© Copyright Juillet 2000, Trimble Navigation Limited. Tous droits réservés. Le logo Trimble et Trimble est une marque déposée Trimble Navigation Limited, enregistrée au bureau des marques et des Brevets des Etats-Unis.
HYDROpro est une marque de commerce de Trimble Navigation Limited. Numéro de pièce 43477-00-FRA, Révision A
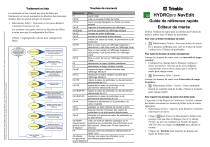
Le traitement en lots contient une série de filtres qui
fournissent un moyen automatisé de détection des mauvaises
données dans les grands groupes de données.
Appuyez sur
1. Sélectionnez Editer / Traitement en lots pour démarrer
l’assistant Traitement en lots.
Cet assistant vous guide à travers la sélection des RNav
à traiter ainsi que la configuration des filtres.
Utilisez l’organigramme suivant pour configurer les
filtres:
Données
de profondeur le long
du repère de navigation
sélectionné (Données de
pilonnement, marée
facultatives)
Filtre de profondeur
Oui
Identifiez le valeurs de profondeur
hors des limites min/max et hors
et la limite de qualité min
Filtre de pointes
Oui
Non
Ajustements de
profondeur
Oui
Appliquez le facteur d'échelle et le
déport vertical aux profondeurs
entre la gamme des
profondeurs sélectionnée
ouvrir l’Aide
Ctrl+N
créer un nouveau Fichier de marée
Ctrl+O
ouvrir un projet Navigation ou Fichier de marée
existant
Ctrl+R
organiser automatiquement les affichages
Alt+Entrée
ouvrir les propriétés de l’affichage souligné
Ctrl+Q
changer les unités d’affichage
Ctrl+Z
annuler la commande la plus récente
Ctrl+I
insérer une valeur de marée, de pilonnement ou de
profondeur
Ctrl+W
faire un zoom avant sur l’affichage Graphique /
sélectionner l’outil Zoom avant sur l’affichage Carte
Ctrl+Y
faire un zoom arrière de l’affichage Graphique /
sélectionnez l’outil Zoom arrière sur l’affichage
Carte
Ctrl+X
faire un zoom de tout sur l’affichage Graphique ou
Carte
F6
sélectionner la région d’édition précédente
Oui
Sélectionnez les canaux de
profondeur traiter
Oui
Identifiez les valeurs de profondeur
qui n'ont pas une valeur de
pilonnement associée dans la limite
d'âge de pilonnement, aussi
les valeurs de pilonnement max.
Oui
Identifiez les positions hors de
la solution min ou les valeurs
PDOP max
Non
Positions et
hors de ligne
Oui
Identifiez les positions hors de
limites de position min/max ou de
limite de hors de ligne
Non
Filtre de marée
Repère de navigation
suivant
Oui
Identifiez les valeurs de
profondeur qui n'ont pas une valeur
de marée avant ou après que la
valeur de profondeur s'est produite.
Utilisez l’Editeur de marée pour la création des Fichiers de
marée à utiliser dans l’Editeur de profondeur.
Pour créer un fichier d’indicateur de marée
1.
. Sélectionnez Fichier / Nouveau fichier de marée.
Il y a plusieurs méthodes pour créer un Fichier de marée
à utiliser avec l’Editeur de profondeur.
Pour saisir les données de marée manuellement
Lorsque les données de marée sont à un intervalle de temps
constant:
1. Configurer les champs dans le dialogue Configurer /
Editer paramètres. Une fois qu’ils sont configurés
correctement vous ne devez entrer que la valeur de
marée pour chaque entrée.
sélectionner la région d’édition suivante
marquer la région d’édition courante dans
l’affichage Miniature
Ctrl+U
démarquer la région d’édition courante dans
l’affichage Miniature
2.
Ctrl+F8
réduire la valeur de profondeur ou de pilonnemen
sélectionnée de 0,01
Lorsque les données de marée sont d’intervalles de temps
irréguliers:
Ctrl+F9
augmenter la valeur de profondeur ou de
pilonnement sélectionnée de 0,01
•
Ctrl+Shift+F8
réduire la valeur de profondeur ou de pilonnement
sélectionnée de 0,01
Ctrl+Shift+F9
augmenter la valeur de profondeur ou de
pilonnement sélectionnée de 0,01
Ctrl+K
restaurer le pilonnement ou la profondeur à la
valeur originelle
Ctrl+L
appliquer un délai d’attente de sondeur à écho
Ctrl+F
basculer l’état de l’indicateur des valeurs de
profondeur ou de pilonnement sélectionnées.
Ctrl+S
interpoler une gamme de valeur de profondeur ou
de pilonnement
Ctrl+Shift+
cliquez bouton
gche de souris
et déplacer
créer une boîte de sélection graphique sur le
graphique pour la sélection des profondeurs ou du
pilonnement. Utilisez avec F5 pour basculer la
sélection.
pour trouver et sélectionner le fichier texte
2. Cliquez
(assurez-vous que dans le dialogue Ouvrir, le champ
Fichiers de type est configuré sur Fichiers de marée
ASCII (*.txt).) et cliquez sur Suivant> pour afficher le
résumé.
F5
basculer entre les profondeurs sélectionnées de
canal 1 et 2
3. Cliquez sur Terminer pour importer les données de
marée du fichier texte.
Non
Etat GPS
Editeur de marée
Ctrl+M
Non
Filtre de
pilonnement
Guide de référence rapide
F7
Non
Canal de
profondeur
Pour ...
F1
Non
Identifiez les pointes de
profondeur basées sur l'ampleur
et le temps
T
HYDROpro NavEdit
Touches de raccourci
Traitement en lots
Alt+cliquez
changer une valeur de profondeur ou de
btn gauche de pilonnement graphiquement
souris+déplacer
. Sélectionnez Editer / Ajouter.
. Sélectionnez Editer / Insérer. Cette commande
fournit un contrôle total de la date, l’heure et la marée
pour chaque entrée.
Pour importer les données de marée d’un fichier texte
L’Appendice D du Manuel de l’utilisateur NavEdit contient
des détails concernant les formats de fichier texte de marée
appropriés.
1. Sélectionnez Fichier / Importer pour démarrer l’assistant
Importation de marée.
Pour importer les données de marée d’un projet de Navigation
Pour ouvrir un projet Navigation pour la première fois
1. Sélectionnez Fichier / Importer pour démarrer l’assistant
Importation de marée.
1.
2. Cliquez
pour trouver et sélectionner le projet Navigation (assurez-vous que dans le dialogue Ouvrir, le champ
Fichiers de type est configuré sur Fichiers Nav seuls
(*.mdb)) et cliquez sur Suivant>.
2.
. L’assistant Configuration Editeur de données se
démarre. Sélectionnez un levé et un navire et cliquez sur
Suivant>.
3.
. Sélectionnez le sondeur à écho et les Services de
pilonnement à afficher. Vous pouvez également
sélectionner le fichier(s) de marée à afficher et cliquer
sur Suivant>.
4.
. Sélectionnez le RNav relevé pour lequel il faut afficher
les données et et cliquez sur Suivant>.
3. Sélectionnez le levé requis à partir duquel il faut extraire
les données et cliquez sur Suivant>.
4. Sélectionnez le Service de marée requis et cliquez sur
Suivant>.
5. Confirmez que les informations de résumé sont correctes
puis cliquez sur Terminer pour importer les données de
marée.
Editeur de profondeur
Affichage de grille
ASTUCE – Pour afficher le levé entier sélectionnez <LEVE>.
5.
La figure suivante montre un affichage typique de l’Editeur de
profondeur une fois que vous avez sélectionné un sondeur à
écho, et une région d’édition sur l’affichage Miniature (voir
l’étape 3 et l’étape 6 ci-contre):
Affichage de graphique
. Sélectionnez le déport du navire pour lequel il faut
afficher les positions enregistrées et cliquez sur
Terminer.
En général, <SONDEUR A ECHO> sera sélectionné. Ce
déport est toujours le déport auquel le sondeur à écho est
assigné. Le déport changera lorsque la configuration de
l’équipement du sondeur à écho change.
Les affichages Carte et Miniature s’affichent.
6. Cliquez et faites glisser-déplacer sur l’affichage Miniature
pour sélectionner une “région d’édition”.
Ainsi les affichages Graphique et Grille s’ouvrent. (Si les
affichages ne s’affichent pas, sélectionnez-les du menu
Affichage.)
7. Si nécessaire, réorganisez les affichages. Faites-le
manuellement ou sélectionnez Fenêtre / Organiser
automatiquement.
Maintenant vous êtes prêt pour l’édition des RNav. Utilisez la
barre d’outils Sélection Diriger vers pour sélectionner le RNav
suivant:
Miniature
Affichage de carte
1. Sélectionnez Exporter / Paramètres d’exportation.
2. Configurez les tabulations Paramètres d’exportation
comme requis:
a. Sélection de données – Sélectionnez s’il faut
sortir des profondeurs et/ou des événements et s’il
faut appliquer une réduction aux données.
b. Niveaux réduits – Ne sélectionnez cette option
que lorsque vous voulez exporter des niveaux
réduits plutôt que les profondeurs.
c. Paramètres de profondeur:
• Profondeur brute – La profondeur comme
enregistrée par le logiciel Navigation
•
NOTE – Les RNav sont listés dans l’ordre dans lequel ils sont relevés.
Un RNav peut apparaître plus d’une fois dans la liste. (Un numéro de
session est ajouté aux cas additionnels)
Utilisez l’Editeur de profondeur pour afficher et nettoyer les
données ayant rapport à la position et à la profondeur, et pour
générer des fichiers d’exportation avec les données
résultantes.
Affichage de grille
. Sélectionnez Fichier / Ouvrir pour trouver et ouvrir
le fichier du projet Navigation (assurez-vous que
dans le dialogue Ouvrir, le champ Types de fichiers
est configuré sur Fichiers Nav) et cliquez sur Ouvrir.
Pour exporter les données au logiciel de traitement
HYDROpro
Profondeur nettoyée – Les profondeurs
comme éditées dans le logiciel NavEdit, mais
sans l’application d’aucune correction de
pilonnement ou de marée.
•
Niveau réduit – Les profondeurs comme
éditées dans le logiciel NavEdit, mais sans
l’application d’aucune correction de
pilonnement ou de marée.
d. Personnaliser – Lors de l’exportation à une base
de données “terre” sélectionnez l’option négative
pour rendre les profondeurs négatives.
3. Sélectionnez Générer / Exporter. L’assistant Exporter se
démarre et vous guide dans la création du fichier
d’exportation:
a. Déport navire – Sélectionnez le déport
<SONDEUR A ECHO> pour exporter les
positions du sondeur à écho sélectionné.
b. Format de fichier et méthode de sélection de
points – Sélectionnez le format de fichier
d’exportation requis. Pour exporter au logiciel de
traitement HYDROpro, sélectionnez le format
d’exportation Fichier de transfert. Les autres
options dans cette étape vous permettent de
spécifier l’étendue de profondeurs à exporter.
c. Nom du fichier et résumé– Saisissez un nom pour
le fichier d’exportation et confirmez les sélections
dans le résumé.
">