 : Bits Commande
de Mouvement
Sans
GetMotionFault
5510
Retour 1 : Liste des défauts Sans
GetMotionWarning
5511
Renvoi 1 : Liste des
avertissements
Sans
GetMoveQueueLength
9510
Retour 1 : Longueur
Sans
GetNumberInSet
541
Retour 1 : Nbre d’axes
Sans
Le tableau suivant donne la liste des fonctions de configuration :
Fonction
Code
Retours
GetAccelType
1540
Retour 1 : Type d’accélération Sans
Paramètres
GetGearRatio
1500
Retour 2 : Numérateur
Retour 3 : Dénominateur
Sans
SetAccelType
2540
Sans
Paramètre 1 : Type
d’accélération
SetGearRatio
2500
Sans
Paramètre 3 : Numérateur
Paramètre 4 :
Dénominateur
381
Annexes
Fonctions accessibles pour un axe à mesure externe
Fonctions de
commande de
mouvement
Fonctions de
réglage
382
Le tableau suivant donne la liste des fonctions de commande de mouvement :
Fonction
Code
Retours
Paramètres
ForcedHome
6039
Sans
Sans
Home
6034
Sans
Paramètre 3 : Direction
Paramètre 4 : Vitesse
Unhome
6038
Sans
Sans
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Paramètres
DisableRollover
412
Sans
Sans
EnableRollover
411
Sans
Sans
GetRolloverLimit
1539
Retour 2 : Position
Paramètre 1 : Direction
GetUnrolledPosition
546
Retour 2 : Position
Sans
SetPosition
2053
Sans
Paramètre 3 : Position
SetRolloverLimit
2539
Sans
Paramètre 1 : Direction
Paramètre 3 : Position
35009561.01 07/2008
Annexes
Fonctions de
diagnostic
Fonctions de
configuration
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de diagnostic :
Fonction
Code
Retours
Paramètres
GetAxisId
523
Retour 1 : Identificateur
de l’axe
Sans
GetCombinedControl
1534
Renvoi 1 : Bits
Commande de
Mouvement
Sans
GetControl
1525
Renvoi 1 : Bits
Commande de
Mouvement
Sans
GetMotionFault
5510
Retour 1 : Liste des
défauts
Sans
GetMotionWarning
5511
Renvoi 1 : Liste des
avertissements
Sans
GetNumberInSet
541
Retour 1 : Nbre d’axes
Sans
GetSercosAddress
549
Retour 1 : Adresse
Paramètre 1 : Axe
Le tableau suivant donne la liste des fonctions de configuration :
Fonction
Code Retours
Paramètres
GetGearRatio
1500
Retour 2 : Numérateur
Retour 3 : Dénominateur
Sans
SetGearRatio
2500
Sans
Paramètre 3 : Numérateur
Paramètre 4 : Dénominateur
383
Annexes
Fonctions accessibles pour un groupe d’axes coordonnés
Fonctions de
commande de
mouvement
Fonctions de
mouvement
Fonctions de
réglage
384
Le tableau suivant donne la liste des fonctions de commande de mouvement :
Fonction
Code
Retours
Paramètres
Home
6034
Sans
Paramètre 3 : Direction
Paramètre 4 : Vitesse
Le tableau suivant donne la liste des fonctions de mouvement. Dans les fonctions
MoveImmed et MoveQueue, utilisez n registres (commençant au paramètre 3, où n
est le nombre d'axes du groupe coordonné) pour spécifier les positions de tous les
axes du groupe coordonné. Utilisez ensuite n registres supplémentaires
(commençant au paramètre n+3) pour spécifier les vitesses de tous les axes.
Fonction
Code
Retours
Paramètres
MoveImmed
513
Sans
Paramètre 1 : Type
Paramètre (2 + n) : Position
Paramètre (n + 3) -> (2n + 3) :
Vitesse
MoveQueue
520
Sans
Paramètre 1 : Type
Paramètre (2 + n) : Position
Paramètre (n + 3) -> (2n + 3) :
Vitesse
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Paramètres
GetActualSpeed
5065
Retour 1 : Vitesse
Sans
GetDefaultSpeed
1065
Retour 1 : Vitesse
Sans
GetSpeedOverride
1513
Retour 2 : Pourcentage
Sans
SetDefaultSpeed
2065
Sans
Paramètre 1 : Vitesse
SetSpeedOverride
2513
Sans
Paramètre 3 : Pourcentage
35009561.01 07/2008
Annexes
Fonctions de
diagnostic
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de diagnostic :
Fonction
Code
Retours
Paramètres
GetAxisId
523
Retour 1 : Identificateur de Sans
l’axe
GetCombinedControl
1534
Renvoi 1 : Bits Commande Sans
de Mouvement
GetControl
1525
Renvoi 1 : Bits Commande Sans
de Mouvement
GetMotionFault
5510
Retour 1 : Liste des
défauts
Sans
GetMotionWarning
5511
Renvoi 1 : Liste des
avertissements
Sans
GetMoveQueueLength
9510
Retour 1 : Longueur
Sans
385
Annexes
Fonctions accessibles pour un groupe d’axes suiveurs
Fonctions de
réglage
386
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Paramètres
DisableRollover
412
Sans
Sans
EnableRollover
411
Sans
Sans
GetAbsFollowerBias
1526
Retour 1 : Position
Paramètre 1 : Identificateur
de l’axe
GetCamProfile
1530
Retour 1 : Identificateur
du profil
Paramètre 1 : Identif. de l’axe
GetFollowerBias
1527
Retour 2 : Position
Paramètre 1 : Identif. de l’axe
GetFollowerMode
1529
Retour 1 : Mode suiveur
Paramètre 1 : Identif. de l’axe
GetFollowerRatio
1114
Retour 2 : Numérateur
Paramètre 1 : Identif. de l’axe
Retour 3 : Dénominateur
GetMasterOffset
1532
Retour 2 : Position
Paramètre 1 : Identif. de l’axe
GetSpeedOverride
1513
Retour 2 : Pourcentage
Sans
GetMasterTriggerPosition 1531
Retour 2 : Position
Paramètre 1 : Identif. de l’axe
SetFollowerRatio
2114
Sans
Paramètre 1 : Identif. de l’axe
Paramètre 3 : Numérateur
Paramètre 4 : Dénominateur
SetMasterOffset
2532
Sans
Paramètre 1 : Identif. de l’axe
Paramètre 3 : Position
SetMasterTriggerPosition 2531
Sans
Paramètre 1 : Identif. de l’axe
Paramètre 3 : Position
SetSpeedOverride
Sans
Paramètre 3 : Pourcentage
2513
35009561.01 07/2008
Annexes
Fonctions de
diagnostic
Fonctions de
configuration
35009561.01 07/2008
Le tableau suivant donne la liste des fonctions de diagnostic :
Fonction
Code
Retours
Paramètres
GetAxisId
523
Retour 1 : Identificateur de
l’axe
Sans
GetCombinedControl
1534
Renvoi 1 : Bits Commande
de Mouvement
Sans
GetControl
1525
Renvoi 1 : Bits Commande
de Mouvement
Sans
GetMotionFault
5510
Retour 1 : Liste des défauts Sans
GetMotionWarning
5511
Renvoi 1 : Liste des
avertissements
Sans
GetNumberInSet
541
Retour 1 : Nbre d’axes
Sans
Le tableau suivant donne la liste des fonctions de configuration :
Fonction
Code
Retours
Paramètres
GetMaster
1528
Retour 1 : identificateur de
l’axe
Sans
SetFollowerConfig
420
Sans
Paramètre 1 : Identif. de l’axe
Paramètre 2 : Mode suiveur
Paramètre 3 : Numérateur
ou Identif. du profil
Paramètre 4 : Dénominateur
SetMaster
2528
Sans
Paramètre 1 : Identif. de l’axe
387
Annexes
Fonctions accessibles pour un profil de came
Fonctions de
réglage
Fonctions de
configuration
388
Le tableau suivant donne la liste des fonctions de réglage :
Fonction
Code
Retours
Length
534
Retour 1 : Longueur de la Sans
table
Paramètres
LookUpFollowerPosition
537
Retour 2 : Position
esclave
Paramètre 3 : Position maître
Le tableau suivant donne la liste des fonctions de configuration :
Fonction
Code
Retours
GetCoord
532
Retour 1 : Position maître Paramètre 1 : Index de la table
Retour 2 : Position esclave
Paramètres
GetInterpType
530
Retour 1 : Type d’interpo.
Sans
SetCoord
533
Sans
Paramètre 1 : Index de la table
Paramètre 3 : Position maître
Paramètre 4 : Position esclave
SetInterpType
531
Sans
Paramètre 1 : Type d’interpo.
35009561.01 07/2008
Les fonctions spécifiques au
TSX CSY 164
III
Présentation
Objet de
l’intercalaire
Cet intercalaire décrit les nouvelles fonctions spécifiques au module TSX CSY 164.
Contenu de cette
partie
Cette partie contient les chapitres suivants :
35009561.01 07/2008
Chapitre
Titre du chapitre
Page
12
Compatibilité
391
13
Configuration du module TSX CSY 164
393
14
Fonctions spécifiques au TSX CSY 164
397
15
Performances du TSX CSY 164
407
389
Les fonctions spécifiques au TSX CSY 164
390
35009561.01 07/2008
Compatibilité
12
Compatibilité
Compatibilité
logicielle
z
z
35009561.01 07/2008
pour développer une application qui intègre les modules TSX CSY 164 le logiciel
PL7 Junior/Pro doit être de version minimum SV 4.3 + Add-on Motion
TSX CSY 164 ou SV ≥ 4.4,
pour un module TSX CSY 84, un program me est fonctionnellement compatible
avec un TSX CSY 164, aprés reconfiguration de l'application PL7.
391
Compatibilité
392
35009561.01 07/2008
Configuration du module
TSX CSY 164
13
Présentation
Objet du chapitre
Ce chapitre décrit les écrans de configuration du module TSX CSY 164 et des
différentes fonctions qu’il permet de réaliser : Fonctions "SERCOS®," "axe réel",
"axe imaginaire", ...
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Configuration du module TSX CSY 164
394
Configuration des voies
395
393
Configuration du module TSX CSY 164
Configuration du module TSX CSY 164
Introduction
Le mode Configuration permet de définir les caractéristiques de fonctionnement
pour chaque voie du module TSX CSY 164.
Ajout d’un
module
Dans la boîte de dialogue "Ajouter un module" de la famille "Mouvement"
sélectionner le module TSX CSY 164 :
Ajouter un module
Famille:
Module:
Analogique
1.5 TSX CAY 22
Communication1.5 TSX CAY 33
Comptage
1.5 TSX CAY 42
Déport BusX 1.0 TSX CAY 21
Mouvement 1.5 TSX CAY 41
Pesage
1.7 TSX CFY 11
Produits Tiers 1.0 TSX CFY 21
Simulation
1.0 TSX CSY 84
Tout ou Rien 1.5 TSX CSY 164
MOD.CDE AXE 2 VOIES
MOD.CDE AXE 3 VOIES
MOD.CDE AXE 4 VOIES
MOD.CDE AXE 2 VOIES
MOD.CDE AXE 4 VOIES
MOD.MOT.PAS A PAS 1 VOIE
MOD.MOT.PAS A PAS 2 VOIES
8 AXIS N4 MOTION.CONT
16 AXIS N4 MOTION.CONT
OK
Annuler
Se référer au chapitre "Configuration du module TSX CSY 84" (Voir Configuration
du module, p. 81).
394
35009561.01 07/2008
Configuration du module TSX CSY 164
Configuration des voies
Introduction
Configurer une voie consiste à définir les paramètres de la fonction métier associée
à cette voie :
z voie 0 : fonction SERCOS® (Voir Configuration de la fonction SERCOS® (voie
0), p. 84),
z voies 1 à 16 : axe indépendant (axe réel, axe imaginaire ou axe à mesure
externe),
z voies 17 à 20 : groupe d’axes coordonnés (Voir Configuration d’un groupe d’axes
coordonnés (voies 17 à 20), p. 92),
z voies 21 à 24 : groupe d’axes suiveurs (Voir Configuration d’un groupe d’axes
suiveurs (voies 21 à 24), p. 93),
z voies 25 à 31 : profil de came (Voir Configuration d’un profil de came, p. 96).
Illustration
TSX CSY 164 [RACK0 POSITION 3]
Configuration
Désignation :MOD.CDE AXE 16VOIES
Symbole :
Voie :
1 Axe indépendant
Voies configurées :
0, 1, 14, 15, 17,
35009561.01 07/2008
Fonction :
(aucune)
Axe réel
Axe imaginaire
Axe à mesure externe
Tâche :
MAST
395
Configuration du module TSX CSY 164
Configuration
d’un axe
indépendant
Un axe indépendant (voies 1 à 16) peut indifférement supporter, soit une fonction
axe réel, soit une fonction axe imaginaire, soit une fonction consigne externe :
z la configuration d’un axe réel va permettre de piloter un axe physique (qui utilise
un variateur de vitesse). Dans ce cas, il est nécessaire d’assurer une certaine
cohérence entre les paramètres saisis dans l’écran de configuration du module
TSX CSY 164 et ceux et ceux définis lors de la configuration du variateur de
vitesse,
z un axe imaginaire peut par exemple servir d’axe maître dans un groupe d’axes
suiveurs. Tous les paramètres d’un tel axe sont définis dans les écrans de
configuration du module de commande d’axes,
z une voie de mesure externe permet de remonter au module une information de
position externe. Configurer une mesure externe revient à configurer un axe réel
ou un axe imaginaire dans lequel seule l’information de position est valide.
Configuration d’
axes coordonnés
Les voies 17 à 20 (groupe d’axes coordonnés) sur le TSX CSY 84 permettent
d’utiliser les services suivants :
z WRITE_CMD,
z READ_STS.
Sur le TSX CSY 164, une nouvelle commande est ajoutées :
z MOD_PARAM (Voir Reconfiguration dynamique des groupes, p. 398).
Configuration d’
axes suiveurs
Les voies 21 à 24 (groupe d’axes suiveurs) sur le TSX CSY 84 permettent d’utiliser
les services suivants :
z READ_PARAM
z WRITE_PARAM
z WRITE_CMD (sauf Move),
z SAVE_PARAM
z RESTORE_PARAM
z READ_STS.
Sur le TSX CSY 164, une nouvelle commande est ajoutées :
z MOD_PARAM (Voir Reconfiguration dynamique des groupes, p. 398).
396
35009561.01 07/2008
Fonctions spécifiques au
TSX CSY 164
14
Présentation
Objet de ce
chapitre
Ce chapitre décrit les nouvelles fonctions associées au module TSX CSY 164.
Contenu de ce
chapitre
Ce chapitre contient les sujets suivants :
35009561.01 07/2008
Sujet
Page
Reconfiguration dynamique des groupes
398
Fonction de surveillance des écarts de position entre axes
401
397
Fonctions spécifiques au TSX CSY 164
Reconfiguration dynamique des groupes
Description
Une nouvelle commande est disponible sur les groupes suiveurs et coordonnés
afin de pouvoir par programme changer les axes membres du groupe.
Cette commande aura les mêmes effets qu’une reconfiguration en mode connecté
(arrêt d’urgence de la voie).
Elle permettra :
z le changement à la volée du maitre d’un groupe suiveur,
z le changement des axes membres d’un groupe
Syntaxe de l'instruction MOD_PARAM :
MOD_PARAM %CHxy,i : écriture des mots de réglage %Mx du groupe i, du module
situé à l'adresse xy (numéro de rack, position dans le rack).
ex : écriture paramètres mode suiveur : écriture du groupe suiveur 24 situé dans
l'emplacement adresse 4 .
IF %M38 THEN
MOD_PARAM %CH4.24(0,0,0,0);
RESET %M38;
END_IF;
z
Contrôle des échanges :
Les deux bits suivants peuvent être utilisés pour contrôler l'écriture dans les mots
de configuration .
%MWxy,i,0:x15 : ce bit est positionné a 1 lorsque l'échange est en cours . Il est
remis à 0 lorsque l'échange est terminé,
%MWxy,i,1:x15 : ce bit est positionné à 1 lorsque l'échange est erroné ( Paramètres
hors bornes ect ..)
z
Sous PL7, cette fonction s’écrit :
z Mod_Param % CHxy.i (0,0,0,0);
Les paramètres entre parenthèse sont toujours égales à 0.
Cette fonction utilisera les mots (%MW) de paramètre comme interface.
398
35009561.01 07/2008
Fonctions spécifiques au TSX CSY 164
Objets Language
associés
Cette fonction utilisera les %MW de paramètre comme interface. A l'appel de cette
fonction les %MW seront recopiés dans les constantes (%KW) puis le groupe
effectuera une reconfiguration.
Cas des groupes suiveurs :
Mots mémoire
source
Mnémoniques mots
mémoire source
Mots constants destination Commentaires
%MWx.y.36
_SLAVE_CHANNEL_1
%KWx.y.3
Numéro de l'axe esclave 1 du
groupe suiveur
%MWx.y.37
_FOLL_DESCRIPTION_1
%KWx.y.4
Définition de l'axe esclave 1 du
groupe suiveur
%MWx.y.44
_SLAVE_CHANNEL_2
%KWx.y.11
Numéro de l'axe esclave 2 du
groupe suiveur
%MWx.y.45
_FOLL_DESCRIPTION_2
%KWx.y.12
Définition de l'axe esclave 2 du
groupe suiveur
%MWx.y.52
_SLAVE_CHANNEL_3
%KWx.y.19
Numéro de l'axe esclave 3 du
groupe suiveur
%MWx.y.53
_FOLL_DESCRIPTION_3
%KWx.y.20
Définition de l'axe esclave 3 du
groupe suiveur
%MWx.y.60
_SLAVE_CHANNEL_4
%KWx.y.27
Numéro de l'axe esclave 4 du
groupe suiveur
%MWx.y.61
_FOLL_DESCRIPTION_4
%KWx.y.28
Définition de l'axe esclave 4 du
groupe suiveur
%MWx.y.68
_SLAVE_CHANNEL_5
%KWx.y.35
Numéro de l'axe esclave 5 du
groupe suiveur
%MWx.y.69
_FOLL_DESCRIPTION_5
%KWx.y.36
Définition de l'axe esclave 5 du
groupe suiveur
%MWx.y.76
_SLAVE_CHANNEL_6
%KWx.y.43
Numéro de l'axe esclave 6 du
groupe suiveur
%MWx.y.77
_FOLL_DESCRIPTION_6
%KWx.y.44
Définition de l'axe esclave 6 du
groupe suiveur
Cas des groupes coordonné : l'ajout de la fonction Mod_Param impose de rajouter
à l'interface langage les %mW suivants :
35009561.01 07/2008
Mots mémoire
source
Mots constants destination Commentaires
%MWx.y.63
%KWx.y.4
Numéro de l'axe membre 0 du groupe
coordonné
%MWx.y.64
%KWx.y.5
Numéro de l'axe membre 1 du groupe
coordonné
399
Fonctions spécifiques au TSX CSY 164
Mots mémoire
source
Mots constants destination Commentaires
%MWx.y.65
%KWx.y.6
Numéro de l'axe membre 2 du groupe
coordonné
%MWx.y.66
%KWx.y.7
Numéro de l'axe membre 3 du groupe
coordonné
%MWx.y.67
%KWx.y.8
Numéro de l'axe membre 4 du groupe
coordonné
%MWx.y.68
%KWx.y.9
Numéro de l'axe membre 5 du groupe
coordonné
%MWx.y.69
%KWx.y.10
Numéro de l'axe membre 6 du groupe
coordonné
%MWx.y.70
%KWx.y.11
Numéro de l'axe membre 7 du groupe
coordonné
A l’appel de cette fonction les mots (%MW) seront recopiés dans les constantes
(%KW) puis le groupe effectuera une reconfiguration
Le contenu de ces %MW donne le numéro de voie métier de tous les axes membres
du groupe coordonné.
400
35009561.01 07/2008
Fonctions spécifiques au TSX CSY 164
Fonction de surveillance des écarts de position entre axes
Description
35009561.01 07/2008
La fonction de surveillance des écarts de position entre axes permet de surveiller
des écarts entre des axes indépendants (réel, imaginaire ou consigne externe)
quelconques du module.
Cette fonction pourra être instanciée plusieurs fois avec des listes d’axes
différentes.
La fonction sera assurée par 3 opcodes :
z lancement de la surveillance,
z relecture des paramètres de la fonction,
z arrêt de la surveillance.
401
Fonctions spécifiques au TSX CSY 164
Lancement de la
surveillance
Permet de démarrer la surveillance par l’appel d’une fonction TRF_RECIPE
(opcode 26200) sur la voie 0.
A l’appel de la fonction le module fait une photographie des différentes positions des
axes à surveiller puis :
z si 2 axes ont un déplacement divergent de plus que le seuil d’alarme, le module
déclenche un warning sur les deux axes fautifs,
z si 2 axes ont un déplacement divergent de plus que le seuil défaut, le module
déclenche un défaut sur les deux axes fautifs, arrête tous les axes de la liste et
déclenche un warning sur les axes non fautifs.
Objet
Type
Explication
Commentaire
%MF xy.0.15
Flottant
Numéro d’instance
Paramètre du TRF_RECIPE,
transformé en entier par le
module
%MF i
Flottant
Seuil d’alarme
En unité de position de l’axe de
référence
%MF i+2
Flottant
Seuil de défaut
En unité de position de l’axe de
référence
%MW i+4
Mot
Axe de réference
%MW i+5
Mot
Axe 1
%MF i+6
Flottant
Numérateur Axe 1
%MF i+8
Flottant
Dénominateur Axe 1
.. .. ..
..
..
%MW i+5+5(N-1)
Mot
Axe N
%MF i+5+5(N-1)+1
Flottant
Numérateur Axe N
%MF i+5+5(N-1)+3
Flottant
Dénominateur Axe N
Exemple :
Surveillance des axes 8, 12 et 7 :
z l'axe 8 est configuré en mm,
z l'axe 12 est configuré en °. Il fait 4° quand l'axe 8 fait 1 mm,
z l'axe 7 est configuré en tours. Il fait 1 tour quand l'axe 8 fait 10 mm.
Le seuil d'alarme est de 4 mm.
Le seuil de défaut est de 10 mm.
IF %MW104.0.0: X3 = 0 THEN
%MW104.0.10 := 26200;
%MF104.0.15 := 1.0;
%MF150 :=4.0;
%MF152 := 10.0;
402
(* pas de TRF_RECIPE en cours *)
(* Action 26200 = GAP_CONTROL *)
(* Numéro d'instance *
(* Seuil d'alarme *)
(* Seuil de défaut *)
35009561.01 07/2008
Fonctions spécifiques au TSX CSY 164
%MW154 := 8;
%MW155 := 12;
%MF156 := 4.0.0;
2eme axe et l'axe de
%MF158 := 1.0;
le 2eme axe et l'axe
%MW160 :=7.0;
%MF161 := 1.0;
le 3eme axe et l'axe
%MF163 := 10.0;
le 3eme axe et l'axe
TRF_RECIPE %CH 104.0
END_IF;
(* Axe de référence *)
(* Deuxième axe à surveiller *)
(* Numérateur du rapport entre le
référence *)
(* Dénominateur du rapport entre
de référence *)
(* Troisième axe à surveiller *)
(* Numérateur du rapport entre
de référence *)
(* Dénominateur du rapport entre
de référence *)
(15,150);
Une alarme sera déclenchée si l'axe 8 se déplace de 5 mm alors que l'axe 12 n'a
bougé que de 4°.
Un défaut sera déclenché si l'axe 8 se déplace de 20 mm alors que l'axe 12 n'a
bougé que de 4°.
Cas de refus du TRF_RECIPE 26200 : erreur sur le mot %MWxy.0.3
z la taille des données (premier paramètre du TRF_RECIPE) est incorrecte =>
code d’erreur 23,
z le numéro d’instance est incorrect => code d’erreur 10. Le numéro d’instance doit
être compris entre 0 et 7 soit 8 instances simultanées au maximum,
z l’instance est déjà active => code d’erreur 64,
z le seuil d’alarme est supérieur au seuil de défaut => code d’erreur 65,
z un des seuils est négatif => code d’erreur 66,
z un des axes à surveiller correspond à un axe configuré ni en réel, ni en imaginaire
et ni en consigne externe => code d’erreur 37,
z un des dénominateur est nul => code d’erreur 67.
35009561.01 07/2008
403
Fonctions spécifiques au TSX CSY 164
Relecture des
paramètres de la
fonction
Permet de relire les paramètres de surveillance d'une instance donnée, par l'appel
d'une fonction TRF_RECIPE (opcode 16200) sur la voie 0.
Le résultat de la fonction sera lisible sur des %M banalisés.
Objet
Type
Explication
Commentaire
%MF i
Flottant
Seuil d’alarme
En unité de position de l’axe de
référence
%MF i+2
Flottant
Seuil de défaut
En unité de position de l’axe de
référence
%MW i+4
Mot
Axe de réference
%MW i+5
Mot
Axe 1
%MF i+6
Flottant
Numérateur Axe 1
%MF i+8
Flottant
Dénominateur Axe 1
.. .. ..
..
..
%MW i+5+5(N-1)
Mot
Axe N
%MF i+5+5(N-1)+1
Flottant
Numérateur Axe N
%MF i+5+5(N-1)+3
Flottant
Dénominateur Axe N
Exemple :
IF %MW104.0.0:
%MW104.0.10 :=
%MF104.0.15 :=
TRF_RECIPE %CH
END_IF;
X3 = 0 THEN (* Pas de TRF_RECIPE en cours*)
16200;
(* Action 26200 = GAP_CONTROL*)
1.0
(* Instance à relire*)
104.0 (15,150);
Cas de refus du TRF_RECIPE 16200 : erreur sur le mot %MWxy.0.3 ;
la taille des données (premier paramètre du TRF_RECIPE) est incorrecte =>
code d’erreur 23,
z le numéro d’instance est incorrect => code d’erreur 10. Le numéro d’instance doit
être compris entre 0 et 7 soit 8 instances simultanées au maximum,
z l’instance n’est pas active => code d’erreur 68.
z
404
35009561.01 07/2008
Fonctions spécifiques au TSX CSY 164
Arrêt de la
surveillance
Permet de supprimer la surveillance d'une instance donnée, par l'appel d'une
fonction TRF_RECIPE (opcode 14200) sur la voie 0.
Exemple:
IF %MW104.0.0:
%MW104.0.10 :=
%MF104.0.15 :=
TRF_RECIPE %CH
END_IF;
X3 = 0 THEN (* Pas de TRF_RECIPE en cours *)
14200;
(* Action 14200 = GAP_CONTROL *)
1.0
(* Instance à supprimer*)
104.0 (0,0);
Cas de refus du TRF_RECIPE 14200 : erreur sur le mot %MWxy.0.3 ;
z le numéro d’instance est incorrect => code d’erreur 10. Le numéro d’instance doit
être compris entre 0 et 7 soit 8 instances simultanées au maximum,
z l’instance n’est pas active => code d’erreur 68.
Contrôle de
l’activité de la
fonction de
surveillance
Permet de contrôler si une instance est active ou inactive, par l'appel d'une fonction
TRF_RECIPE (opcode 16201) sur la voie 0.
Le résultat de la fonction est lisible sur un %MW banalisé :
TRF_RECIPE %CH4.0(1,150)
avec 1= longueur et 150 = offset retour.
Chaque bit du premier octet est l'image de l'activité de l'instance correspondante
(exemple : Bit 0 => Instance 0 etc....)
z 1=> instance active,
z 0 => instance inactive.
Exemple : l’instance est t’elle active?
IF %M9 AND NOT %MW4.0:X3 THEN
%MW4.0.10:=16201;
TRF_RECIPE %CH4.0(1,150);
RESET %M9;
END_IF;
Le résultat est accessible sur le mot %MW150 .
Si %MW150 = 3 les instances 0 et 1 sont actives.
Cas refus : erreur sur mot %MWxy,i,3 :
z si la longueur à lire est différente de 1==> Code d'erreur 22,
z si la longueur est supérieure au nombre de mots (%MW ) configuré ==> Code
d'erreur 19.
35009561.01 07/2008
405
Fonctions spécifiques au TSX CSY 164
406
35009561.01 07/2008
Performances du TSX CSY 164
15
Performances du module TSX CSY 164
35009561.01 07/2008
407
Performances du TSX CSY 164
Présentation
Les performances du module sont :
temps de cycle SERCOS®® :
z Tic SERCOS® égale à 4 ms par défaut.
z traitement d’une commande immédiate = 2 Tic SERCOS®,
z traitement d’une commande en file = 2 Tic SERCOS® * Nombre commande en
file,
z traitement de la mesure Remote = 2 Tic SERCOS® + 1 Tic SERCOS® pour la
prise en compte de la commande de référence sur l’esclave,
z période de la surveillance des écarts entre axes : 20 ms indépendant du Tic,
z modification à la volée du temps de cycle via la commande Write-cycle au choix :
z Tic SERCOS® à 2 ms,
z Tic SERCOS® à 3 ms,
z Tic SERCOS® à 4 ms,
avec prise en compte lors du forçage en phase 0 de l’anneau SERCOS®.
Le Tic SERCOS® est définit en fonction du nombre d’axes configurés et du type
d’applications (voir Guide de choix du temps de cycle SERCOS®).
z
Note : le Lexium réalise une interpolation toutes les 250 μs.
Guide de choix du temps de cycle SERCOS®® :
Performances du TSX CSY 164
Temps de cycle SERCOS® (ms)
5
4,5
4
3,5
3
Axes indépendants
2,5
Axes coordonnés
2
Axes suiveurs
1,5
1
0,5
0
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16
Nombre d’axes
Conditions de test :
408
35009561.01 07/2008
Performances du TSX CSY 164
Attention : les performances annoncées sont réalisées sous certaines conditions
en garantissant une réserve de temps de l’ordre de 25% du temps CPU SERCOS®.
La Période de la tâche MAST est configurée à 20ms. L’envoi des commandes de
mouvements via MOVE_QUEUE est réalisée une fois tous les 10 cycles automates.
En conséquence,
z pour la configuration "axes indépendants" : on envoie un MOVE_QUEUE à tous
les axes toutes les 200ms,
z pour la configuration "axes suiveurs", on envoie un MOVE_QUEUE au maître
toutes les 200ms,
z pour la configuration "axes coordonnés" on envoie un MOVE_QUEUE à tous les
groupes coordonnés toutes les 200ms.
Un WRITE_PARAM est envoyé durant ce laps de temps, afin d’effectuer un réglage
d’un paramètre.
35009561.01 07/2008
409
Performances du TSX CSY 164
Modification par
programme du
temps de cycle
(* changement du tps de cycle SERCOS® => %MW30 = 2000 ou 3000
ou 4000 *)
IF %M30 THEN %MW101.0.26:=2565;
%MD101.0.27:=%MW30;
IF NOT %MW101.0:X1 THEN
WRITE_CMD %CH101.0;
RESET %M30;
SET %M31;
END_IF;
END_IF;
(* passage en phase SERCOS® 0 *)
IF %M31 THEN %MW101.0.26:=2545;
%MD101.0.27:=0;
IF NOT %MW101.0:X1 THEN
WRITE_CMD %CH101.0;
RESET %M31;
SET %M32;
END_IF;
END_IF;
(* Repassage en phase SERCOS® 4 *)
IF %M32 THEN %MW101.0.26:=2545;
%MD101.0.27:=4;
IF NOT %MW101.0:X1 THEN
WRITE_CMD %CH101.0;
RESET %M32;
END_IF;
END_IF;
(* ici on peut attendre le passage en phase 4 (OPCODE 550
résultat dans %MD101.0.20) puis acquitter le defaut induit par
le passage en phase 0 *)
410
35009561.01 07/2008
B
AC
Index
A
B
ABS_MOVE, 151
ABS_MOVE_NEG, 151
ABS_MOVE_POS, 151
Accès au paramétrage du module
Module SERCOS®, 81, 394
ACTION_CMD, 349
Activation des voyants
Module SERCOS®, 333
Architecture SERCOS, 20
AvertissementMouvement, 314
Axe X à Axe E
Module SERCOS®, 92
AXIS_AT_TARGET, 120
AXIS_COMM_OK, 118
AXIS_FASTSTOP, 131
AXIS_HALT, 130
AXIS_HOLD, 129
AXIS_HOMED, 108
AXIS_HOMING, 107
AXIS_IN_COMMAND, 123
AXIS_IS_LINKED, 119
AXIS_MANUAL_MODE, 126
Axis_Manual_Mode, 143
AXIS_NEG_LIMIT, 122
AXIS_NOT_FOLLOWING, 109
AXIS_POS_LIMIT, 121
AXIS_READY, 132
AXIS_SUMMARY_FAULT, 117, 333
AXIS_WARNING, 124
BIAS_REMAIN, 125
Bit ALLOW, 136
Bit CONTROL, 136
Bit et mot d’entrée
Module SERCOS®, 356
Bit et mot de sortie
Module SERCOS®, 359
Bits ALLOW, 137
Bits CONTROL, 138
Butées
Module SERCOS(r), 85, 395
35009561.01 07/2008
C
Calcul de trajectoire
Module SERCOS®, 20
Came
Module SERCOS®, 77
Coefficient de modulation de vitesse
Module SERCOS(r), 67
Module SERCOS®, 159
CommandeMouvement, 137
CONF_OK, 133
Configuration d’un profil de came
Module SERCOS®, 96
Configuration des axes, 41
Module SERCOS®, 40
Configuration du module
Module SERCOS®, 81, 394
Connexion au variateur de vitesse
Module SERCOS®, 39
411
Index
CONT_MOVE, 151
Contrôle de position en validation
Module SERCOS(r), 85, 395
D
Débit
Module SERCOS®, 84
Déclaration du module
Module SERCOS®, 81, 394
Défaut module, 293
Module SERCOS®, 306
Défaut voie, 294
Module SERCOS®, 306
Défauts module
Module SERCOS®, 316
Défauts variateur, 335
Défauts voie
Module SERCOS®, 317
Diagnostic module, 293
Diagnostic voie, 294
Données cycliques
Module SERCOS®, 18
Données non cycliques
Module SERCOS®, 18
DRIVE_DIAG, 113
DRIVE_DISABLED, 116
DRIVE_ENABLED, 112
DRIVE_FAULT, 115
DRIVE_REALTIME_BIT1, 127
DRIVE_REALTIME_BIT2, 128
DRIVE_WARNING, 114
E
Erreurs de programmation
Module SERCOS®, 325
Esclave
Module SERCOS®, 93
EtatMouvement, 307
F
Facteur d’échelle
Module SERCOS(r), 85, 395
Module SERCOS®, 90
412
Fonction "axe à mesure externe
Module SERCOS(r), 69
Fonction "axe imaginaire"
Module SERCOS(r), 68
Fonction "axe réel"
Modules SERCOS(r), 67
Fonction "groupe d’axes coordonnées"
Module SERCOS®, 72
Fonction "Groupe d’axes suiveurs"
Module SERCOS®, 75
Fonction "profil de came"
Module SERCOS®, 77
Fonction "SERCOS®", 66
Fonction spéciale
Module SERCOS®, 92
Fonctions de commande de mouvement
Module SERCOS®, 373, 375, 379, 382,
384, 386
Fonctions de configuration
Module SERCOS®, 375, 382, 386, 388
Fonctions de diagnostic
Module SERCOS®, 373, 375, 382, 384,
386
Fonctions de lecture et d’écriture des
paramètres IDN, 373, 375
Fonctions de mouvement
Module SERCOS®, 375, 379, 384
Fonctions de réglage
Module SERCOS®, 373, 375, 379, 382,
384, 386, 388
ForcedHomed, 147
G
GetActualPhase, 298
GetActualSpeed, 168
GetCommandedPosition, 173
GetCommandPhase, 299
GetCommandSpeed, 169
GetMotionFault, 310
GetMotionWarning, 314
GetMoveQueueLength, 158
GetNumberInSet, 304
GetNumberOfDrivesInRing, 302
GetSercosAddress, 301
GetSpeedOverride, 159
35009561.01 07/2008
Index
GetUnrolledCommandedPosition, 172
GetUnrolledPosition, 171
H
HOLDING, 110
Home, 144, 146
I
IDN, 18
IN_POSITION, 106
INCR_MOVE, 151
Incrément esclave
Module SERCOS®, 96
Incrément maître
Module SERCOS®, 96
Instruction
TRF_RECIPE, 259
Interpolation
Module SERCOS®, 77
IsLoopUp, 303
L
Liaison numérique
Module SERCOS®, 18
M
Maître
Module SERCOS®, 93
Mesure externe
Module SERCOS(r), 69
Mise au point
Commande manuelle, 288
Diagnostic, 282
Ecran
Généralités, 276
Envoi de commande, 287
Mouvement, 285
Position, 292
Référence, 289
Suivi, 290
Validation, 280
Variateur, 291
Mise en oeuvre d’un axe imaginaire
Module SERCOS®, 30
Mise en oeuvre d’un axe réel
Module SERCOS®, 30
Mise en oeuvre d’une entrée de mesure
externe
Module SERCOS®, 30
Mode came
Module SERCOS®, 75
mode manuel, 140
Mode ratio
Module SERCOS®, 75
Modes de marche, 19
Module SERCOS®, 18
ModeSuiveur
Module SERCOS®, 231
Modulo
Module SERCOS®, 214
Mouvement
Module SERCOS(r), 85, 395
Movelmmed, 154
MoveQueue, 156
N
norme EN 61491, 17
O
Offre Premium
Module SERCOS®, 20
Optimisation des performances
Module SERCOS®, 64
P
PARAM_CMD, 349
35009561.01 07/2008
413
Index
Paramètre Accélération/Déccélération
Accel, 203
AccelMax, 205
AccelType, 207
DecelMax, 206
Paramètre Limite de position
InPositionBand, 219
Paramètre Limite de position et Modulo
EnableRollover, 217
PositionLimit, 212
RolloverLimit, 216
Paramètre Vitesse
DefaultSpeed, 200
SpeedLimit, 201
Paramètres constructeur
Module SERCOS®, 84
Paramètres d’un groupe suiveur
AbsFollowerBias, 244
FollowerBias, 243
FollowerConfig, 233
FollowerMode, 232
MasterOffset, 239
MasterTriggerPosition, 241
Paramètres d’un profil de came
Coord, 253
InterpType, 255
Length, 251
LookUpFollowerPosition, 252
ProfileId, 256
Paramètres de l’anneau Sercos
OpticalPower, 264
Paramètres des variateurs de vitesse
Module SERCOS®, 345
Paramètres du module de commande d’axes
Module SERCOS®, 345
Paramètres résolution
GearRatio, 210
Paramètres Variateurs
IDN_P, 266
IDN_S, 266
IDN_UP, 268
IDN_US, 268
Présymbolisation
Module SERCOS®, 80
PROFILE_END, 105
414
Puissance optique
Module SERCOS®, 84
R
RAMPING, 102
READ_PARAM, 347
READ_STS, 353
RealTimeCtrlBit, 160
Réglage
Ecran
Anneau SERCOS®, 262
Axes à mesure externe, 193
Axes réels ou imaginaires, 191
Axes suiveurs, 226
Généralités, 187
Fonction TRF_RECIPE, 195, 257
Réglage d’un axe indépendant
Module SERCOS®, 363, 366
Réglage de la fonction SERCOS®, 362
REMOTE_POSITION, 69
RESTORE_PARAM, 348
RESUMING, 111
RETURN_CMD, 349
S
Saisie des symboles
Module SERCOS®, 43
SAVE_PARAM, 348
Set_Functional_Mode, 143
SetCommandPhase, 299
SetPosition, 149
SetSpeedOverride, 159
STEADY, 103
STOPPING, 104
Suivi sur arrêt et bias
Module SERCOS®, 75
Suppression d’un module
Module SERCOS®, 81, 394
Symboles des variables internes
Module SERCOS®, 43
Syntaxe des symboles
Module SERCOS®, 80
35009561.01 07/2008
Index
T
Tâche MAST
Module SERCOS®, 64
Temps de cycle
Module SERCOS®, 84
TRF_RECIPE, 195, 257, 259
TypeAccélération, 209
U
Unhome, 148
Unités, 85, 90, 395
V
Variateurs de vitesse
Modules SERCOS(r), 67
Vitesse de référence
Module SERCOS®, 72
Vitesse tangentielle
Module SERCOS®, 72
Voie 0
Module SERCOS®, 66
W
WRITE_CMD, 349
WRITE_PARAM, 347
35009561.01 07/2008
415
Index
416
35009561.01 07/2008
">
/
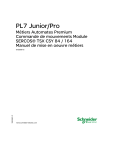
Descargar
Solo un recordatorio amistoso. Puedes ver el documento aquí mismo. Pero lo más importante es que nuestra IA ya lo ha leído. Puede explicar cosas complejas en términos sencillos, responder a tus preguntas en cualquier idioma y ayudarte a navegar rápidamente incluso por los documentos más largos o complicados.
Enlace público actualizado
Se ha actualizado el enlace público a tu chat. Puedes ver y gestionar tus enlaces de chat después del registro aquí.
