DITEC LOGICM IP1854 Installation manuel
PDF
Documento
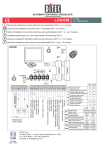
LOGICM I IP1854 rev. 2006-09-06 Manuale di installazione quadro elettronico per automazione 230 V~ a 1 o 2 motori. GB Control panel installation manual for 230 V~ automation with 1 or 2 motors. F Notice d’installation d’une armoire électrique pour automatisation 230 V~ à 1 ou 2 moteures. D Installationsanleitung für ein- oder zweimotorigen Torsteuerung 230 V~. E Manual de instalación del tablero eléctrico para automación 230 V~ a 1 o 2 motores. P Manual de instalação quadro eléctrico para automação 230 V~ com 1 o 2 motores. LOGICM F2 JR4 JR10 SO NIO D5 S5 JT 3 4 OFF F1 POWER SA IN 11 12 JR6 L N UW V X Z Y TM TC 1 2 3 4 5 6 RP TR R1 OPEN 1 EO ON OPEN 5 2 RF OM J7 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 TM TR Chiusura automatica / Automatic closing Apertura / Opening Chiusura / Closing Passo-passo / Step by step Sicurezza in apertura / Safety while opening Sicurezza in chiusura / Safety while closing Riapertura di sicurezza / Reversal safety contact Stop Apertura parziale / Partial opening Safety test Alimentazione Power supply Uscita / Output 24 V= / 0,5 A + L N M2 1~ RF Elettroserratura / Electric lock Lampeggiante / Flashing light Lampada / Lamp Finecorsa / Limit switch Finecorsa / Limit switch M1 1~ com com Lampeggiante Flashing light TC R1 RP DIP1 DIP2 DIP3 DIP4 DIP5 DIP6 DITEC S.p.A. Via Mons. Banfi, 3 - 21042 Caronno Pertusella (VA) - ITALY Tel. +39 02 963911 - Fax +39 02 9650314 www.ditec.it - ditec@ditecva.com MIN MAX Tempo manovra 10 s 120 s Operation time Tempo ritardo chiusura M1 0s 30 s Closing delay time M1 Tempo chiusura automatica 0 s 120 s Automatic closure time Regolazione forza 1 5 Power adjustment Spinta sugli ostacoli min max Thrust on obstacles Apertura parziale 0s 30 s Partial opening OFF Modalità radio passo-passo step by step Radio mode Senso apertura destra Opening direction right Rinnovo tempo chiusura aut. 50% Aut. closure time renewal Stato all’accensione aperto State of automation at start open Sblocco elettroserratura disabilitato Electric lock release disabled Prelampeggio disabilitato Pre-operation flashing light disabled ON apertura opening sinistra left 100% chiuso close abilitato enabled abilitato enabled Le présent manuel d’installation s’adresse exclusivement à un personnel qualifié. L’installation, les branchements électriques et les réglages doivent être effectués conformément à la bonne pratique et aux normes en vigueur. Lire attentivement les instructions avant de commencer l’installation du produit. Une mauvaise installation peut être source de danger. Ne pas jeter dans la nature les matériaux qui composent l’emballage (plastique, polystyrène, etc.) et ne pas les laisser à la portée des enfants car ils sont une source potentielle de danger. Avant de commencer l’installation, vérifier l’intégrité du produit. Ne pas installer le produit en atmosphère et environnement explosifs: la présence de gaz ou de fumées inflammables constitue un grave danger pour la sécurité. Les dispositifs de sécurité (cellules photoélectriques, bourrelets sensibles, arrêt d’urgence, etc.) doivent être installés en tenant compte: des réglementations et directives en vigueur, des règles de la bonne pratique, de l’environnement d’installation, de la logique de fonctionnement du système et des forces développées par la porte ou le portail motorisé. Avant de mettre sous tension, s’assurer que les données figurant sur la plaque signalétique correspondent à celles du secteur. Prévoir sur le réseau d’alimentation un disjoncteur/sectionneur omnipolaire avec distance d’ouverture des contacts égale ou supérieure à 3 mm. Contrôler si en amont de l’installation électrique il y a un disjoncteur différentiel et une protection contre les surtensions appropriées. Si nécessaire, raccorder la porte ou le portail motorisé à une installation de mise à la terre réalisée conformément aux prescriptions des normes de sécurité en vigueur. Au cours des interventions d’installation, entretien et réparation, couper l’alimentation avant d’ouvrir le couvercle pour accéder aux parties électriques. N’effectuer la manipulation des parties électroniques qu’après s’être muni de bracelets conducteurs antistatiques reliés à la terre. Le fabricant de la motorisation décline toute responsabilité quant à la sécurité et au bon fonctionnement si des composants incompatibles sont installés. En cas de réparation ou de remplacement des produits, utiliser exclusivement les pièces de rechange DITEC. DONNEES TECHNIQUES Alimentation Fusible F1 Fusible F2 Sortie 1 moteur Sortie 2 moteurs Alimentation accessoires Temperature Degré de protection Dimensions APPLICATIONS Fixer le coffret électrique à demeure. Percer la caisse du coffret électrique dans la partie inférieure pour le passage des câbles. S’ils sont accessibles, bloquer les câbles au moyens de serrecâbles prévus à cet effet (non fournis). Garder un espace (d’au moins 8 mm) entre les conducteurs de ligne et les conducteurs commandes et moteur dans les points de connexions aux boîtes à borne (en utilisant des colliers, par exemple). Relier les conducteurs de protection (couleur jaune/vert) de la ligne, du transformateur et de l’armoire de commande en se servant du dispositif de serrage fourni. Au terme de l’installation refermer le récipient. DECLARATION CE DE CONFORMITE Fabricant: Adresse: DITEC S.p.A. via Mons. Banfi, 3 21042 Caronno P.lla (VA) – ITALY Déclare ci-après que l’armoire electrique LOGICM est conformé aux dispositions des directives CEE suivantes: Directive basse tension 73/23/CEE; Directive EMC 89/336/CEE. LOGICM - IP1854 164 187 105 CONSEILS POUR L’INSTALLATION Caronno Pertusella, 06-09-2006 261 CONSIGNES GENERALES DE SECURITE 238 F Fermo Bressanini (Président) 20 LOGICM LOGICMJ 230 V~ / 50Hz 120 V~ / 60Hz F6,3A F6,3A F3,15A F3,15A 230 V~ / 5 A max 120 V~ / 6,3 A max 230 V~ 120 V~ 2 x 2,5 A max 2 x 3,15 A max 24 V= / 0,5 A 24 V= / 0,5 A -20° C / +55° C IP55 187x261x105 -20° C / +55° C IP55 187x261x105 1. RACCORDEMENTS ÉLECTRIQUES F 1.1 Commandes 1 1 1 1 Commande 2 3 4 5 N.O. N.O. N.O. N.O. 41 6 N.C. 41 7 N.C. 41 8 N.C. 1 9 N.C. 1 9 N.O. 1 20 0 11 N.C. 0 11 N.O. 0 12 N.C. 12 N.O. TM=MAX Fonction FERMETURE AUTOMATIQUE OUVERTURE FERMETURE PAS-A-PAS Description La fermeture permanente du contact habilite la fermeture automatique. La fermeture du contact active la manoeuvre d’ouverture. La fermeture du contact active la manoeuvre de fermeture. Avec D5=ON la fermeture du contact active une manoeuvre séquentielle d’ouverture ou de fermeture: ouverture-stop-fermeture-ouverture. Avec D5=OFF la fermeture du contact active une manoeuvre séquentielle d’ouverture ou de fermeture: ouverture-stop-fermeturestop-ouverture. Remarque: si la fermeture automatique est activée, avec S5=ON l’arrêt n’est pas permanent mais sa durée est programmée par TC, avec S5=OFF l’arrêt est permanent. SECURITE EN OUVERTURE L’ouverture du contact de sécurité arrête et empêche la manoeuvre d’ouverture. SECURITE EN FERMETURE L’ouverture du contact de sécurité arrête et empêche la manoeuvre de fermeture. SECURITE D’INVERSION L’ouverture du contact de sécurité provoque l’inversion du mouvement (réouverture) lors de la phase de fermeture. STOP L’ouverture du contact de sécurité provoque l’arrêt du mouvement. ARRET D’URGENCE Par obtenir un arrêt d’urgence (par exemple, à travers le boutonpoussoir rouge), raccorder les commandes d’ouverture et de fermeture à la borne 9 au lieu de la borne 1 (9-3, 9-4, 9-20). COMMANDE HOMME MORT L’ouverture permanente du contact de sécurité habilite la fonction homme mort. Dans ces conditions, les commandes d’ouverture (1-3, 1-20) et de fermeture (1-4) ne fonctionnent que si elles sont maintenues enfoncées. Au relâchement, l’automatisme s’arrêtera. Les éventuelles sécurités présentes, la commande pas-à-pas et la fermeture automatique sont déshabilitées. OUVERTURE PARTIELLE La fermeture du contact active une manoeuvre d’ouverture partielle du vantail commandée par le moteur 1, sur la durée imposée par le trimmer RP. Lorsque l’automatisme est à l’arrêt, la commande d’ouverture partielle effectue la manoeuvre opposée à celle de l’arrêt. FIN DE COURSE DE L’ouverture du contact du fin de course arrête le mouvement de FERMETURE M2 fermeture du moteur 2 (M2). Avec le pontet OM=OFF (modalité un moteur), le fin de course arrête le mouvement de fermeture du moteur 1 (M1). FIN DE COURSE DE PROXIMITE M2 FIN DE COURSE DE FERMETURE M1 Voir les exemples aux paragraphes 5.4 et 6.4. FIN DE COURSE DE PROXIMITE M1 Voir les exemples aux paragraphes 5.4 et 6.4. TM=MAX 0 L’ouverture du contact du fin de course arrête le mouvement de fermeture du moteur 1 (M1). Avec le pontet OM=OFF (modalité un moteur), le fin de course arrête le mouvement d’ouverture du moteur 1 (M1). ATTENTION: Shunter tous les contacts N.C. s’ils ne sont pas utilisés. Les bornes présentant le même numéro sont équivalents. La garantie de fonctionnement et les performances déclarées ne peuvent être obtenues qu’en utilisant les accessoires et les dispositifs de sécurité DITEC. 21 LOGICM - IP1854 F 1.2 Bourrelet de sécurité autocontrôlé SOFA1-SOFA2 1 Commande 6 N.C. 1 7 N.C. 1 8 N.C. 41 Fonction Description SECURITE EN OUVERTURE Raccorder le contact de sortie du dispositif SOFA1-SOFA2 aux bornes 1-6 du tableau électronique (en série avec le contact de sortie de la photocellule, si présente). SECURITE EN FERMETURE Raccorder le contact de sortie du dispositif SOFA1-SOFA2 aux bornes 1-7 du tableau électronique (en série avec le contact de sortie de la photocellule, si présente). SECURITE D’INVERSION Raccorder le contact de sortie du dispositif SOFA1-SOFA2 aux bornes 1-8 du tableau électronique (en série avec le contact de sortie de la photocellule, si présente). SAFETY TEST Raccorder la borne du dispositif SOFA1-SOFA2 à la borne 41 du tableau électronique. A travers la borne 41, est activé un test du bourrelet de sécurité avant chaque manoeuvre. Si le test échoue, le voyant SA clignote et le test doit être répété. 1.3 Sorties et accessoires Sortie Valeur 1 0 + - 24 V= / 0,5 A 1 11 24 V= / 3 W (0,125 A) 1 12 24 V= / 3 W (0,125 A) 1 13 24 V= / 3 W (0,125 A) 0 14 24V= / 50 W (2 A) Description Alimentation des accessoires. Sortie de l’alimentation des accessoires externes avec lampes d’état d’automatisme. Lampe d’automatisme ouvert. C’est uniquement avec le fin de course 0-11 (N.C.) raccordé en modalité un moteur (pontet OM=OFF) que la lumière s’éteint lorsque l’automatisme est refermé. Lampe d’automatisme refermé. C’est uniquement avec le fin de course 0-12 (N.C.) raccordé en modalité un moteur (pontet OM=OFF) que la lumière s’éteint lorsque l’automatisme est ouvert. Lampe d’automatisme ouvert. Allume une lampe qui ne s’éteint que lorsque l’automatisme est refermé. Clignotant (LAMPH). S’active lors de la manoeuvre d’ouverture et de fermeture. Verrouillage électrique 24 V. S’active à chaque commande d’ouverture. 0 15 24V= / 1,2 A 0 15 12V~ / 15 W UW V 230 V~ / 2,5 A 120 V~ [LOGICMJ] M1 X Z Y 230 V~ / 2,5A 120 V~ [LOGICMJ] M2 W X N 230 V~ / 100 W (0,4 A) 120 V~ [LOGICMJ] L 230 V~ / 100 W (0,4 A) 120 V~ [LOGICMJ] LOGICM - IP1854 Frein électrique du moteur 24 V. Avec JR6=OFF, OM=OFF, DIP5=ON, la sortie est activée sur toute la durée du mouvement, aussi bien en ouverture qu’en fermeture. Serrure électrique 24 V. Avec EO=OFF la sortie est active lorsque l’automatisme est fermé. Serrure électrique 12 V. Connecter en série la résistance de 8,2 Ω / 5 W fournie avec l’équipement. S’active à chaque commande d’ouverture. Moteur 1 (M1). La borne W est raccordée au commun des phases du moteur. Le condensateur est raccordé entre les phases U et V. Remarque: si la rotation du moteur ne correspond pas au sens de marche, inverser les phases U et V. Moteur 2 (M2). La borne Z est raccordée au commun des phases du moteur. Le condensateur est raccordé entre les phases X et Y. Remarque: si la rotation du moteur ne correspond pas au sens de marche, inverser les phases X et Y. Clignotant (LAMP). S’active lors de la manoeuvre d’ouverture et de fermeture. Lumière de courtoisie. Uniquement en modalité 1 moteur (pontet OM=OFF et en l’absence de moteur raccordé aux bornes X-Z-Y), on pourra raccorder une lumière de courtoisie qui s’activera 180 s à partir de la réception de chaque commande d’ouverture (totale ou partielle) et de fermeture. 22 2. REGLAGES F 2.1 Trimmer Trimmer TM Description Réglage du temps de manoeuvre. De 10 à 120 s. Remarque: en présence d’un fin de course N.C., imposer TM=MAX. 60 s MIN=10 s MAX=120 s TR 10 s 20 s 3s MIN=0 s 30 s TC MAX=120s MIN=0s RF 3 4 Réglage du temps de retard à la fermeture moteur 1 (M1). En fermeture, le moteur 1 (M1) est lancé avec un retard réglable TR de 0 à 30 s, par rapport à M2. En ouverture, le moteur 2 (M2) est lancé avec 3 s de retard par rapport à M1. Si TR=MIN, les vantaux partent simultanément. Remarque: il est conseillé d’imposer TR=MIN avec des vantaux sans superposition ou bien d’imposer TR>3 s avec des vantaux qui se superposent. Réglage du temps de fermeture automatique. De 0 à 120 s. Avec DIP3=OFF et après l’intervention d’une sécurité, le décompte démarre au relâchement de la sécurité (par exemple, après le passage à travers les photocellules), et perdure sur la moitié du temps imposé avec TC (50%). Avec DIP3=ON, le décompte démarre avec l’automatisme ouvert et perdure sur toute la durée imposée avec TC (100%). Remarque: après l’activation de la commande de stop, à la fermeture du contact 1-9, la fermeture automatique n’est habilitée qu’après une commande d’ouverture totale, partielle ou pas-à-pas. Réglage de la force. Règle la tension fournie au moteur (1=MIN / 5=MAX). 2 5 1 R1 MIN MAX=disabled RP 0s Réglage de la poussée sur les obstacles. Le tableau électronique est équipé d’un dispositif de sécurité qui, en présence d’un obstacle lors de la manoeuvre d’ouverture, arrête le mouvement, alors que, lors de la manoeuvre de fermeture, il arrête ou inverse le mouvement. Avec R1=MIN, on obtient la sensibilité maximale aux obstacles (poussée minimale). Avec R1=MAX, la fonction de détection est déshabilitée (poussée maximale). Réglage de l’ouverture partielle moteur 1 (M1). De 0 à 30 s. 30 s 23 LOGICM - IP1854 F 2.2 Dip-Switch DIP1 DIP2 DIP3 DIP4 DIP5 DIP6 Description Modalité radio. Sélection du sens de marche. Renouvellement du temps de fermeture automatique. Etat de l’automatisme à la mise en marche. Indique la façon dont le tableau électronique considère l’automatisme lors de la mise en marche. Déverrouillage de la serrure électrique. Préclignotement fixe de 3 s. OFF Pas-à-pas. Ouverture vers la droite. 50% ON Ouverture. Ouverture vers la gauche. 100% Ouvert. Fermé. Remarque: en présence d’un fin de course, Remarque: si la fermeture automatique ii est conseillé d’imposer DIP4=OFF. n’est pas utilisée, il est conseillé d’imposer DIP4=ON. Déshabilité. Habilité. Déshabilité en ouverture. Habilité aussi bien en ouverture qu’en ferHabilité uniquement avec fermeture auto- meture. matique et TC supérieur à 3 s. 2.3 Jumper JR4 Description Réduction de la surcourse. Réduit la distance de la surcourse du vantail. Typologie d’application. Système électronique antigel. Maintient l’efficience des moteurs, même à basse température ambiante. Remarque: pour un bon fonctionnement, le tableau électronique doit se trouver à la même température ambiante que celle des moteurs. Démarrage à la force maximale. OFF ON Déshabilitée. Remarque: imposer JR4=OFF si le moteur est muni d’un frein électrique. Portail coulissant. Habilité. Attention: ne pas utiliser avec LOGICMJ. Habilitée. Remarque: il est conseillé d’imposer JR4=ON si le vantail effectue une surcourse excessive. Autres applications. Déshabilité. Déshabilité. Le moteur part à la tension imposée avec RF. OM Typologie d’automatisme. Automatisme à un moteur (uniquement M1). D5 Séquence pas-à-pas. Ouvre-stop-ferme-stop-ouvre. S5 Durée de l’arrêt (stop) dans la Permanent. séquence pas-à-pas. (Fermeture automatique désactivée). JT Temps de manoeuvre de ferme. Paramétré avec TM+4 s. Remarque: programmer JT=OFF avec motoréducteurs oléodynamiques ou bien à embrayage. EO Fonctionnement de la serrure Alimentée avec l’automatisme fermé. électrique. Habilité. Le moteur part à la tension maximale pendant 1 s. Automatisme à deux moteurs indépendants. Ouvre-stop-ferme-apre. Temporaire. (Fermeture automatique désactivée). Automatique. JR6 NIO JR10 Alimenté pendant 1 s au début de la manoeuvre d’ouverture. 2.4 Pontet Description SO OFF ON Fonctionnement de sécurité de Avec l’automatisme à l’arrêt, si le contact Avec l’automatisme à l’arrêt, si le contact inversion. 41-8 est ouvert, on pourra activer la ma- 41-8 est ouvert, on empêchera toute manoeuvre d’ouverture. noeuvre. 2.5 Signalisations LED POWER SA IN 11 12 LOGICM - IP1854 Allumé Clignotant Présence de tension 24 V=. / Indique qu’au moins l’un des contacts de sécurité A la mise en marche, le voyant clignote pour indiquer le décompte des manoeuvres effectuées : est ouvert. chaque clignotement rapide = 1000 manoeuvres chaque clignotement lent = 10000 manoeuvres En cas d’utilisation du dispositif SOFA1-SOFA2, il indique l’échec du test de sécurité (borne 41). S’allume à chaque commande et à chaque modifi/ cation des commutateurs DIP et des pontets. / Indique que le contact du fin de course 0-11 est ouvert Indique que le contact du fin de course 0-12 est ouvert / 24 3. DEMARRAGE 3.1 3.2 3.15 3.16 Shunter les contacts de sécurité N.C. Avant de procéder à la mise en marche, vérifier le type de l’application choisie. Si l’automatisme est à un vantail, imposer OM=OFF. Si l’automatisme est un portail coulissant, imposer JR6=OFF. Si l’on raccorde les fins de course, ils devront être réglés de manière à intervenir à proximité de l’arrêt mécanique d’ouverture et de fermeture. Imposer TM=MAX. Remarque: les fins de course doivent rester enfoncés jusqu’à la fin de la manoeuvre. Si les fins de course ne sont pas raccordés, shunter les bornes 0-11 et 0-12 et imposer TM à la moitié. Imposer RF=3 et R1 à la moitié. Imposer TR>3 s avec des automatismes à deux vantaux qui se superposent. Fournir l’alimentation. ATTENTION: Les manoeuvres interviennent sans sécurités. Inverser les polarités du moteur en fonction du sens de marche des vantaux. Remarque: la première manoeuvre de fermeture après une interruption d’alimentation, si TR>MIN, est exécutée un vantail après l’autre (tout d’abord le vantail déplacé par le moteur M2, puis le vantail déplacé par le moteur M1) ; si TR=MIN, les vantaux partent simultanément. Donner des commandes d’ouverture et de fermeture et vérifier le bon fonctionnement de l’automatisme et le réglage des fins de course (si présents). Raccorder les dispositifs de sécurité (en retirant les pontets correspondants) et en vérifier le bon fonctionnement. Si nécessaire, activer la fermeture automatique et la régler à l’aide du trimmer TC. Imposer RF sur la position permettant le bon fonctionnement de l’automatisme et préservant la sécurité de l’utilisateur en cas de choc. Imposer, à l’aide de R1, la poussée sur les obstacles. Remarque: si le vantail qui se referme en second rencontre un obstacle, les deux vantaux se rouvrent. La manoeuvre de fermeture successive s’effectue un vantail à la fois. Vérifier que les forces opérationnelles des vantaux sont conformes aux normes EN12453-EN12445. Si nécessaire, imposer, à l’aide de RP, l’ouverture partielle du moteur 1. Si nécessaire, raccorder le récepteur de la radiocommande au connecteur OPEN, programmer les émetteurs comme indiqué dans le manuel correspondant et en vérifier le fonctionnement. Raccorder les autres accessoires éventuels et en vérifier le bon fonctionnement. Après la mise en marche et les vérifications, refermer le boîtier. 4. RECHERCHE PANNES 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13 3.14 Probleme Cause possible L’automatisme ne s’ouvre et ne Manque de tension. se referme pas. (voyant POWER éteint). Accessoires en court-circuit. (voyant POWER éteint). Fusible de ligne grillé. (voyant POWER éteint). Les contacts de sécurité sont ouverts. (voyant SA allumé). Les contacts de sécurité ne sont pas correctement raccordés ou bien le bourrelet de sécurité autocontrôlé SOFA1-SOFA2 ne fonctionne pas correctement (voyant SA clignotant). Microinterrupteur de déverrouillage ouvert (si présent). Le thermique du moteur est ouvert. Intervention Vérifier que le tableau électronique est correctement alimenté. Débrancher tous les accessoires des bornes 0-1 (il doit s’y trouver une tension de 24 V=) et les rebrancher l’un après l’autre. Remplacer le fusible. Vérifier que les contacts de sécurité sont correctement fermés (N.C.). Vérifier les raccordements aux bornes 6-7-8 du tableau électronique et les raccordements au bourrelet de sécurité autocontrôlé SOFA1-SOFA2. Vérifier la fermeture du portail et le contact du microinterrupteur. Vérifier la continuité entre les phases des moteurs débranchés du tableau électronique. Vérifier que les contacts de sécurité sont correcteL’automatisme s’ouvre mais ne Les contacts de sécurité sont ouverts. (voyant SA allumé). se referme pas. ment fermés (N.C.). Les contacts de sécurité ne sont pas correcte- Vérifier les raccordements aux bornes 6-7-8 du ment raccordés ou bien le bourrelet de sécurité tableau électronique et les raccordements au bourautocontrôlé SOFA1-SOFA2 ne fonctionne pas relet de sécurité autocontrôlé SOFA1-SOFA2. correctement. (voyant SA clignotant). Les photocellules sont activées. Contrôler le fonctionnement des cellules photoé(voyant SA allumé). lectriques et les nettoyer éventuellement. La fermeture automatique ne marche pas. Vérifier que le contact 1-2 est fermé. Les sécurités externes n’inter- Raccordements erronés entre les cellules Raccorder les contacts de sécurité N.C. en série viennent pas. photoélectriques et le tableau électronique. entre eux et retirer les éventuels pontets du bornier du tableau électronique. 25 LOGICM - IP1854 F 5. EXEMPLE D’APPLICATION D’AUTOMATISMES A DEUX VANTAUX Lorsque le tableau électronique LOGICM est utilisé dans des applications d’automatismes à deux vantaux, on pourra choisir l’une des modalités de fonctionnement suivantes. R1<MAX TM<MAX - (Fig. 5.1) Les vantaux s’arrêtent sur les butées mécaniques et sur les obstacles. Imposer le temps de manoeuvre 2 à 3 s supérieur au temps réel utilisé par le vantail (TM<MAX) et shunter les bornes 0-11-12. Avec ces raccordements, chacun des vantaux s’arrête sur la butée mécanique d’ouverture et de fermeture et en cas de détection d’obstacle. - (Fig. 5.2) Les vantaux s’arrêtent sur les fins de course et sur les obstacles. Les contacts N.C. des fins de course d’ouverture et de fermeture sont en série avec les phases des moteurs. Imposer le temps de manoeuvre TM<MAX et shunter les bornes 0-11-12. Avec ces raccordements, chacun des vantaux s’arrête sur le fin de course d’ouverture et de fermeture et en cas de détection d’obstacle. - (Fig. 5.3) Les vantaux s’arrêtent sur les fins de course et s’inversent sur les obstacles. Imposer le temps de manoeuvre TM=MAX et raccorder les contacts N.C. des fins de course de fermeture aux bornes 0-1112 et les contacts N.C. des fins de course d’ouverture en série avec la phase d’ouverture de chacun des moteurs. Avec ces raccordements, chacun des vantaux s’arrête lorsque les fins de course interviennent. En cas de détection d’obstacle lors de la manoeuvre d’ouverture, seul le vantail ayant relevé l’obstacle s’arrête avec une manoeuvre de dégagement. Lors de la manoeuvre de fermeture, les deux vantaux se rouvrent. - (Fig. 5.4) Les vantaux s’arrêtent sur les butées mécaniques et s’inversent sur les obstacles. Imposer le temps de manoeuvre 2 à 3 s supérieur au temps réel utilisé par le vantail (TM<MAX), raccorder les contacts N.O. des fins de course de proximité de fermeture aux bornes 0-11-12 et les positionner 2 à 3 s avant la butée mécanique. Avec ces raccordements, chacun des vantaux s’arrête sur sa propre butée mécanique de fermeture et d’ouverture. En cas de détection d’obstacle lors de la manoeuvre d’ouverture, seul le vantail ayant relevé l’obstacle s’arrête avec une manoeuvre de dégagement. Lors de la manoeuvre de fermeture, en cas de détection d’obstacle avant l’intervention du fin de course de proximité, les vantaux se rouvrent ; après l’intervention du fin de course de proximité, les vantaux s’arrêtent sur l’obstacle. - (Fig. 5.5) Le vantaux s’arrêtent sur les fins de course en ouverture et sur les butées mécaniques en fermeture et s’inversent sur les obstacles. Imposer le temps de manoeuvre 2 à 3 s supérieur au réel utilisé par le vantail (TM<MAX), raccorder les fins de course de proximité de fermeture aux bornes 0-11-12 et les positionner 2 à 3 s avant la butée mécanique. Raccorder les fins de course N.C. d’ouverture en série avec la phase d’ouverture de chaque moteur. Avec ces raccordements, le vantail s’arrête sur la butée mécanique de fermeture, et en ouverture lorsque le fin de course correspondant intervient. Lors de la manoeuvre d’ouverture et en cas de détection d’obstacle, le vantail s’arrête avec une manoeuvre de dégagement. Lors de la manoeuvre de fermeture et en cas de détection d’obstacle avant l’intervention du fin de course de proximité, les vantaux se rouvrent; après l’intervention du fin de course de proximité, les vantaux s’arrêtent sur l’obstacle. LOGICM - IP1854 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Fig. 5.1 Limit switch (230 V - 5A) R1<MAX TM<MAX com com U W V X Z Y 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 M1 1~ M2 1~ Fig. 5.2 Opening limit switch (230 V - 5A) R1<MAX TM=MAX com com U W V X Z Y 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 M1 1~ M2 1~ Closing limit switch Fig. 5.3 R1<MAX TM<MAX 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Closing proximity switch Opening limit switch (230 V - 5A) Fig. 5.4 R1<MAX TM<MAX com U W V X Z Y 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 com F M1 1~ M2 1~ Closing proximity switch Fig. 5.5 26 6. EXEMPLE D’APPLICATION D’AUTOMATISMES A UN VANTAIL Lorsque le tableau électronique LOGICM est utilisé dans des applications d’automatismes à un vantail, on pourra choisir l’une des modalités de fonctionnement suivantes. F OM - (Fig. 6.1) Le vantail s’arrête sur les butées mécaniques et sur les obstacles. Imposer un temps de manoeuvre 2 à 3 s supérieur au temps réel utilisé par le vantail (TM<MAX) et shunter les bornes 0-11-12. Avec ces raccordements, le vantail s’arrête sur la butée mécanique d’ouverture et de fermeture et en cas de détection d’obstacle. - (Fig. 6.2) Le vantail s’arrête sur les fins de course et sur les obstacles. Les contacts N.C. des fins de course d’ouverture et de fermeture sont en série avec les phases du moteur. Imposer le temps de manoeuvre TM<MAX et shunter les bornes 0-11-12. Avec ces raccordements, le vantail s’arrête sur le fin de course d’ouverture et de fermeture et en cas de détection d’obstacle. - (Fig. 6.3) Le vantail s’arrête sur les fins de course et s’inverse sur les obstacles. Imposer le temps de manoeuvre TM=MAX et raccorder les contacts N.C. des fins de course d’ouverture et de fermeture aux bornes 0-11-12. Avec ces raccordements, le vantail s’arrête lorsque les fins de course interviennent. En cas de détection d’obstacle lors de la manoeuvre d’ouverture, le vantail s’arrête avec une manoeuvre de dégagement; lors de la manoeuvre de fermeture, le vantail se rouvre. - (Fig. 6.4) Le vantail s’arrête sur les butées mécaniques et s’inverse sur les obstacles. Imposer le temps de manoeuvre 2 à 3 s supérieur au temps réel utilisé par le vantail (TM<MAX) et positionner les fins de course de proximité 2 à 3 s avant la butée mécanique. Avec ces raccordements, le vantail s’arrête sur sa propre butée mécanique d’ouverture et de fermeture. Lors de la manoeuvre d’ouverture, en cas de détection d’obstacle avant l’intervention du fin de course de proximité, le vantail s’arrête avec une manoeuvre de dégagement ; après l’intervention du fin de course de proximité, le vantail s’arrête sur l’obstacle. Lors de la manoeuvre de fermeture, en cas de détection d’obstacle avant l’intervention du fin de course de proximité, le vantail se rouvre ; après l’intervention du fin de course de proximité, le vantail s’arrête sur l’obstacle. - (Fig. 6.5) Le vantail s’arrête sur le fin de course en ouverture et sur la butée mécanique en fermeture, et s’inverse sur les obstacles. Imposer le temps de manoeuvre 2 à 3 s supérieur au temps réel utilisé par le vantail (TM<MAX), positionner les fins de course de proximité de fermeture 2 à 3 s avant la butée mécanique et raccorder le fin de course N.C. d’ouverture en série avec la phase d’ouverture du moteur. Avec ces raccordements, le vantail s’arrête sur la butée mécanique de fermeture, et en ouverture lorsque le fin de course correspondant intervient. Lors de la manoeuvre d’ouverture, en cas de détection d’obstacle, le vantail s’arrête avec une manoeuvre de dégagement. Lors de la manoeuvre de fermeture, en cas de détection d’obstacle avant l’intervention du fin de course de proximité, le vantail se rouvre ; après l’intervention du fin de course de proximité, le vantail s’arrête sur l’obstacle. R1<MAX TM<MAX 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Fig. 6.1 Limit switch (230 V - 5A) OM R1<MAX TM<MAX com U W V X Z Y 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 M1 1~ Fig. 6.2 OM R1<MAX TM=MAX 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Opening limit switch Closing limit switch Fig. 6.3 OM R1<MAX TM<MAX 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Opening proximity switch Closing proximity switch Fig. 6.4 Opening limit switch (230 V - 5A) OM R1<MAX TM<MAX com U W V X Z Y 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Closing proximity switch M1 1~ Fig. 6.5 27 LOGICM - IP1854 7. EXEMPLE D’APPLICATION DE PORTAILS COULISSANTS OM=OFF JR6=OFF Lorsque le tableau électronique LOGICM est utilisé dans des applications d’automatismes coulissants : - imposer OM=OFF - imposer JR6=OFF - imposer TM=MAX (Fig. 7.1) Raccorder les contacts N.F. des fins de course d’ouverture et de fermeture aux bornes 0-11-12. Avec ces raccordements, le vantail s’arrête lorsque les fins de course interviennent. En cas de détection d’obstacle lors de la manoeuvre d’ouverture, le vantail s’arrête avec une manoeuvre de dégagement ; durant la manoeuvre de fermeture, le vantail se rouvre. R1<MAX TM=MAX Opening limit switch Closing limit switch 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Fig. 7.1 DIP2=OFF (Fig. 7.2) Sélectionner le sens d’ouverture à l’aide du DIP2. DIP2=ON Fig. 7.2 EXEMPLE D’APPLICATION DES BARRIERES 4 3 8. 2 5 1 OM=OFF Lorsque le tableau électronique LOGICM est utilisé dans des applications de barrières : - imposer OM=OFF - imposer RF=5 (MAX) - imposer TM=MAX (Fig. 8.1) Raccorder les contacts N.F. des fins de course d’ouverture et de fermeture aux bornes 0-11-12. RF=5 R1<MAX TM=MAX 1514 1312 11 0 0 1 1 2 3 4 5 6 7 8 9 2041 Opening limit switch Closing limit switch F (Fig. 8.2) Sélectionner le sens d’ouverture à l’aide du DIP2. DIP2=OFF Fig. 8.1 DIP2=ON Fig. 8.2 Touts droits reservés Les informations mentionnées dans ce catalogue ont été controlées avec la plus grande attention. Toutefois, nous déclinos toute responsabilité en cas d’erreurs, omissions ou approximations dépendant d’exigences techniques ou graphiques. LOGICM - IP1854 28 ">
/
Scarica
Solo un promemoria. Puoi visualizzare il documento qui. Ma soprattutto, la nostra IA l''ha già letto. Può spiegare cose complesse in termini semplici, rispondere alle tue domande in qualsiasi lingua e aiutarti a navigare rapidamente anche nei documenti più lunghi o complicati.
Link pubblico aggiornato
Il link pubblico alla tua chat è stato aggiornato. Puoi visualizzare e gestire i tuoi link di chat dopo la registrazione qui.




